

2.2.2 Принцип Даламбера
В XVIIIв. в работах Ж.-Л. Даламбера, Я. Германа и Л. Эйлера были заложены основы динамики несвободного движения, т. е. динамики движения механических систем, стесненных связями.
П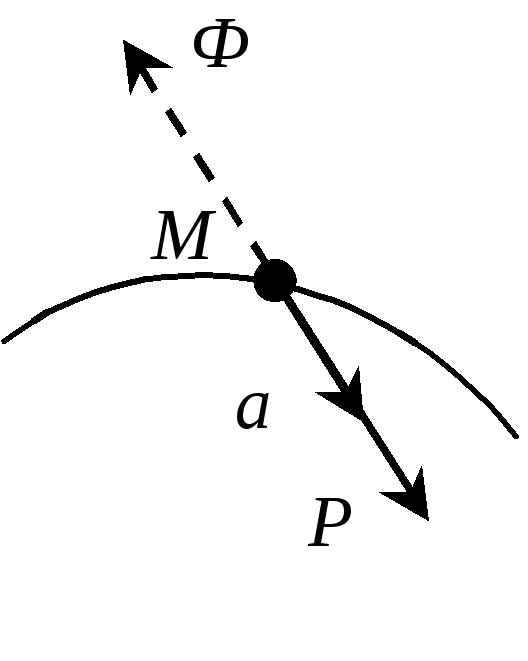 режде
всего, изложим принцип Даламбера для
одной свободной материальной точки.
Рассмотрим материальную точку
режде
всего, изложим принцип Даламбера для
одной свободной материальной точки.
Рассмотрим материальную точку
![]() ,
которая находится под действием
активной силы
,
которая находится под действием
активной силы
![]() (рис. 2.28).
(рис. 2.28).
Рис. 2.28 Модель движения материальной точки
Согласно второму закону Ньютона,
![]() .
.
Перенесем член
![]() из левой части уравнения в правую и
введем понятие силы инерции
из левой части уравнения в правую и
введем понятие силы инерции
![]() ,
тогда получим
,
тогда получим
![]() ,
,
или
![]() .
(2.43)
.
(2.43)
Полученное соотношение (2.43) формулируется следующим образом: геометрическая сумма приложенной к телу активной силы и силы инерции равна нулю в каждый момент времени.
Это означает, что для решения
задач динамики материальной точки на
основе принципа Даламбера необходимо
помимо приложенной к точке M
активной силы
![]() приложить к этой же точке силу инерции
приложить к этой же точке силу инерции
![]() ,
обусловленную ее ускоренным движением.
Уравнение (2.43) по форме совпадает с
уравнениями статики и выражает
уравновешенность сил
,
обусловленную ее ускоренным движением.
Уравнение (2.43) по форме совпадает с
уравнениями статики и выражает
уравновешенность сил
![]() и
и
![]() в каждый момент времени.
в каждый момент времени.
При изучении движения несвободной материальной точки применяют аксиому освобождаемостиот связей (была сформулирована в предыдущем праграфе), согласно которой связи, ограничивающие движениеточки, могут быть отброшены и заменены силами реакций связей таким образом, чтобы состояниеточки не изменилось.
Основное уравнение динамики для несвободной материальной точки Мпримет вид
![]()
или
![]() ,(2.44)
,(2.44)
где ![]() – активная сила;
– активная сила;
![]() – реакция связей;
– реакция связей;
![]() – сила инерции.
– сила инерции.
Уравнение (2.44) показывает,
чтов любой момент времени геометрическая
сумма активной силы, силы реакции связей
и силы инерции для несвободной материальной
точки равна нулю.Это положение
называется принципом Даламбера для
несвободной материальной точки.
Остановимся более подробно на понятии
силы инерции. Рассмотрим тело
![]() ,
которое лежит на гладкой горизонтальной
плоскости (рис. 2.29).
,
которое лежит на гладкой горизонтальной
плоскости (рис. 2.29).

Рис. 2.29 Модель движения тела по гладкой горизонтальной плоскости
Вес тела
![]() уравновешивается реакцией плоскости
уравновешивается реакцией плоскости
![]() .
Если телу сообщают ускорение
.
Если телу сообщают ускорение
![]() с помощью нити
с помощью нити
![]() ,
действующей на тело с силой
,
действующей на тело с силой
![]() ,
то сила инерции
,
то сила инерции
![]() приложена к нити
приложена к нити
![]() .
Эту силу ощутит человек, который тянет
нить. Таким образом, сила инерции является
реальной силой, представляющей собой
противодействие материальной точки
изменению ее скорости и приложенной к
телу, сообщающему этой точке ускорение.
При неравномерном криволинейном движении
точки силу инерции
.
Эту силу ощутит человек, который тянет
нить. Таким образом, сила инерции является
реальной силой, представляющей собой
противодействие материальной точки
изменению ее скорости и приложенной к
телу, сообщающему этой точке ускорение.
При неравномерном криволинейном движении
точки силу инерции
![]() разлагают на две составляющие, направленные
по касательной к траектории и по главной
нормали (рис. 2.30).
разлагают на две составляющие, направленные
по касательной к траектории и по главной
нормали (рис. 2.30).
Полученные составляющие
![]() и
и
![]() называюткасательнойинормальной
силами инерции. Эти силы направлены
противоположно касательному и нормальному
ускорениям, поэтому
называюткасательнойинормальной
силами инерции. Эти силы направлены
противоположно касательному и нормальному
ускорениям, поэтому
![]() ,
,![]() .(2.45)
.(2.45)
Из кинематики известно, что
![]() ,
,
где ![]() – алгебраическая величина скорости
точки;
– алгебраическая величина скорости
точки;
![]() – радиус кривизны траектории.
– радиус кривизны траектории.
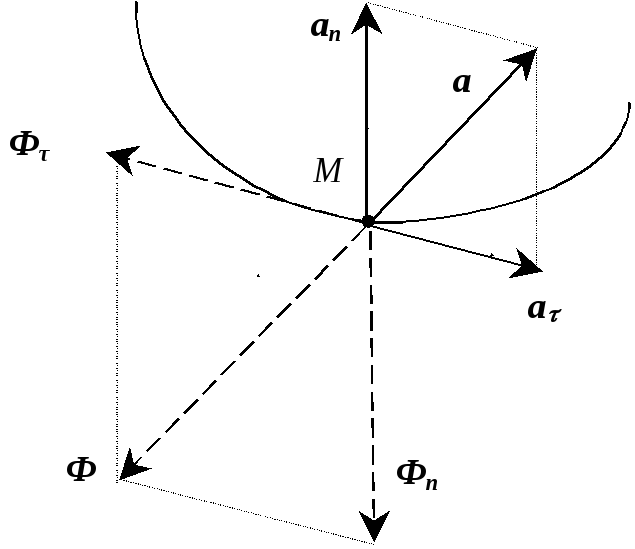
Рис. 3.30 Модель неравномерного криволинейного движения
Пользуясь этими выражениями, получаем абсолютные значения касательной и нормальной сил инерции:
![]() ,
,![]() .(2.46)
.(2.46)
Соотношение (2.45)естественным образом обобщается на случай системыnнесвободных материальных точекMi:
![]() , (i= 1,…,n),(2.47)
, (i= 1,…,n),(2.47)
где ![]() – активная сила, приложенная к точкеMi;
– активная сила, приложенная к точкеMi;
![]() – реакция связей, ограничивающих
движение точкиMi;
– реакция связей, ограничивающих
движение точкиMi;
![]() – сила инерции точкиMi.
– сила инерции точкиMi.
Складывая все
![]() уравнений(2.47), получим
уравнений(2.47), получим
![]() ,(2.48)
,(2.48)
где ![]() – главный вектор активных сил;
– главный вектор активных сил;
![]() – главный вектор реакций связей;
– главный вектор реакций связей;
![]() – главный вектор сил инерции точек
системы.
– главный вектор сил инерции точек
системы.
С учетом введенных обозначений (2.48)принимает вид
![]() , (2.49)
, (2.49)
т. е. в любой момент времени для всякой несвободной механической системы геометрическая сумма главных векторов активных сил, сил реакций связей и сил инерции материальных точек равна нулю.
Соотношение (2.49) представляет собой основу метода кинетостатики.