

Гайдес М.А. - Общая теория систем. (Системы и системный анализ)
.docЦикл работы идеальной простой и составной СФЕ складывается из микроциклов (рис. 9):
-
восприятие и селекция внешнего воздействия рецептором «X» и принятие решения
-
воздействие на исполнительные элементы (СФЕ)
-
срабатывание исполнительных элементов (СФЕ)
-
прекращение функции.
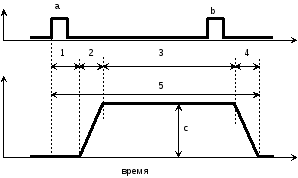
Рис. 9. Полный цикл и микроциклы блока управления простой и составной СФЕ.
a – внешнее воздействие на которое СФЕ начинает реагировать; b – внешнее воздействие, на которое СФЕ не реагирует, потому что находится в рефрактерном состоянии (не может активировать исполнительные элементы, потому что они уже активированы); с – амплитуда результата действия СФЕ на графике функции СФЕ.
1 – восприятие и селекция внешнего воздействия рецептором “X” после начала внешнего воздействия и принятие решения; 2 – активация элементов исполнения; 3 – выполнение действия элементов исполнения; 4 – прекращение функции; 5 – полный цикл функции СФЕ.
После начала внешнего воздействия срабатывает рецептор «X» (1-й микроцикл). Затем уходит какое-то время на принятие решения, потому что это решение само является результатом действия определённых СФЕ, входящих в состав блока управления (2-й микроцикл). Затем активируются (включаются) все СФЕ (3-й микроцикл). Время срабатывания СФЕ зависит от скорости утилизации энергии, затраченной на действие СФЕ, например, от скорости сокращения саркомера в мышечной клетке и которое определяется скоростью биохимических реакций в мышечной клетке. После этого все СФЕ прекращают свою функцию (4-й микроцикл). При этом СФЕ полностью затрачивает на своё действие всю ту энергию, которую она имела и могла использовать на это действие. А так как очередность действий и результат действия всегда одни и те же, то и эта мера энергии всегда одна и та же (квант энергии). Чтобы СФЕ снова могла совершить новое действие, её нужно снова «зарядить» энергией. На это также может уходить время (время зарядки энергией, на графике не показано, потому что это график работы только блока управления, а не исполнительных элементов). Как это происходит будет рассмотрено в разделе, посвященном пассивным и активным системам, см. далее).
У любой СФЕ цикл её деятельности складывается из этих микроциклов. Поэтому её время цикла (5 на рис. 9) работы всегда одинаковое и равно сумме этих микроциклов. Если СФЕ начала свои действия, она не остановится, пока не завершит свой полный цикл. В этом причина неуправляемости любых СФЕ в процессе их срабатывания (абсолютная рефрактерность) – внешнее воздействие может быстро закончиться и снова начаться (b на рис. 9), но если СФЕ уже работает, то пока она не закончит свои действия от первого внешнего воздействия, она не остановится и не будет реагировать на новое внешнее воздействие.
В реальных составных СФЕ к этим микроциклам могут добавляться дополнительные микроциклы, обусловленные несовершенством реальных объектов, например, несинхронностью срабатывания элементов исполнения из-за их неодинаковости.
Отсюда видно, что даже простейшие системы, каковыми являются СФЕ, срабатывают не сразу и пока появится их результат действия им требуется какое-то время. Этим объясняется инерционность систем, которую можно измерить, используя параметр постоянной времени. Но это, вообще говоря, не инерционность, а транзиторная, или, другими словами, проходящая инертность объекта (рефрактерность), его неспособность отвечать на внешнее воздействие в определённые фазы своего действия. Истинная инерционность объясняется независимостью результата действия от системы его произведшей (см. ниже).
Постоянная времени – это время между началом внешнего воздействия и готовностью к новому внешнему воздействию после выработки результата действия.
Аналогом составных СФЕ являются все объекты, которые действуют подобно лавине. В таких случаях работает «принцип домино». Было одно воздействие и всё падает. Но число падений равно числу СФЕ. Если толкнуть одну костяшку домино, от падения будет только один щелчок. Если толкнуть ряд стоящих костяшек домино, будет столько щелчков, сколько костяшек домино стояло в ряду.
Биологическим аналогом составных СФЕ являются, например, функциональные единицы вентиляции (ФЕВ), каждая из которых состоит из большой группы в несколько сот альвеол, одновременно включающихся в процесс вентиляции или отключающихся от неё. Ацинусы в печени, сосудистые сегменты брыжейки, тканевые сосудистые функциональные единицы и пр., также являются аналогами составных СФЕ.
Следовательно, любые СФЕ функционируют по закону «всё или ничего». СФЕ так устроена, что она либо ничего не делает, либо выдаёт максимум результата действия. Её элементарный результат действия – либо он есть, либо его нет. Может быть СФЕ, которая выдаёт результат действия, например, в два раза больший, чем результат действия другой СФЕ. Но он всегда будет в два раза больший.
Каждый результат действия простой СФЕ является квантом действия (неделимой порцией), причём максимальным для данной СФЕ. Неделимым потому, что СФЕ не может выдать часть своего результата действия, например, половину. А раз «неделимой порцией», то не может быть градации. СФЕ может быть, например, открыта или закрыта, давать электрический ток, или не давать, секретировать что-либо или не секретировать, и т.д. Но она не может регулировать количество результата своего действия, потому что её результат всегда либо отсутствует, либо максимальный.
Такой режим работы очень грубый, не точный и не выгодный как для самой СФЕ, так и для её цели. Представим себе, что в нашем автомобиле вместо руля будет устройство, которое будет сразу максимально сворачивать вправо, если мы повернём руль направо, или максимально влево, если мы повернём налево. Вместо плавной и точной подстройки под заданный курс движения автомобиль будет резко метаться справа налево. И цель не будет достигнута, и автомобиль будет разрушен.
В принципе составная СФЕ могла бы дать градуированный результат действия, потому что у неё есть несколько СФЕ, которые она могла бы включать в разной последовательности. Но такая система не может сделать этого, потому что не «видит» свой результат действия и не может его сравнить с тем, что должно быть. У неё для этого нет соответствующих элементов.
Выводы:
-
простая СФЕ является объектом, который состоит из двух типов элементов:
-
элементов исполнения, которые отвечают за качество самого результата действия – эффекторов
-
блока управления, который управляет действиями эффекторов (ППС, анализатор-контактор и стимулятор, активирующий элементы исполнения)
-
действия эффекторов осуществляются строго в соответствии с алгоритмом, заложенным в блок управления либо изначально, в момент его «рождения», либо вводимого через вход уставки
-
есть два вида простой СФЕ – неуправляемая и управляемая.
-
неуправляемая СФЕ срабатывает только от внешнего воздействия и её действия не зависят от внешних управляющих сигналов
-
для срабатывания управляемой СФЕ дополнительно необходим ещё сигнал внешнего разрешения на входе уставки и её действия зависят от внешних управляющих сигналов
-
блок управления управляемой СФЕ, как и у неуправляемой СФЕ, состоит из анализатора-информатора и имеет только ППС (информатор «Х» и афферентные пути), но ещё есть вход уставки, а блока управления неуправляемой СФЕ входа уставки нет
составная СФЕ является таким же объектом, как и простая СФЕ, но результат её действия усиленный
-
блок управления составной СФЕ тоже простейший, имеет только ППС и анализатор-контактор.
-
она также работает по закону «всё или ничего» и качество её реакции обусловлены типом её простых СФЕ, а количество её реакции (величина её результата действия) равно сумме квантов действий тех простых СФЕ, которые её составляют
-
составные СФЕ также могут быть управляемыми и неуправляемыми, и различие между ними только в наличии входа уставки в общий блок управления, через который в него подаётся разрешение на выполнение действия.
Регуляция количества результата действия.
Для достижения заданной цели только задания качества результата действия недостаточно. Цель задаёт не только «какое действие должен» сделать объект (качество результата действия), но и «сколько этого действия» должен сделать данный объект (количество результата действия). И система должна стремиться выполнить специфическое действие ровно столько, сколько нужно, ни больше и ни меньше. Качество действия определяется типом СФЕ. Количество определяется количеством СФЕ.
Есть три количественные характеристики результата действия – максимум, минимум и оптимум количества действия. Оптимум – это что-то между максимумом и минимумом. В реальном мире от реальных систем требуется оптимум количества действия, т.е., градация их результатов действия. Поэтому в работе системы должен быть не максимум и не минимум, а оптимум.
Оптимум, это функционирование по принципу – необходимо и достаточно. Результат действия необходимо должен быть таким, а не другим по качеству, и достаточным по количеству, ни больше и не меньше. Отсюда, СФЕ не могут быть полноценными системами, потому что они выдают только неделимый квант действия. Необходимы системы, у которых возможна регулируемая градация результата действия.
Например, требуется, чтобы в тканевых капиллярах было давление 10 мм Hg. Этой фразой сразу задаётся всё, что содержится в понятии «необходимо и достаточно». Необходимо... давление, и достаточно... 10 мм Hg. Можно подобрать СФЕ, которая даёт давление, но не 10 мм Hg, а, например, 100 мм Hg. Это слишком много. Вероятно, можно подобрать СФЕ, которая может давать давление 10 мм Hg и в данный момент этого достаточно. Но если ситуация вдруг изменилась и уже требуется 100 мм Hg, а не 10 мм Hg, тогда что делать? Снова «бегать» и искать СФЕ, которая может давать 100 мм Hg? А нельзя ли сделать такую систему, которая могла бы давать любые давления в диапазоне, например, от 0 до 100 мм Hg, в зависимости от ситуации?
Чтобы давать то количество результата действия, которое необходимо в данный момент, необходима градация результатов действия систем. Это можно было бы достичь путём построения систем из набора однотипных СФЕ по типу блок-схемы составной СФЕ. У неё есть то, что необходимо для градуировки результата действия – она содержит много СФЕ. Если сделать так, чтобы можно было включать в действие от одной до всех СФЕ, в зависимости от потребности, то результат действия будет иметь столько градаций, сколько СФЕ есть в системе. Чем больше точности требуется, тем более мелкие градации результата действия должны быть. Поэтому, вместо одной СФЕ с её предельно большим результатом действия нужно использовать столько СФЕ с маленькими результатами действия, сумма которых равна требуемому максимуму, а точность выполнения цели равна результату действия одной СФЕ. Если включать в действие то число СФЕ, сумма результатов действия которого достаточна для выполнения задания, то цель будет достигнута.
Но у составной СФЕ нет возможности регулировать свой результат действия, потому что у неё нет органа, который делал бы это. У неё есть много СФЕ, но нет органа, который бы знал, какое количество из них нужно включить в функцию. Для того, чтобы выдать результат действия в точности равный заданному, его (результат действия) нужно постоянно измерять и сравнивать данные измерений с заданием (с уставкой, с «базой данных»).
«База данных» – это список тех должных величин результата действия, которые система должна выдать в зависимости от величины внешнего воздействия. Цель системы – каждому значению измеренного внешнего воздействия должна соответствовать строго определённая величина результата действия (должная величина).
Для этого нужно «видеть» (измерять) результат действия системы, чтобы сравнивать его с должным. А для этого у блока управления должен быть рецептор «У», который может измерять результат действия, должна быть линия связи (реципрокные пути), по которым информация с рецептора «У» идёт в особый анализатор-эффектор, функцию которого, возможно, смог бы выполнять тот же анализатор-контактор или отдельный анализатор, и где результат этого измерения должен сравниваться с тем, что должно быть (с «базой данных»). Блок управления системы должен определить величину внешнего воздействия, выбрать из «базы данных» должную величину результата действия в соответствии с величиной внешнего воздействия и сравнить эту должную с собственным (актуальным) результатом действия, чтобы увидеть его соответствие (несоответствие) должной величине. Выбрать из «базы данных» должную величину результата действия в соответствии с величиной внешнего воздействия составная СФЕ ещё может, потому что у неё есть ППС. А сравнить должную величину с результатом собственного действия составная СФЕ уже не может, потому что у неё нет ничего, что может это сделать, нет соответствующих элементов.
Простой блок управления (отрицательная обратная связь).
Чтобы блок управления системы мог «увидеть» (почувствовать и измерить) результат действия системы, он должен иметь соответствующий рецептор «У» на выходе системы и линию связи между ним и рецептором «У» (реципрокный путь).
Логика работы такого управления заключается в том, что если результат действия больше заданного, то нужно его уменьшить, активировав меньшее число СФЕ, если меньше – то увеличить, активировав больше число СФЕ. Поэтому такая связь называется отрицательной. А так как информация движется обратно, от выхода системы в сторону её начала, она называется обратной. В итоге получается отрицательная обратная связь (ООС). В зависимости от потребности и на основе информации ОСС блок управления системы по мере необходимости должен включать или выключать функции управляемых СФЕ (рис. 10).
ООС реализуется с помощью петли ООС, которая включает в себя рецептор «У», реципрокный путь, по которым информация с рецептора «У» переносится в анализатор-контактор или отдельный анализатор-эффектор, сам анализатор и эфферентные пути, через которые решения блока управления передаются на эффекторы (управляемые СФЕ). Анализаор, который включает в себя анализатор-контактор и анализатор-эффектор является простым анализатором.
Следовательно, система, в отличие от СФЕ, содержит как ППС, так и ООС. Прямая управляющая связь активирует систему, а отрицательная обратная связь определяет число активированных СФЕ.
А В С
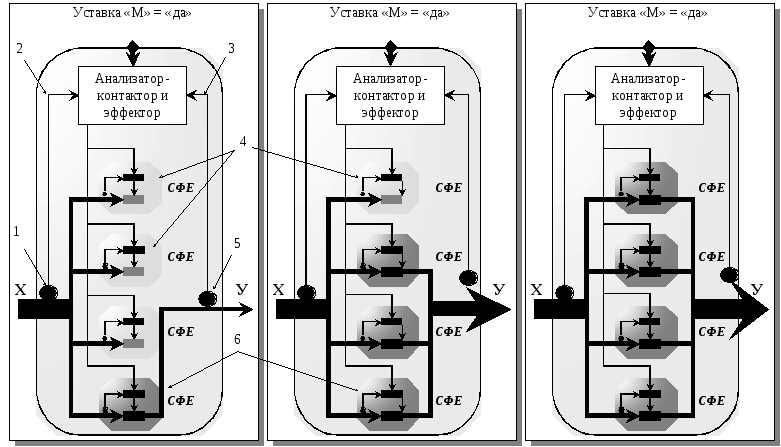
Рис. 10. Отрицательная обратная связь. (Блок-схема системы с простым блоком управления)
Отличие данной системы от составной СФЕ только в наличии рецептора «У», который измеряет результат действия, и реципрокных путей, по которым информация передаётся с этого рецептора в анализатор (ООС). А – активна одна СФЕ, В – активны три СФЕ, С – активны все СФЕ. Число активных СФЕ определяется ОСС.
1 – рецептор "Х"; 2 – ППС.; 3 – ООС; 4 – неактивные СФЕ; 5 - рецептор «У» для измерения результата действия системы; 6 – активные СФЕ.
Блок управления, содержащий ППС и петлю ООС, является простым. Алгоритм работы простых блоков управления не отличается большой сложностью (рис. 11). Петля ООС постоянно отслеживает результат действия исполнительных элементов (СФЕ). Если результат действия получается больше, чем задано, нужно его уменьшить, если результат меньше заданного – нужно его увеличить. Через уставку задаются параметры управления («база данных»), например, каким должно быть соотношение между внешним воздействием и результатом действия, или какой уровень результата действия нужно постоянно удерживать и т.д. При этом максимальной точностью будет результат действия одной СФЕ (квант действия).
Например, если в лёгких будет открыто больше альвеолярных капилляров, чем есть альвеол с подходящим газовым составом, то артериализация венозной крови будет неполной, и нужно закрыть ту часть альвеолярных капилляров, которые «омывают» кровотоком альвеолы с неподходящим для газообмена газовым составом. Если их будет открыто меньше, будет перегрузка лёгочного кровообращения, давление в лёгочной артерии возрастёт и нужно открыть часть альвеолярных капилляров. В любом случае срабатывает информатор лёгочного кровообращения и блок управления решает, сколько капилляров нужно открыть или закрыть. Отсюда, диффузионная часть сосудистого русла лёгких является системой, содержащей простой блок управления.
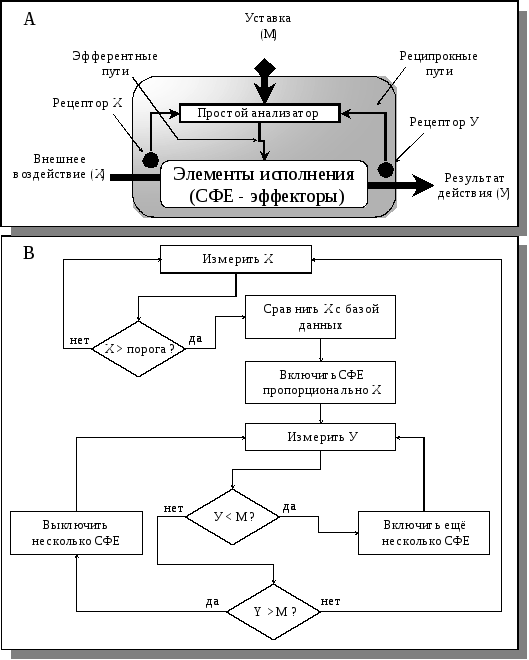
Рис. 11. Простой блок управления систем с ООС (А) и алгоритм его работы (В) .
Число включаемых или выключаемых СФЕ в петле ООС зависит от глубины ООС. Если в цикле ООС будут включаться или выключаться по одной СФЕ, подстройка будет наиболее плавной и точной, но и наиболее медленной. Если по несколько СФЕ, то чем больше СФЕ будет участвовать в одном цикле переключения ООС, тем быстрее будет подстройка, но и тем менее она будет точной. В последнем случае возможны переходные процессы (см. далее).
Блок управления системы кроме информатора «Х» также содержит и информатор «У» (ОСС). Поэтому у него есть информация и о внешнем воздействии, и о результате действия. Небольшое усложнение блока управления приводит к очень существенному результату. Причина усложнения – необходимость получения оптимально точного выполнения результата действия системы для достижения цели. ООС даёт возможность регуляции количества результата действия, т.е., система с ООС может оптимально выполнить любое необходимое действие, от минимума до максимума с точностью до одного кванта действия.
Системы с ООС, как и составные СФЕ, также содержат два типа объектов:
-
элементы исполнения (СФЕ) (эффекторы, которые выполняют специфические действия для достижения заданной генеральной цели системы)
-
простой блок управления (ППС и петля ООС)
Вообще говоря, в любой реальной системе есть ещё и третий тип объектов: элементы обслуживания – вспомогательные элементы, без которых элементы исполнения не смогут работать. Например, у самолёта есть крылья для того, чтобы летать, но у него есть также и колёса, чтобы взлетать и садиться. Молекула гемоглобина содержит гем, который содержит 4 СФЕ (лиганды) и глобин – белок, который прямо не участвует в переносе кислорода, но без которого гем не сможет работать. Основной СФЕ системы внешнего газообмена является ФЕВ – функциональная единица вентиляции (функционально объединённая группа альвеол). Но без сервисных систем (системы вентиляции, распределения, очистки и кондиционирования воздуха и т.д.) ФЕВ не смогут нормально функционировать.
Мы слегка коснулись вопроса существования третьего типа объектов (элементов обслуживания) только для того, чтобы знать, что они всегда присутствуют в любой системе, но подробно рассматривать их функции мы не будем, чтобы не загромождать наши рассуждения. Отметим только, что они представляют такие же обычные системы с целью обслуживать другие системы и занимают своё место в иерархии системы.
Системы с ООС могут решать большинство задач намного лучше, чем простые или составные СФЕ. Наличие ООС почти не усложняет систему. Мы видели, что уже простая СФЕ является очень сложным образованием, включающим в себя множество компонентов. Составная СФЕ сложнее простой СФЕ на число раз, почти равное числу простых СФЕ в ней.
В системе с ООС добавляется всего лишь один рецептор и линия связи между рецептором и анализатором (реципрокный путь). Но эффект от такого изменения структуры блока управления очень большой и он зависит только от алгоритма работы блока управления. Любая СФЕ (простая и составная) может выполнить только максимум действия. Системы с ООС уже могут дать оптимум результата действия, от минимума до максимума, являются точными и стабильными. Их точность зависит только от величины кванта действия отдельной СФЕ и глубины ООС (см. ниже). Стабильность обусловлена тем, что система постоянно «видит» свой результат действия, может сравнивать его с должным и исправлять его, если есть расхождение. В реальных системах всегда есть причины для расхождения, потому что они существуют в реальном мире, где всегда есть возмущающие воздействия. Отсюда видно, что именно ООС превращает СФЕ в настоящие системы.
Каким образом блок управления управляет системой? Какие параметры его характеризуют? Любой блок управления характеризуется тремя параметрами ППС и столько же параметров петли ООС. Для ППС это:
-
минимальным уровнем контролируемого входного воздействия (порог чувствительности)
-
максимальным уровнем контролируемого входного воздействия (диапазон чувствительности входного воздействия)
-
временем включения управления (временем принятия решения)
Для петли ООС это:
-
минимальным уровнем контролируемого результата действия (порог чувствительности петли ООС - глубина ООС)
-
максимальным уровнем контролируемого результата действия (диапазон чувствительности результата действия)
-
временем включения управления (временем принятия решения)
Минимальный уровень контролируемого входного сигнала для ППС – это порог чувствительности сигнала рецептора «Х», начиная с которого анализатор-контактор распознаёт, что внешнее воздействие уже началось. Например, если рО2 достигло 60 мм Hg, то должен быть открыт сфинктер (срабатывает 1 СФЕ), если меньше – закрыт. Любые значения рО2, меньшие чем 60 мм Hg не приведут к открытию сфинктера, потому что они подпороговые. Следовательно, 60 мм Hg являются порогом срабатывания сфинктера.
Максимальный уровень контролируемого входного сигнала (диапазон) для ППС – это уровень сигнала о внешнем воздействии, при котором срабатывают все СФЕ. На дальнейшее увеличение входного сигнала система уже не может реагировать увеличением своей функции, потому что у неё нет больше резервов СФЕ. Например, если рО2 достигло 100 мм Hg, то должны быть открыты все сфинктеры (срабатывают все СФЕ). Любые значения рО2, большие чем 100 мм Hg не приведут к открытию дополнительных сфинктеров, потому что они все уже открыты. Следовательно, 60-100 мм Hg являются диапазоном срабатывания системы сфинктеров.
Время включения ППС – промежуток времени между началом внешнего воздействия и началом срабатывания системы. Система никогда не срабатывает мгновенно после появления внешнего воздействия. Пока рецепторы почувствуют сигнал, пока анализатор-контактор примет решение, пока эффекторы передадут управляющее воздействие на входы уставок исполнительных элементов, на всё это уходит время.
Минимальный уровень контролируемого выходного сигнала для ООС – это порог чувствительности сигнала рецептора «У», начиная с которого анализатор-эффектор распознаёт, что есть расхождение между результатом действия системы и его должной величиной. Расхождение должно быть равно или больше кванта действия одиночной СФЕ. Например, если должен быть открыт один сфинктер и кровоток должен быть минимальным (один квант действия), а на самом деле открыто два сфинктера и кровоток в два раза больше (два кванта действия), то рецептор «У» должен почувствовать лишний квант. Если он может это сделать, то его чувствительность равна одному кванту. Чувствительность определяется глубиной ООС.
Глубина ООС – это число квантов действия одиночных СФЕ системы, сумма которых распознаётся как расхождение между актуальным результатом действия и должным. Задаётся уставкой. Максимально большой глубиной ООС является чувствительность расхождения в один квант действия одиночной СФЕ. Чем меньше глубина ООС, тем меньше чувствительность, тем она более «грубая». Т.е., чем меньше глубина ООС, тем большее расхождение результата действия с должным воспринимается как расхождение. Например, уже два (три, десять и т.д.) кванта действия двух (трёх, десяти и т.д.) СФЕ воспринимается как расхождение. Минимальной глубиной ООС является её отсутствие. В этом случае любое расхождение результата действия с должным не воспринимается блоком управления как расхождение. Результат действия будет максимальным и система с простым блоком управления с нулевой глубиной ООС превращается в составную СФЕ с ППС (с простейшим блоком управления).
Например, система микроциркуляции БКК в тканевых капиллярах должна держать среднее давление 100 мм Hg с точностью до 1 мм Hg. При этом среднее артериальное давление может колебаться от 80 до 200 мм Hg. Величина «100 мм Hg» определяет уровень контролируемого результата действия. Величина «от 80 до 200 мм Hg» диапазон контролируемого внешнего (входного) воздействия. Величина «1 мм Hg» определяется глубиной ООС. Меньшая глубина ООС будет контролировать параметр с меньшей точностью, например с точностью до 10 мм Hg (более грубо) или 50 мм Hg (ещё грубее), а большая глубина ООС – с большей точностью, например с точностью до 0.1 мм Hg (более тонко). Максимальная чувствительность ООС ограничена величиной кванта действия СФЕ, входящих в состав системы и глубиной ООС. Но в любом случае если происходит расхождение уровня контролируемого параметра с заданным более, чем на величину заданной точности, петля ООС должна «почувствовать» это расхождение и «заставить» исполнительные элементы действовать таким образом, чтобы расхождение цели и результата действия исчезло.
Максимальный уровень контролируемого выходного сигнала (диапазон) для ООС – это уровень сигнала о результате действия системы, при котором срабатывают все СФЕ. На дальнейшее увеличение расхождения система же не сможет реагировать увеличением своей функции, потому что у неё нет больше резервов СФЕ.
Время включения управления ООС – промежуток времени между началом расхождения сигнала о результате действия с целевым и началом срабатывания системы.
Все эти параметры могут быть «встроены» в ППС и в петли ООС изначально (уставка вводится при их «рождении») и в дальнейшем они уже не меняются. Либо могут быть введены с уставкой позже и эти параметры можно менять путём ввода извне новой уставки. Для этого должен быть канал ввода уставки. Сам же простой блок управления самостоятельно не может менять ни один из этих параметров.
Абсолютно у всех систем есть блок управления, но не всегда его можно явно обнаружить. У самолёта или космического корабля этим блоком является бортовой компьютер – коробка с электроникой. У человека и других животных таким блоком является головной мозг, или, как минимум, нервная система. Но где блок управления у растения, или у бактерии? Где блок управления у атома или молекулы, или, например, блок управления у гвоздя?