

4.4 Составление физико-математической модели механической
системы без трения (на примере путевой машины)
Физическое моделирование сил, перемещений и колебаний механической системы путевой машины можно реализовать на основе теории физического моделирования [4], основные принципы которой кратко могут быть сформулированы в следующем виде:
1. Подобные явления имеют одинаковые критерии физического подобия.
2. Всякое уравнение физического процесса может быть представлено в виде функциональной зависимости между критериями подобия.
3. Подобными явлениями будут те, которые имеют одинаковые определяющие критерии и подобные условия однозначности.
Основные критериальные соотношения для построения испытательного стенда и исследований на модели общей динамики путевой машины получить, используя метод анализа дифференциальных уравнений движения, так как движение данной механической системы имеет апробированное практикой математическое описание (см. уравнения 5.11). Представленная система дифференциальных уравнений движения имеют одинаковую структуру, что позволяет моделировать их по общему принципу. Рассмотрим, например, моделирование только двух движений подпрыгивания и галопирования путевой машины на рессорах с вязкостными демпферами линейного сопротивления:
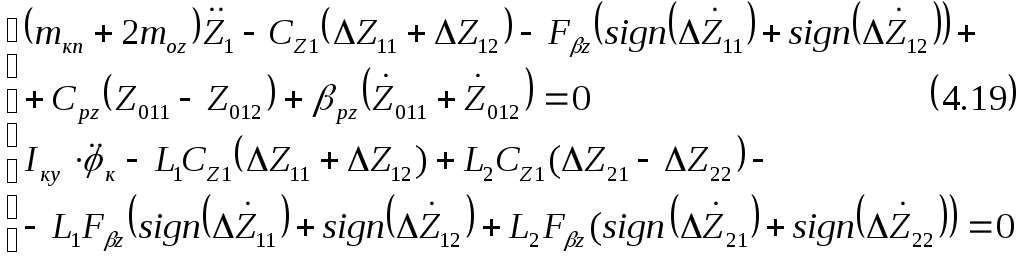
Для
упрощения одно из слагаемых в левой
части переносим в правую часть, например,
в первом
![]() и
и![]() во втором и делим на эти слагаемое все
члены соответствующего уравнения в
левой части уравнения системы.
во втором и делим на эти слагаемое все
члены соответствующего уравнения в
левой части уравнения системы.
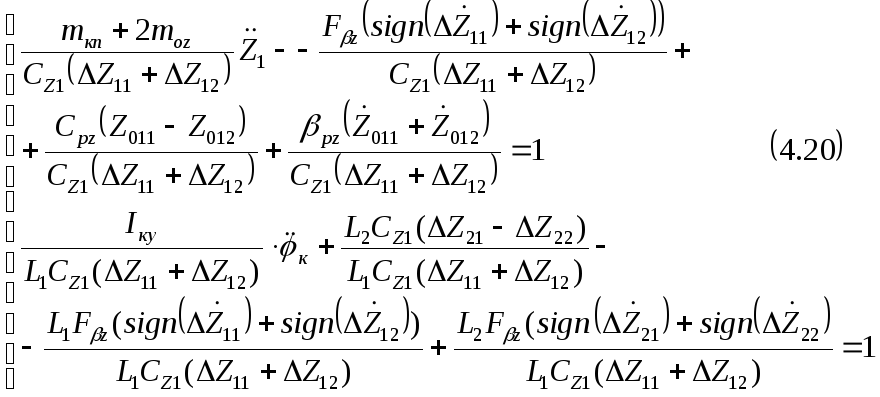
Таким образом, постановка и задачи эксперимента на основе теории подобия значительно упрощается, также в этих случаях находится функциональная связь между целыми комплексами величин, описывающими то или иное явление. Кроме того, в известных пределах имеется возможность распространения результатов единичного опыта на подобные системы, в том числе и геометрические уменьшенные модели.
В соответствии с теоремами подобия критерии подобия определяются путем приведения уравнений физического процесса к безразмерному виду. В соответствии с первой теоремой подобия – подобные явления имеют одинаковые критерии подобия. При этом под критерием подобия понимается безразмерный комплекс физических величин, определяющий тот или иной физический смысл. Следует также учитывать, что геометрически подобные тела и движения, тригонометрические функции при преобразованиях тождественно равны, так как имеют одинаковые углы. Обозначим уравнения, описывающие колебание путевой машины индексом «о» (оригинал), а его модели – «м» (модель).
Задача
построения модели образца заключается
в подборе её параметров
![]() таким образом, чтобы обеспечивалось
подобие процессов натурального подвижного
состава. Для нахождения этих условий
подобия необходимо привести уравнения
системы (4.20) к безразмерному виду.
таким образом, чтобы обеспечивалось
подобие процессов натурального подвижного
состава. Для нахождения этих условий
подобия необходимо привести уравнения
системы (4.20) к безразмерному виду.
Запишем уравнения движения путевой машины для оригинала и его модели. Для оригинала машины
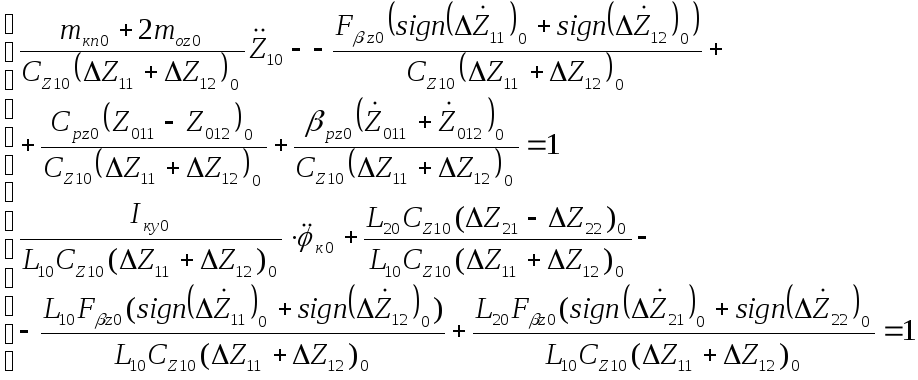 (4.21)
(4.21)
Уравнение движения для модели
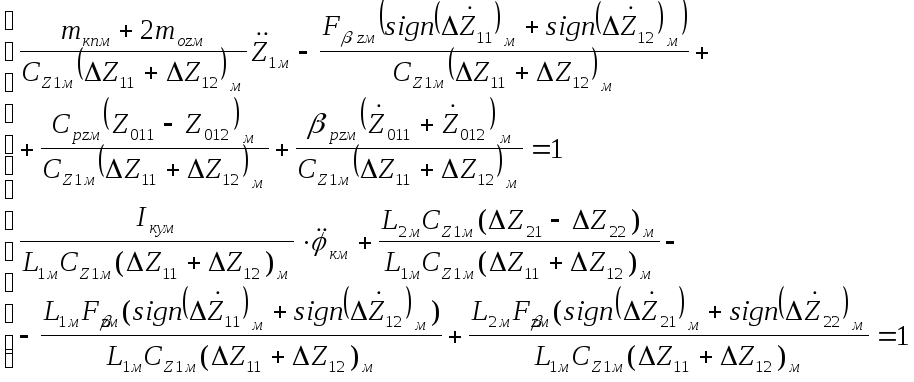 (4.22)
(4.22)
По условию построения модели с образца рассматриваемые системы должны быть подобны, а одинаковые физические величины должны иметь постоянные множители подобного преобразования или константы подобия.
![]() ;
;![]() ;
;![]() ;
;![]() ;
;
![]() ;
;![]() ;
;![]() ;
;![]()
Для того чтобы уравнение (4.21) было равно (4.22), необходимо переменные первой системы выразить через переменные второй системы, используя для этого преобразования постоянные множители подобного преобразования или константы подобия.
Для уравнения колебаний машины


Подставляя константы подобия в уравнение (4.22) получаем
Как можно видеть, уравнение (4.23) отличается от уравнения (4.20) тем, что перед каждой переменной величиной имеются комплексы, составленные из констант подобия. Отсюда можно сделать вывод, что переменные обеих систем могут быть определены одинаковым образом только при условии тождественности уравнений (4.23) и (4.20) а это возможно только тогда, когда комплексы, составленные из констант подобия в уравнении системы (4.23) сократятся.
На основании этого требования и учитывая, что в каждом из уравнений системы (4.23) получены одинаковые по содержанию комплексы (критерии подобия), согласно второй теоремы подобия интеграл дифференциальных уравнений, описывающих движение системы, можно представить как функцию от критериев подобия

Каждый из критериев подобия, входящих в критериальное уравнение, равен единице, то есть
![]()
Рассматривая члены этого соотношения попарно, получаем
![]() =
=![]() или после преобразований
или после преобразований![]() ,
(4.24).
,
(4.24).
С учетом
![]() индикатор подобия
индикатор подобия![]() в симплексной форме будет
в симплексной форме будет![]() .
Тогда индикатор подобия (4.24) можно
представить как
.
Тогда индикатор подобия (4.24) можно
представить как![]() ,
(4.25).
,
(4.25).
![]() =
=![]() откуда получаем
откуда получаем![]() ,
(4.26).
,
(4.26).
![]() =
=![]() тогда после преобразований
тогда после преобразований![]() =1,
(4.27).
=1,
(4.27).
Приравнивая (4.25) и
(4.26)
![]() получаем
получаем![]() (4.28), а, приравнивая (4.24) и (4.26) имеем
(4.28), а, приравнивая (4.24) и (4.26) имеем![]() откуда
откуда![]() .
.
Из
индикатора подобия
![]() с учетом полученного
с учетом полученного![]() имеем
имеем![]() ,
тогда из индикатора подобия
,
тогда из индикатора подобия![]() получаем
получаем![]()
Подставляя
полученное значение в
![]() имеем
имеем![]()
Тогда
подставив в (4.27) ранее полученные значения
масштабных коэффициентов перехода
получим
![]() .
.
Все введённые значения пересчитанных коэффициентов сведены в таблице 4.1
Таблица 5.1
Масштабные коэффициенты перехода
|
Наименование физических величин |
Обозначение пересчётного коэффициента |
|
1. Линейные размеры |
|
|
2. Скорость качения |
|
|
3. Время, период колебаний |
|
|
4. Сила |
|
|
5. Жесткость |
|
|
6. Масса |
|
|
7. Угол поворота |
|
|
8. Коэффициент вязкого сопротивления |
|
|
9. Потребляемая мощность |
|
Динамическое подобие узлов трения
(на примере пары трения «колесо – рельс»)
В единой системе испытательного комплекса «ВСП – путевая машина» для исследования динамических и тяговых характеристик путевых машин на их физических моделях узел сцепления «колесо – рельс» является одной из механических подсистем. Наличие поверхностей сцепления не позволяет рассматривать его как подсистему одного уровня. Это связано с тем, что в составе аналогичных конструкций, таких как муфта сцепления, тормоз, гаситель колебаний, выделяют механизм нагружения, ведущую и ведомые части, которые жесткостями связей и системой демпфирующих элементов связаны с механической системой путевой машины. Отмеченные конструктивные элементы составляют его механическую часть, подуровнем которой непосредственно являются поверхности сцепления.
Пару сцепления «колесо – рельс» следует рассматривать как подсистему, состоящую из двух уровней, в которой тело (колесо) и контртело (рельс), объединенные поверхностью сцепления, составляют ее механическую часть. Компонентами подсистемы являются их приведенные массы связанные своими жесткостями связей с соответствующей механической системой. Соответственно и графическое представление физической модели сцепления (см. рис.4.4 а, б).
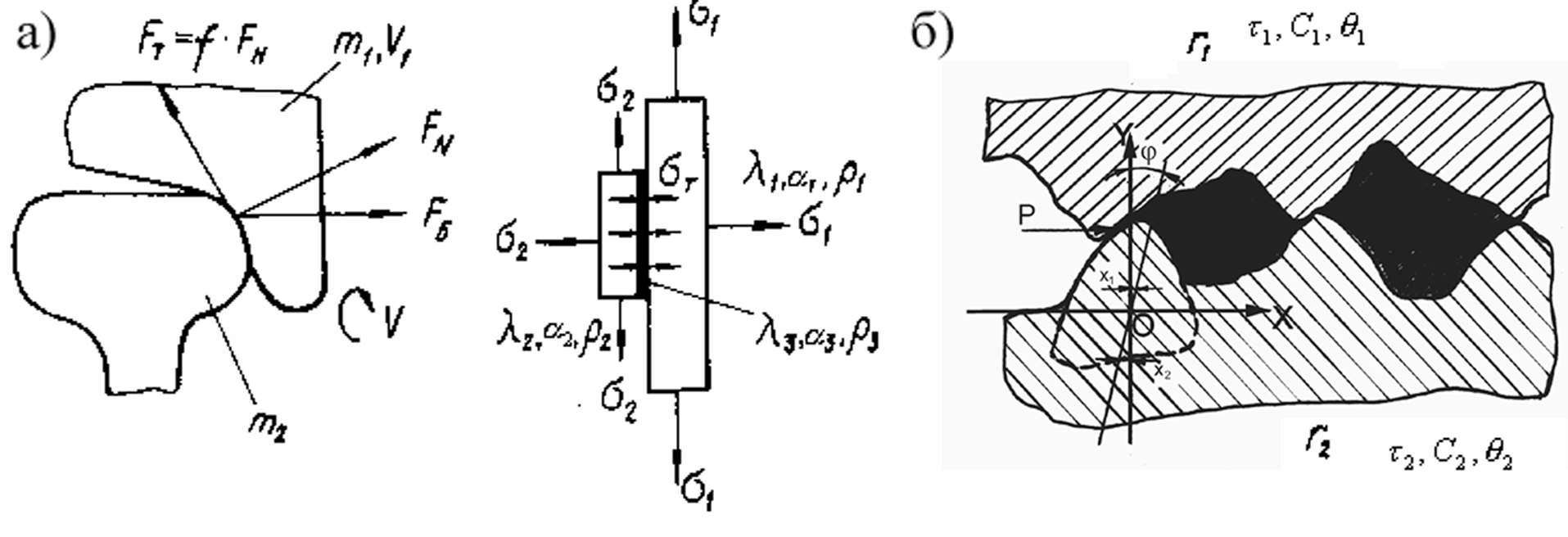
Рис.4.4 Модельное представление ФМС "колесо - рельс"
Если
в подсистеме механической части пары
сцепления (рис.4.4, а) формируются: параметры
режима (скорость V, нагрузка
![]() ),
теплоотдающие поверхности и объемы
теплопоглощения, массаm,
теплопроводность,
коэффициент теплоотдачи,
температуропроводность,
моменты инерции, твердость и т.д.), то в
подсистеме поверхности сцепления
(рис.4.4 б), формируются: параметры
неровностей (шероховатостей) контакта,
поверхностная температура контактаи температура вспышки
),
теплоотдающие поверхности и объемы
теплопоглощения, массаm,
теплопроводность,
коэффициент теплоотдачи,
температуропроводность,
моменты инерции, твердость и т.д.), то в
подсистеме поверхности сцепления
(рис.4.4 б), формируются: параметры
неровностей (шероховатостей) контакта,
поверхностная температура контактаи температура вспышки
![]() ,
напряженно-деформационное состояние
контакта, сопротивление касательным
усилиям,
амплитудно-фазо-частотные характеристики
процессов экзоэлектронной эмиссии,
электромагнитного и акустического
излучения [11, 12].
,
напряженно-деформационное состояние
контакта, сопротивление касательным
усилиям,
амплитудно-фазо-частотные характеристики
процессов экзоэлектронной эмиссии,
электромагнитного и акустического
излучения [11, 12].
Составить математическую модель для подсистемы механической части не представляется возможным ввиду нелинейных функциональных зависимостей параметров, описывающих ее движение. Поэтому принимаем метод анализа размерностей (с ограничениями) с учетом необходимых соотношений, определяющих динамическое подобие механической системы в целом.
В отличие от метода подобия метод анализа размерностей с ограничениями [8] позволяет сложные неоднородные системы превращать в сложные однородные и получать единственное значение масштабных коэффициентов перехода от модели к натуре для каждого из параметров.
Модели должны включать динамические, тепловые, химические и нелинейные свойства материалов и учитывать влияние неровностей поверхности. Состояние реальной поверхности натурального образца и его модели является в этом смысле определяющим, так как именно на совершенствование качественных показателей поверхностей сцепления для улучшения их сцепных характеристик направлены методы нанесения покрытий и модификации.
Для того чтобы процессы сцепления для натурного образца и его модели на уровне взаимодействия микронеровностей были адекватны необходимо для модели создать условия адекватные натурным, которые определяются принципами динамической совместимости и формируются как при моделировании механических систем привода, так и моделировании механической части пары сцепления.
Входное воздействие, обусловленное неровностями поверхностей, характеризуется амплитудой, длительностями периода разгона и частотой возбуждения при установившемся движении. Хотя основные уравнения движения нелинейны, нелинейности влияют в основном на начальной стадии переходных процессов и не принадлежат к числу важных факторов, влияющих на максимальные уровни динамических сил. Поэтому можно вычисления динамических сил проводить при одном уровне амплитуды возбуждения. Эти значения амплитуды можно считать умеренным, учитывая высокую жесткость контактных пар колеса и рельса.
Механическая система тягового привода обладает свойством избирательности, то есть проявляют свои динамические свойства на частотах собственных колебаний. Поэтому взаимовлияние параметров механической системы на сцепные характеристики пары «колесо – рельс» проявляются в том, что она по отношению к процессам сцепления является фильтром, избирающим дискретное множество частот, как правило, соответствующих или близких собственным частотам и основным формам колебаний механической системы.
Анализ значений максимальных динамических сил свидетельствует о их возрастании по мере того, как частота возбуждения при установившемся движении приближается к собственной частоте колебаний в нормальном направлении, а после перехода через эти силы уменьшаются. Когда частота возбуждения остается в течение некоторого времени в окрестности резонансной частоты колебаний в нормальном направлении (при подходе к резонансу либо при переходе через него), вполне возможна потеря контакта колеса и рельса. Большая динамическая нормальная нагрузка означает появление и больших динамических сил сцепления. Когда частота возбуждения при установившемся движении остается гораздо ниже, чем резонансные частоты колебаний в тангенциальном и нормальном направлениях, динамические эффекты пренебрежимо малы, за исключением обусловленных начальным сцеплением.
Большие динамические силы возбуждаются в течение малого промежутка времени, если частота возбуждения при установившемся проскальзывании приближается к резонансной частоте колебаний в тангенциальном или нормальном направлениях или превышает ее. Резонансные частоты колебаний в нормальном и тангенциальном направлении, как правило, довольно велики (порядка нескольких сотен или даже тысяч Гц). Поэтому шероховатости поверхности колеса и рельса даже весьма небольшой амплитуды в результате резонанса в нормальном направлении могут усиливаться до такой степени, что вызывают интенсивные колебания в нормальном направлении, осцилляцию сил и в некоторых случаях приводят к потере сцепления. Таким образом, динамические контактные силы, возбуждаемые под влиянием неровностей поверхностей сцепления при их относительном проскальзывании могут быть довольно велики при определенных диапазонах значений параметров системы и входных воздействий.
Согласно классических представлений о дискретности фрикционного контакта [13, 14] поверхности трения контактируют в отдельных пятнах (диаметром от 0,1 до 20 ÷ 30 мкм) и суммарное тангенциальное сопротивление является суммой тангенциальных сопротивлений единичных фрикционных связей, а суммарная диссипативная энергия равна сумме диссипативных энергий образования и разрушения единичных фрикционных связей при сцеплении. Важнейшей характеристикой, которая определяет состояние дискретности контакта, является величина сближения. Кроме того, как отмечено в [15], величина сближения определяет характер сцепления и величину износа поверхностей, поскольку с глубиной внедрения связаны характер их взаимодействия, ФПК и размер пятен контакта, а в расчетных формулах для расчета сближения между поверхностями молекулярная составляющая коэффициента трения уменьшается, а деформационная увеличивается и это изменяет величины составляющих коэффициента трения. На основании этого можно сказать, что при одинаковых условиях на контакте для модели и реальной поверхности «колесо - рельс» равным сближениям соответствуют равные коэффициенты сцепления.
Процесс формирования равновесной шероховатости на поверхностях колеса и рельса происходит в условиях динамического взаимодействия с механическими системами путевой машины и ВСП, в которые входит и является связующим элементом пара сцепления «колесо – рельс». Согласно принципу Гамильтона [16], взаимодействие компонентов системы должно стремиться происходить с минимальными потерями энергии. Минимальные потери энергии могут реализовываться лишь на установившемся режиме взаимодействия в условиях устойчивого резонанса частот собственных и вынужденных колебаний, то есть процесс фрикционного контактирования при установившейся равновесной шероховатости происходит или стремится происходить при резонансе между частотой вынужденных колебаний напряжений на поверхности контакта и частотой колебаний напряжений, соответствующих одной из собственных частот колебаний механической системы. Последнее подтверждается результатами проведенных исследований [17], когда изменение приведенной жесткости механической системы (или приведенного момента инерции) однозначно приводит к реализации переходного процесса сцепления, по окончании которого на контакте колеса и рельса устанавливается новая равновесная шероховатость. Данное положение хорошо согласуется с открытым И.В. Крагельским процессом воспроизведения шероховатости поверхности при установившемся режиме трения.
Соответственно,
если моделировать контакт колеса и
рельса на уровне микронеровностей путем
принудительного изменения шероховатости
в соответствии с масштабом линейных
размеров
![]() ,
как это принято в работе [8], при постоянстве
параметров контактного давления и
скорости проскальзывания для модели и
реальной пары сцепления, то изменится
и величина сближения. Подобная практика
моделирования с учетом принятых условий,
то есть
,
как это принято в работе [8], при постоянстве
параметров контактного давления и
скорости проскальзывания для модели и
реальной пары сцепления, то изменится
и величина сближения. Подобная практика
моделирования с учетом принятых условий,
то есть![]() ,
создаст на поверхности неустановившийся
режим сцепления (процесс приработки),
который после завершения и выхода на
установившийся режим приведет к
реализации равновесной шероховатости
на поверхностях моделей колеса и рельса.
,
создаст на поверхности неустановившийся
режим сцепления (процесс приработки),
который после завершения и выхода на
установившийся режим приведет к
реализации равновесной шероховатости
на поверхностях моделей колеса и рельса.
Скорость
проскальзывания определяет число
взаимодействующих микронеровностей в
единицу времени - частота вынужденных
колебаний должна быть пропорциональна
скорости проскальзывания. Действительно,
если считать, что на пути проскальзывания
Lплощадь касания
воспроизводитсяmраз,
то при диаметреdпятна
касания![]() .
Если разделить обе части этого равенства
на времяt, то имеем
.
Если разделить обе части этого равенства
на времяt, то имеем![]() или, при
или, при![]() ,
а
,
а![]() ,
окончательно получим
,
окончательно получим![]() .
.
Величина коэффициента сцепления зависит от скорости проскальзывания, так как при этом изменяются условия взаимодействия и разрушения поверхностей. Скорость проскальзывания имеет определяющее влияние на величину температурных характеристик (поверхностная температура, температурный градиент, объемная температура, температура вспышки) и это подтверждает выводы исследований Чудакова Е.А. о том, что градиент температуры не зависит от давления и вполне определяется скоростью скольжения.
В работе Е.И. Адировича и Д.И. Блохинцева [18] для модели поверхности, имеющей одинаковые периодически расположенные выступы, установлено, что сила трения, обусловленная рассеиванием энергии за счет упругих волн, возникающих при взаимодействии выступов трущихся поверхностей, обратно пропорциональна относительной скорости. Следовательно, изменение скорости проскальзывания в контакте «колесо – рельс» и, как следствие, частоты вынужденных колебаний приведет к изменению сложившегося равновесного состояния. Переход системы в новое устойчивое состояние будет связан с изменением топографии поверхностей сцепления до установления равновесной шероховатости на другом резонансном уровне. Равновесная шероховатость поверхности сцепления определяется частотой вынужденных колебаний и соответствует минимально возможному в данных условиях коэффициенту сцепления.
Как
показано в работах И.В. Крагельского,
Н.Б. Демкина [15, 19], Э.В. Рыжова [20], при
одинаковых условиях на контакте для
модели и реальной поверхности, равным
сближениям соответствуют равные
коэффициенты трения и равные удельные
линейные износы
![]() .
Согласно модели И.Г. Горячевой и М.Н.
Добычина, процесс изменения геометрических
параметров идет до тех пор, пока на
пятнах фактического контакта не
выравнивается контактное давление
[21]. Для сохранения равенства контактных
давлений на контакте нормальная нагрузка
должна иметь масштабный коэффициент
перехода от натуры к модели, равный
масштабному коэффициенту площади
контакта, то есть
.
Согласно модели И.Г. Горячевой и М.Н.
Добычина, процесс изменения геометрических
параметров идет до тех пор, пока на
пятнах фактического контакта не
выравнивается контактное давление
[21]. Для сохранения равенства контактных
давлений на контакте нормальная нагрузка
должна иметь масштабный коэффициент
перехода от натуры к модели, равный
масштабному коэффициенту площади
контакта, то есть![]() .
При одинаковых сближениях и фактических
площадях контакта, изменяющихся
пропорционально нагрузке, равным
фактическим контактным давлениям будут
соответствовать равные средние нормальные
напряжения на контакте для реальных
поверхностей и для модели. Это позволяет
охарактеризовать контактное давление
на поверхности сцепления как критерий,
равенство которого для реальной
поверхности и ее модели является
определяющим, то есть
.
При одинаковых сближениях и фактических
площадях контакта, изменяющихся
пропорционально нагрузке, равным
фактическим контактным давлениям будут
соответствовать равные средние нормальные
напряжения на контакте для реальных
поверхностей и для модели. Это позволяет
охарактеризовать контактное давление
на поверхности сцепления как критерий,
равенство которого для реальной
поверхности и ее модели является
определяющим, то есть![]() .
.
Эксперименты показали, что существуют вполне определенные физические условия, которые определяют толщину пленки загрязнителей на тяговой поверхности колеса и рельса в виде невыдавливаемого слоя и оценивается количеством загрязнений на единицу поверхности зоны контакта при эксплуатационных давлениях и реализуемой величине проскальзывания.
Толщину и структуру окисной пленки металлов колеса и рельса также моделировать невозможно, так как они определяются энергией сублимации поверхностного слоя и будут одинаковы, если для модели сохранены материал реальной пары сцепления и окружающая среда, что также является непременным условием моделирования.
Проведенный анализ условий моделирования для различных режимов сцепления показал, что непосредственно контакт колеса и рельса на уровне взаимодействия шероховатостей моделирования не требует и является самоорганизующимся процессом. Необходимые условия для его реализации определены тем, что материалы поверхностей сцепления, параметры шероховатости, скорость проскальзывания, контактное давление, толщина пленки загрязнителей для реальных поверхностей сцепления и их модели равны и задача исследователя – при моделировании механических частей путевой машины и ВСП обеспечить данные условия адекватности.
Решение противоречий при составлении физической модели
системы «путевая машина – ВСП»
В основе адекватности разрабатываемой физической модели лежат принципы решения контактных задач поверхностей сцепления, рассмотрение вопросов разрыва фрикционных связей, влияния краевых эффектов на процессы сцепления и т.д. В этом случае имеет значение не только величина фактической площади контакта (ФПК), но и точная модель пятна контакта колеса и рельса. Однако для этого требуется решение ряда противоречий.
Особенностью
работы системы "путевая машина - ВСП"
является то, что она относится к системам
совершающих колебания в поле сил
тяготения и, соответственно, возникают
противоречия связанные с моделированием
сил тяжести
![]() ,
так как в реальных условиях
,
так как в реальных условиях![]() .
В этом случае
.
В этом случае![]() ,
а так
,
а так![]() и
при
и
при![]() (использование для натурного образца
и его модели одинаковых материалов)
(использование для натурного образца
и его модели одинаковых материалов)![]() .
.
Подобное
решение приводит к ряду других
противоречий. Непременным условием
реализации равных сил сцепления в
контакте «колесо – рельс» натурного
образца и его модели является равенство
контактных давлений, т.е.
![]() .
Для этого необходимо обеспечить
.
Для этого необходимо обеспечить![]() ,
так как из
,
так как из![]() имеем индикатор подобия
имеем индикатор подобия![]() ,
или в константах подобия
,
или в константах подобия![]() .
С учетом того, что
.
С учетом того, что![]() имеем
имеем![]() ,
что входит в противоречие с полученным
ранее
,
что входит в противоречие с полученным
ранее![]() .
.
Рассмотрим соотношения, определяющие константу подобия жесткости.
Например, для схемы нагружения рельса в стыке, представленной на рисунке 4.5.

Рис.4.5 Нагружение рельса в стыке
![]() ( 4.29)
( 4.29)
где y- значение наибольшего прогиба; Р - сосредоточенная сила; Е - модуль упругости;
![]() -
осевой момент инерции по перечного
сечения относительно осиX.
-
осевой момент инерции по перечного
сечения относительно осиX.
Тогда, представляя
выражение (4.29) как индикатор подобия
для модели и натуры, имеем
![]() ,
или в константах подобия
,
или в константах подобия![]() (5.30).
(5.30).
Так
как
![]() ,
то из выражения (5.30) следует, что
,
то из выражения (5.30) следует, что![]() .
Необходимо отметить, что данное условие
является безусловным, так как жесткость
зависит только от линейных размеров
поперечного сечения рельса натуры и
модели.
.
Необходимо отметить, что данное условие
является безусловным, так как жесткость
зависит только от линейных размеров
поперечного сечения рельса натуры и
модели.
Во-
вторых, из ранее принятого условия
динамического подобия имеем
![]() ,
а так как
,
а так как![]() ,
то
,
то![]() ,
то по ранее принятому индикатору подобия
,
то по ранее принятому индикатору подобия![]() имеем
имеем![]() .
.
Таким
образом, принимая масштаб моделирования
линейных размеров
![]() ,
тем самым определяем константу подобия
массы равной
,
тем самым определяем константу подобия
массы равной![]() .
В выполнении первого условия динамического
подобия возникает противоречие, так
как
.
В выполнении первого условия динамического
подобия возникает противоречие, так
как![]() ,
а
,
а![]() .
Решение данного противоречия в работе
[5] предлагается решить путем изменения
константы подобия масс, то есть приведение
ее в соответствие с
.
Решение данного противоречия в работе
[5] предлагается решить путем изменения
константы подобия масс, то есть приведение
ее в соответствие с![]() .
Для этого вводится понятие добавочной
массы, расположение которой не изменяет
линейные размеры тела, то есть с сохранения
.
Для этого вводится понятие добавочной
массы, расположение которой не изменяет
линейные размеры тела, то есть с сохранения![]() .
Устранение противоречия путем введения
в систему добавочной массы
.
Устранение противоречия путем введения
в систему добавочной массы![]() заключается в размещении ее в точке
приложения возмущающей силы. Если точек
приложения возмущающих сил несколько,
добавочная масса пропорционально
распределяется по данным точкам.
заключается в размещении ее в точке
приложения возмущающей силы. Если точек
приложения возмущающих сил несколько,
добавочная масса пропорционально
распределяется по данным точкам.
Величина
добавочной массы определяется как
разница между массой, вычисленной в
соответствии с
![]() и
и![]() ,
по формуле
,
по формуле
 . ( 5.31)
. ( 5.31)
Принимая
метод добавочной массы следует учитывать,
что этот метод ограничивает возможные
масштабы линейных размеров модели. Как
указывает автор, модельная оптимизация
с применением линейного масштаба
![]() более 2,5 для моделей путевых машин
вызывает трудности с воспроизведением
ее на стенде.
более 2,5 для моделей путевых машин
вызывает трудности с воспроизведением
ее на стенде.
Анализируя
каждое из возможных значений
![]() можно констатировать, что выбор
можно констатировать, что выбор![]() ,
а также
,
а также![]() являются следствием выдвигаемых
исследователем условий, а именно:
являются следствием выдвигаемых
исследователем условий, а именно:
условие динамического подобия механической системы путевой машины, когда требуется обеспечить динамическую совместимость процессов протекающих в механической системе и на поверхности сцепления в контакте «колесо – рельс»;
условий, когда кроме динамического подобия необходима модель контакта колеса с рельсом с упором на решение контактных задач, рассмотрения вопросов разрыва фрикционных связей, моделирование процессов вертикального и бокового износа.
Рассмотрим возможные варианты решения противоречий связанных с реализацией физического моделирования тяговых характеристик путевых машин при их модельной оптимизации.
Во-
первых, моделирование имеет смысл, если
на поверхностях натурного образца
колеса и рельса и его модели реализуются
адекватные условия сцепления. Непременным
условием этого является равенство
контактных давлений, т.е.
![]() и равенство скоростей проскальзывания
для натурного образца и его модели, т.е.
и равенство скоростей проскальзывания
для натурного образца и его модели, т.е.![]() .
Для последнего условия получаем
.
Для последнего условия получаем![]() ,
то есть при
,
то есть при![]() имеем константу подобия изменения
линейных размеров
имеем константу подобия изменения
линейных размеров![]() .
Это означает, что изменение линейных
размеров
.
Это означает, что изменение линейных
размеров![]() в натурных и модельных условиях должны
быть одинаковы.
в натурных и модельных условиях должны
быть одинаковы.
Из
ранее полученного условия для константы
нагрузки на рельс от колесной пары можно
записать
![]() .
Откуда при условии
.
Откуда при условии![]() имеем
имеем![]() ,
а с учетом ранее принятого условия
динамического подобия можно записать,
что
,
а с учетом ранее принятого условия
динамического подобия можно записать,
что![]() .
.
Рассмотрим
нагрузку как результат деформации связи
жесткостью С на величину деформации
![]() ,
то есть в соответствии с законом Гука
,
то есть в соответствии с законом Гука![]() или в виде индикатора подобия
или в виде индикатора подобия![]() .
Или в константах подобия
.
Или в константах подобия![]() .
Откуда при ранее полученном
.
Откуда при ранее полученном![]() имеем
имеем![]() .
.
Можно сделать вывод, что константа подобия нагрузки на рельс от колесной пары равна квадрату константы подобия линейных размеров при всех вариантах его определения: как произведения давления на площадь контакта, как произведения массы на ускорение свободного падения и как произведения жесткости связи на деформацию.
Рассмотрим
влияние суммы динамических сил инерции
движения шероховатости поверхности
сцепления
![]() (
(![]() -
масса единичной шероховатости,
-
масса единичной шероховатости,![]() -
ускорение) на величину контактного
давления в динамике
-
ускорение) на величину контактного
давления в динамике![]() ,
которое определятся как сумма ее
элементарных давлений в точках ФПК.
Тогда
,
которое определятся как сумма ее
элементарных давлений в точках ФПК.
Тогда![]() ,
а с учетом
,
а с учетом![]() ,
при
,
при![]() имеем
имеем![]() ,
поэтому принимаем величину вертикальных
перемещение активных микрообъемов
натурного образца
,
поэтому принимаем величину вертикальных
перемещение активных микрообъемов
натурного образца![]() и его модели
и его модели![]() равной амплитуде вертикальных перемещений
шероховатостей в процессе сцепления,
т.е.
равной амплитуде вертикальных перемещений
шероховатостей в процессе сцепления,
т.е.![]() .
Выражение для
.
Выражение для![]() представим
в константах подобия
представим
в константах подобия![]() и тогда выражение
и тогда выражение![]() примет вид
примет вид![]() ,
то есть условие равенства контактных
давлений для натурного образца и его
модели в результате моделирования не
нарушается.
,
то есть условие равенства контактных
давлений для натурного образца и его
модели в результате моделирования не
нарушается.
Основой
данного представления является принятие
в качестве основополагающего
![]() ,
то есть деформации связей, деформации
микро- и макрошероховатостей в модельных
и натурных условиях равны между собой.
Данное положение можно сформулировать
в виде правила: «При комплексном
физическом моделировании дискретная
поверхность контакта шероховатостей
контактирующих поверхностей не
моделируется».
,
то есть деформации связей, деформации
микро- и макрошероховатостей в модельных
и натурных условиях равны между собой.
Данное положение можно сформулировать
в виде правила: «При комплексном
физическом моделировании дискретная
поверхность контакта шероховатостей
контактирующих поверхностей не
моделируется».