

Гайдес М.А. - Общая теория систем. (Системы и системный анализ)
.docТест с максимальной физической нагрузкой у спортсмена. На оси Х отложена величина минутного выделения СО2 (VCO2), которая нарастала пропорционально росту нагрузки. Чётко видны точки перегиба кривых. Точки перегиба во всех случаях означают начало недостаточности функции. Серым фоном обозначены зоны недостаточности функций. Артериальное давление (blood pressure) до ПАО не меняется.
Если пропорция сохраняется, на графике функции будет отмечаться нарастание (падение) кривой (нормальная функция, рис. 24B, 26B) Но если ресурсы системы исчерпаны, она не сможет сохранять необходимую пропорцию между внешним воздействием и результатом действия. С этого момента она не сможет наращивать (снижать) свои функции пропорционально входному внешнему воздействию и кривая её функции перейдёт в плато (недостаточная функция, рис. 24B, 26B).
Примерами пропорциональных систем являются, например, усилители электрических сигналов, механические рычаги, морские течения (чем больше прогрев воды в океане, тем сильнее Гольфстрим), атмосферные явления и т.д.
Примерами такого рода систем могут быть сами сенсоры, поскольку величина их результата действия (частота импульсации, амплитуда напряжения, и т.д.) пропорциональна внешнему воздействию.
Система обмена метаболических газов (СОМГ), система внешнего газообмена (СВГ) и система кровообращения (СК) являются примерами пропорциональных биологических систем нашего организма. В ответ на увеличение физической нагрузки они наращивают свои функции.
Таким образом, примеры систем стабилизации и пропорциональных системы можно найти в любом мире, и не только в биологических системах.
Выводы:
1. у систем стабилизации результат действия должен быть всегда одинаковым (стабильным), независимо от величины внешнего воздействия
-
неизменная горизонтальность актуальной кривой независимо от величины внешнего воздействия является признаком достаточности резервов функции систем стабилизации
-
перегиб актуальной кривой и переход её из горизонтального направления в восходящее или нисходящее является признаком исчерпания резервов функции систем стабилизации
2. у пропорциональных систем результат действия должен быть всегда пропорционально зависимым от величины внешнего воздействия
-
изменение актуальной кривой пропорционально внешнему воздействию и её совпадение с должной кривой является признаком достаточности резервов функции пропорциональных систем
-
перегиб актуальной кривой и переход её из восходящего или нисходящего направления в горизонтальное является признаком исчерпания резервов функции пропорциональных систем
Активные и пассивные системы.
Пассивными системами называются те системы, которые не затрачивают своей внутренней энергии на свои действия.
Активными системами называются те системы, которые затрачивают свою внутреннюю энергию на свои действия.
Как уже не раз подчёркивалось, любое действие любых систем требует затрат энергии. Ни одно действие, даже самое ничтожное, невозможно без затрат энергии, потому что действие – это всегда взаимодействие между системами или её элементами. А любое взаимодействие – это связь между системами или её элементами, которая для своего создания требует вложения в неё энергии. Поэтому любое действие требует затрат энергии. Следовательно, любые системы потребляют энергию, в том числе и пассивные. Различие между активными и пассивными системами только в источнике энергии. Откуда берёт энергию пассивная система?
Если система находится в равновесном состоянии с окружающей средой и на неё не оказывается никакого воздействия, то система не должна делать никаких действий. А раз она не совершает действий, она не потребляет энергию. Она пассивна до того момента, пока нет внешнего воздействия и начинает действовать, когда оно появляется и лишь в этот момент она начинает потреблять энергию.
На рис. 27А равновесие карандаша обусловлено сбалансированным толканием (давлением) пружин на карандаш. Пружинки являются не просто случайными группами элементов (набором атомов и молекул), а пассивными системами с петлями ООС и исполнительными элементами на молекулярном уровне (межмолекулярными силами в стальных пружинках), которые стремятся сбалансировать силы межмолекулярных связей, что проявляется в виде силы напряжения пружин и стабильно вертикального положения карандаша. Поскольку в случае отсутствия внешнего воздействия нет действий самой системы, то нет и энерготрат (рис. 27А), система пассивно ждёт появления внешнего воздействия.
 А
В
А
В

 C
D
C
D

Рис. 27. Пассивная (А, В, D) и активная системы (С).
В пассивной системе (А и В) функция удержания карандаша в вертикальном положении выполняется пружинами (пассивными СФЕ). СФЕ запасают (используют) энергию во время внешнего воздействия (толкание пальцем карандаша сдавливает пружинки).
В активной системе (С) эта же функция достигается за счёт струй воздуха, которые создают вентиляторы (активные СФЕ) и которые тратят энергию, ранее запасённую, например, в аккумуляторах (на рисунке - Акк). Но эти струи постоянно разрушаются. Если заключить воздух этих струй в резиновые баллоны, то они уже не разрушатся и будут существовать независимо от вентиляторов, выполняя ту же функцию. Но это уже пассивная система (D).
Но вот внешнее воздействие появилось и карандаш отклонился в сторону (рис. 27В). Пружины тут же стремятся вернуть карандаш в прежнее положение, т.е., система начинает действовать. Откуда она берёт энергию для своих действий? Эту энергию принесло внешнее воздействие в виде кинетической энергии толкания пальцем, которое сжало (растянуло) пружинки и они запасли эту энергию в виде потенциальной энергии сжатия (растяжения). Как только внешнее воздействие (толкание пальцем) прекратилось, потенциальная энергия сжатых пружин превращается в кинетическую энергию их распрямления и это возвращает карандаш обратно в вертикальное сбалансированное положение.
Внешнее воздействие повышает внутреннюю энергию системы, которая затем используется для деятельности системы. Есть воздействие – есть избыток внутренней энергии системы, есть ответное действие системы. Нет воздействия – нет избытка внутренней энергии системы, нет её действия. Внешнее воздействие приносит энергию в систему, которая использует её для реакции на это воздействие.
Функции пружин могут выполнять струи воздуха, создаваемых вентиляторами, расположенными на карандаше (рис. 27С). На «постройку» струй воздуха затрачивается избыток энергии системы «вентиляторы-карандаш», также привнесённой извне, но сохраняемой до нужного времени (например, бензин в баке или электричество в аккумуляторе). Такая система уже будет активной, потому что использует свою внутреннюю предварительно накопленную энергию, а не энергию внешнего воздействия.
Отличие струй воздуха от пружин состоит в том, что струи воздуха состоят из случайных групп молекул воздуха (не системы), движущихся в одном направлении. Среди этих элементов есть элементы исполнения (СФЕ – молекулы воздуха), но нет блока управления, который мог бы построить систему из них наподобие пружин, т.е., обеспечить существование струй воздуха как стабильных отдельных и независимых тел (систем). Эти струи воздуха постоянно строятся пропеллерами вентиляторов и, поскольку у струй нет собственного блока управления, постоянно сами собой разрушаются. Если построить какую-либо систему, которая позволит струям воздуха не разрушаться, например, заключить их в резиновые баллоны (рис. 27D), то они смогут существовать уже независимо от вентиляторов. Но в этом случае система стабилизации вертикального положения карандаша перейдёт из категории активных в пассивную.
Следовательно, как активные, так и пассивные системы потребляют энергию. Однако пассивные потребляют внешнюю энергию, привносимую самим внешним воздействием, а активные – свою собственную внутреннюю энергию.
Могут возразить, что внутренняя энергия, скажем, миоцита всё равно является внешней, привнесённой в клетку извне, например, в виде глюкозы. Это правда, и более того, любой объект содержит внутреннюю энергию, которая когда-либо была внешней. И, возможно, мы даже знаем источник этой энергии – это энергия Большого Взрыва. На создание любого атома когда-то и где-то была затрачена определённая энергия, которую тем или иным путём можно извлечь из него. Такая внедрённая внутренняя энергия есть у любого объекта нашего Мира и невозможно найти никакой другой объект в нём, который бы содержал абсолютно свою собственную внутреннюю энергию, которую ничто и никогда не внедрило в него.
Следовательно, всегда при взаимодействии систем происходит обмен энергией. Но во время своей деятельности пассивные системы не тратят свою внутреннюю энергию, а используют только энергию внешнего воздействия. А активные системы тратят свою внутреннюю энергию, запасенную ранее.
Примерами активных систем в биологии являются миоциты, нейроны, секреторные клетки и все прочие системы, потребляющие в качестве энергии АТФ, который образуется в них в анаэробных и аэробных процессах из заранее запасенной глюкозы (гликогена).
Примерами пассивных систем являются аорта и вообще все артериальные сосудистые сети БКК и МКК, запасающие энергию ударного выброса во время систолы желудочков путём растяжения их упруго-эластических стенок. Во время диастолы эта запасённая потенциальная энергия растянутых артериальных стенок расходуется на их сокращение и выталкивание крови из артериальной сети в капиллярную и далее.
Пассивной системой является также грудная клетка, которая осуществляет пассивный выдох, и многие другие системы живого организма.
Выводы:
-
пассивные системы для выполнения своих действий используют энергию внешнего воздействия
-
активные системы для выполнения своих действий используют ранее запасенную энергию, а внешнее воздействие является только запускающим моментом для растраты этой энергии.
-
любая внутренняя энергия, по сути, является внешней, когда-либо ранее, но до момента данного внешнего воздействия привнесённой в систему извне.
Принцип независимости результата действия.
Как уже неоднократно подчеркивалось, целью любой системы является получение должного (целевого) результата действия, который получается после действий системы. Фактически внешнее воздействие, «войдя» в систему преобразуется в результат действия системы. Поэтому системы фактически являются преобразователями внешнего воздействия в результат действия, причины в следствие. А внешнее воздействие является результатом действия другой системы, которая сама, в свою очередь, взаимодействовала с третьей системой. Следовательно, результат действия, «выйдя» из одной системы и «войдя» в другую, существует уже независимо от системы его породившей.
Например, у строительной фирмы была цель из определённого количества строительного материала (внешнее воздействие) построить дом. После ряда действий этой фирмы дом оказался построен (результат действия). Далее фирма могла перейти к строительству другого дома, прекратить свое существование или переквалифицироваться в из строительной в пошивочную фирму. Но построенный дом уже будет существовать независимо от построившей его фирмы.
Стрессовая ситуация привела к выработке надпочечниками определённой порции адреналина. Эта ситуация может уже закончиться, а адреналин в крови будет циркулировать в ней до тех пор, пока не прореагирует с тканями-мишенями для него.
Результатом действия возбуждённого электрона будет выпущенный из атома фотон, который может бесконечно блуждать по просторам Вселенной на протяжении многих миллиардов лет. Результатом шлепка весла о воду является ямка на воде, которая также могла бы остаться на века, если бы не текучесть воды и не воздействие на неё тысяч других внешних воздействий. Однако после тысяч воздействий она останется уже не в виде ямки, а в виде другой длинной цепи результатов действий других систем, потому что ничто в этом мире не исчезает, а переходит в другие формы. Закон сохранения нерушим.
Выводы:
-
результат действия системы, после того как система его произвела (выработала), существует независимо от системы, его породившей
-
результат действия какой-либо системы является внешним воздействием для другой системы
-
система, породившая какой-либо результат действия, является системой-донором, а система, принявшая его в качестве внешнего воздействия является системой-мишенью (реципиентом)
-
системой-мишенью может быть какая-либо другая система и в этом случае система-мишень является передатчиком или преобразователем внешнего воздействия в результат действия
-
системой-мишенью может быть также та же самая система, которая «породила» данный результат действия и в этом случае система является генератором результатов действия
Эволюция систем.
Сложный блок управления.
Для наилучшего достижения цели система всегда должна выполнять свое действие оптимально, выдать свой результат действия в нужном месте и в нужное время. Её блок управления системы решает обе задачи – где и когда нужно срабатывать. У него есть свобода выбора действий для этого, у него должно быть понятие о времени и о пространстве и должны быть соответствующие сенсоры, поставляющие информацию о ситуации в данном пространстве.
У простого блока управления есть только понятие о времени, но нет понятия о пространстве. Конечно же это не те понятия, которые есть у нас, у людей. Это всего лишь какие-то начала понятия о времени, которое проявляется в очерёдности действий. Блок управления определяет, когда есть внешнее воздействие и определяет собственный результат действия после его появления. При этом, время выдачи результата действия у систем с простым блоком управления, в свою очередь, включает в себя два периода:
-
время, затраченное на принятие решения, от момента появления внешнего воздействия до момента активации СФЕ (время срабатывания блока управления)
-
время, затраченное на срабатывание СФЕ, от момента начала активации СФЕ до момента получения результата действия (время срабатывания СФЕ).
Время, затраченное на принятие решения, зависит от длительности циклов работы блока управления, и это было рассмотрено выше.
Время, затраченное на срабатывание СФЕ, зависит от свойств самих СФЕ, таких как, например, скорость биохимических реакций в живых клетках, или скорость сокращения саркомера в мышечных клетках, что в немалой степени зависит от соотношения скорости расхода энергии этими СФЕ и скорости восстановления энергетического потенциала после срабатывания этих СФЕ. Эти скорости в основном являются характеристиками, присущими самим СФЕ, но также определяются сервисными системами, которые обслуживают эти СФЕ. Метаболическая, простагландиновая, гормональная и вегетативная нервная регуляция в живом организма призваны как раз для этой цели – в какой-то степени менять скорости биохимических реакций в клетках тканей и условия доставки энергоносителей путём регуляции сервисных систем дыхания и кровообращения.
Но понятие «в нужное время» означает не только время срабатывания в ответ на внешнее воздействие. Во многих случаях необходимо срабатывать раньше или после внешнего воздействия. Однако система с простым блоком управления начинает срабатывать лишь после появления внешнего воздействия. Для систем, особенно для живых, это очень большой (катастрофический) недостаток, поскольку если уже есть внешнее воздействие на какой-либо организм, то, возможно, его уже начали кушать. Будет лучше, если система начнёт действовать ещё до того, как это внешнее воздействие начнётся. Если внешняя ситуация угрожает появлением опасного воздействия, то оптимальные действия системы могут предохранить её от него. А для этого нужно знать внешнюю ситуацию, уметь её увидеть, оценить и знать, какие действия необходимо сделать в определённых случаях. Т.е., нужно осуществлять управление получения реального результата действия по упреждению, перед внешним воздействием. Для выполнения этих действий он должен содержать специальные элементы, которые могут это делать.
Простой блок управления может осуществлять управление только по рассогласованию (расхождению) реального результата действия с заданным, потому что система с простым блоком управления не может «знать» ничего о внешней ситуации до того момента, пока эта ситуация не начнёт воздействовать на систему. Знание внешней ситуации для простого блока управления недоступно, потому что у неё есть только анализатор-контактор, который реагирует только после того, как произошел контакт. Поэтому простой блок управления всегда начинает срабатывать с запаздыванием, когда уже может быть слишком поздно управлять. Если не знать внешней ситуации, то система (живой организм) не сможет сделать прогноз ситуации и не сможет поймать жертву или предупредить встречу с хищником. Таким образом, простой блок управления не может принимать решения о месте и об изменении времени срабатывания.
Для этого блоку управления нужен специальный анализатор, который может определять и анализировать внешнюю ситуацию и, в зависимости от различных внешних или внутренних условий, может вырабатывать решение о своих действиях. У этого анализатора должно быть понятие не только о времени, но и пространстве, в котором разыгрывается определённая ситуация, а также соответствующие информаторы (сенсоры с линиями связи между ними и этим специальным анализатором), которые дают информацию о внешней ситуации. У простого блока управления ничего этого нет и он такого дополнительного специального анализатора не содержит. Потому он и называется простым. У него есть только анализатор-контактор, который чувствует с помощью сенсора «Х» внешнее воздействие только тогда, когда это воздействие уже началось, измеряет свой результат действия с помощью ООС (сенсора «У») лишь тогда, когда этот результат уже появился и анализирует получаемую информацию уже после того, как был выдан результат действия, и для всех этих действий требуется время. Простой нализатор содержит «базу данных», в которой в явной или неявной форме «записана» таблица должных значений контролируемых параметров (данные), которые нужно сравнивать с данными измерений внешнего воздействия и результатов действия. Но у него нет знаний о возможных внешних ситуациях, которые могут быть значимыми для данной системы. Его алгоритм управления основан только на сравнении данных измерений, проводимых рецепторами «Х» и «У», с «базой данных». Если, рассогласование равно «М», то нужно сделать, например, меньше действия, если он равен «N», то больше действия. Простой блок управления не может менять решения об изменении уровня контролируемого параметра, времени включения или глубины ООС, потому что у него нет соответствующей информации. Для выполнения этих действий он должен содержать специальные элементы, которые могут дать ему эту информацию.
Что же ему нужно для этого? Чтобы принять решение, данный блок должен «знать» ситуацию вокруг системы, которая может причинить определённое внешнее воздействие. Для этого он прежде всего должен «видеть» её, т.е., иметь для этого сенсоры, которые могут получать информацию на расстоянии и без прямого контакта (дистанционный информатор «С»).
Кроме этого он должен содержать специальный анализатор-классификатор, который может классифицировать внешнее окружение и выделять в нём не все объекты и ситуации, а лишь те, которые могут повлиять на выполнение его целей. И у него должны быть понятия о пространстве и времени.
Когда охотник стреляет в летящую утку, он стреляет не прямо в неё, а стреляет с упреждением, потому что знает, что пока пуля долетит до утки, она (утка) за это время переместится вперёд. Как система для поражения утки, он должен видеть всю ситуацию на расстоянии, он должен правильно оценить её, сделать прогноз, имеет ли смысл стрелять, и только на основе такого анализа он должен действовать, т.е., стрелять в утку. Он не может ожидать, пока утка коснётся его (чтобы сработал его рецептор «Х») и тогда он мог бы в неё выстрелить. Он должен сначала выделить утку как нужный объект на фоне других ненужных объектов, затем измерить расстояние до утки, пускай даже и «на глаз». Он делает это с помощью своего специального анализатора (зрительного), который не является рецептором «Х» или «У», а является дополнительным рецептором «С» (дополнительные специальные дистанционные рецепторы с афферентными путями). Такими рецепторами могут быть любые рецепторы, которые могут получать информацию на расстоянии – хемо-, тепло-, фоторецепторы и т.д. Зрительный анализатор охотника включает в себя фоточувствительные палочки и колбочки в глазу (фоторецепторы), зрительные нервы и различные мозговые структуры. Он должен распознать все окружающие предметы, классифицировать их и на их фоне выделить и определить местоположение утки (оценка ситуации). Кроме того с помощью реципрокной иннервации он должен так расположить своё тело, чтобы ружьё было направлено точно в то место впереди утки (упреждение), чтобы выполнить свою цель – попасть в утку. Всё это он делает с помощью своего дополнительного анализатора, который является анализатором-классификатором.
Игра рыбьих косяков и даже дельфиньих стай в окрестностях плывущего боевого корабля не может повлиять на его движение в целевое место назначения. Но «игра» вражеской подводной лодки в его окрестностях может очень существенно повлиять на выполнение его цели. Боевой корабль должен уметь видеть всё его окружение, выделить из всех возможных ситуаций, которые могут быть исходя из внешней ситуации, только те, которые могут создать такие внешние воздействия на него, которые могут помешать выполнению его цели. А для этого он должен «знать» возможные варианты ситуаций, которые могут повлиять на выполнение цели данной системы. Для этого он должен иметь «базу знаний» (классификацию объектов и ситуаций), в которой содержится описание всех тех ситуаций, которые могут оказать влияние на выполнение цели. Если в его «базе знаний» нет описания каких-либо объектов или ситуаций, то он не сможет распознать (классифицировать) эти объекты или ситуации и не сможет принять верное решение.
В «базе знаний» должна сохраняться информация не о параметрах внешнего воздействия, которые хранятся в «базе данных», а о ситуациях вокруг (вне) системы, которые могут привести к специфическому внешнему воздействию. «База знаний» может быть внедрена в блок управления в момент его «рождения» или внесена позже вместе с уставкой, причём внедряется в данный блок внешними системами по отношению к данной системе. Если в его «базе знаний» нет описания данной ситуации, он не сможет её распознать и классифицировать. «База знаний» содержит описание различных ситуаций и значимость этих ситуаций для системы. Зная значимость реальной ситуации для достижения цели система сможет сделать прогноз и принять решение о своих действиях в зависимости от прогноза.
Кроме «базы знаний» у него также должна быть и «база решений» – набор готовых решений, принимаемых блоком управления в зависимости от ситуации и от прогноза. (уставные решения, инструкции), в которой хранятся соответствующие решениях, которые необходимо принимать в соответствующих ситуациях. Если у него нет готовых решений на внешнюю ситуацию, он не может выполнить свою цель. Определив ситуацию и выработав решение он задаёт уставку (уставка «М» на рис. 28) для простого анализатора, который соответствующим образом активирует стимулятор.
Таким образом, блок управления усложняется за счёт включения как надстройки в его состав рецептора «С» и анализатора-классификатора, содержащего «базу знаний» и «базу решений» (рис. 28). Потому такие блоки управления называются сложными. Чем сложнее блок принятия решений, тем точнее может быть выбрано решение.
Следовательно, сложный блок управления включает в себя анализатор-контактор, который имеет «базу данных», и анализатор-классификатор, который имеет «базу знаний» и «базу решений».
Не любая живая клетка обладает анализатором-классификатором. В классификации живого мира есть две крупнейшие группы – мир растений и мир животных. Растения, как и многие другие субъекты живого мира, такие как кораллы или бактерии, не обладают дистанционными рецепторами, хотя, в некоторых случаях, может создаться впечатление, что всё же у растений такие рецепторы есть. Например, подсолнечник поворачивает свои головки в сторону солнца, как-будто бы у него есть фототаксис. Но он поворачивает головку фактически не в сторону света, а в ту сторону, где больше нагревается его тело, а тепло идёт со стороны света. Тепло ощущается локально самим телом подсолнечника. Специальных инфракрасных рецепторов у него нет. Процесс же фотосинтеза не является процессом фототаксиса.
Поэтому растения являются системами с простым блоком управления. И хотя есть очень сложно устроенные растения, способные даже питаться субъектами животного мира, всё равно их блок управления является простым, реагирующим только на прямой контакт. Например, росянка питается насекомыми, она может заманить их к себе, приклеить к своему наружному желудку и даже сократить его створки. Она хищник и в этом она похожа на волка, акулу или медузу. Она может сделать много действий, подобно животному, но всё это она может делать только лишь после того, как насекомое сядет на неё. Росянка не может гоняться за своими жертвами, потому что она их не видит (нет дистанционных сенсоров) и у неё нет органов передвижения, хотя что-то, что сокращает её створки, у неё есть. Что бы ни село на неё, даже если это будет маленький камешек, она проделает все необходимые действия и попытается переварить его, потому что у неё нет анализатора-классификатора. Поэтому росянка растение, а не животное.
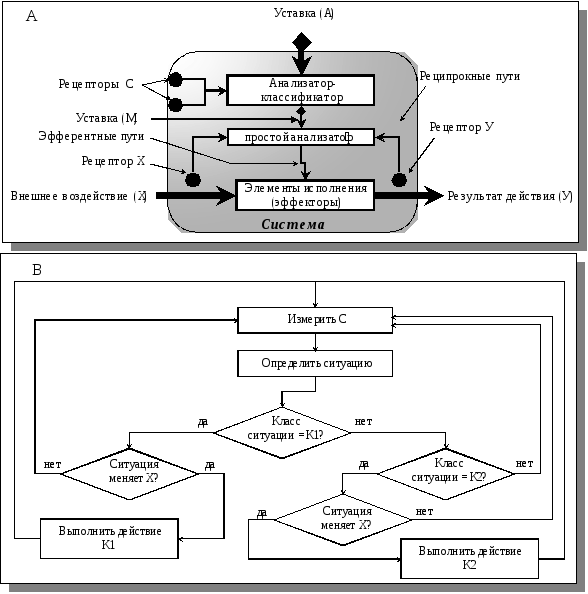
Рис. 28. Сложный блок управления (А) и алгоритм его работы (В).
«База знаний» определяется числом классов ситуаций, а «база решений» – числом действий, которые «знает» блок управления.
Клетки животных, включая одноклеточных, типа амёбы или инфузории, являются уже системами с сложными блоками управления, потому что обладают как минимум одним из пространственных анализаторов – хемотаксисом. У таких систем кроме понятия о времени есть также понятие и о пространстве. Чтобы иметь это понятие необходимо иметь как органы для его видения, так и органы для передвижения в нём. Наличием дистанционных сенсоров животная клетка отличается от любых объектов растительного мира, у которых таких сенсоров нет. Поэтому блок управления является определителем, к какому миру принадлежит данный живой объект. Медуза не является водорослью, а является животным, потому что у неё есть хемотаксис и у неё есть органы передвижения в пространстве. Дистанционный анализатор даёт представление о пространстве, в котором нужно передвигаться. Поэтому растения стоят на месте, а животные двигаются в пространстве.