

24.1.70.Антиблокировочные системы (абс).
Регуляторы тормозных сил неспособны реагировать на изменение величины коэффициента сцепления колеса с дорогой. Величина данного коэффициента, равная отношению максимально возможной продольной касательной реакции колеса Rх к его вертикальной
р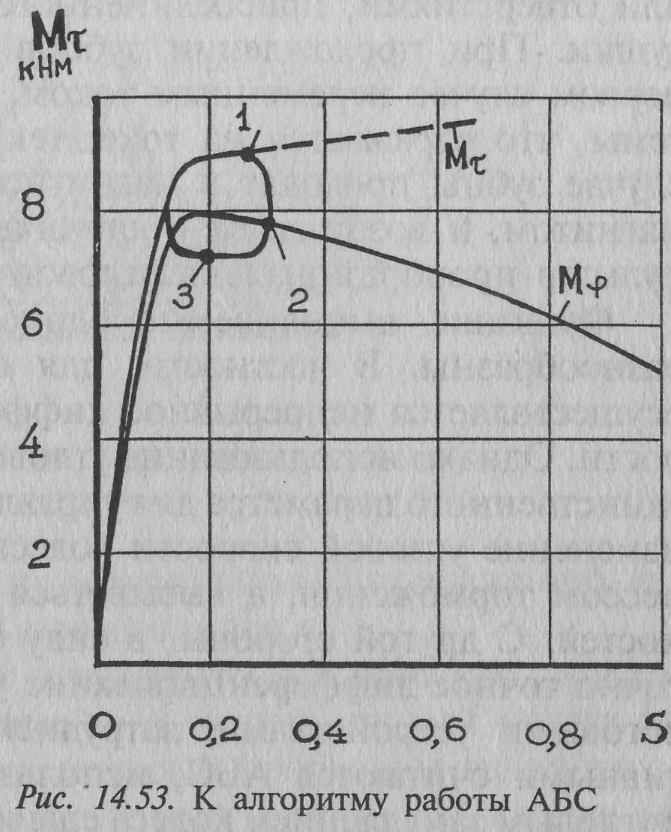
 еакцииRу
(ץ
=
(Rx)/(Rz)),
в случае торможения весьма нестабильна.
Кроме очевидной зависимости коэффициента
сцепления от качества и состояния
дорожного покрытия, его величина при
постоянных свойствах покрытия зависит
еще и от величины скольжения в контакте
колеса с дорогой, а также от скорости
движения оси колеса. Передача колесом
тяговой или тормозной силы сопровождается
некоторым скольжением элементов шины,
находящихся в контакте с дорогой. Чем
больше передаваемая сила, тем больше
это скольжение. Величину скольжения
в контакте оценивают обычно относительным
скольжением S,
равным
отношению скорости скольжения к линейной
скорости движения колеса. Зависимость
коэффициента сцепления от относительного
скольжения при постоянной угловой
скорости колеса принято называть «ץ
—S
диаграммой». На рис.
14.52 приведена
типичная «<ץ
—S
диаграмма». Ее вид подтверждает
наличие зависимости коэффициента
сцепления от качества дорожного
покрытия, его состояния, линейной
скорости оси колеса (скорости автомобиля)
и величины скольжения. Очевидно, что
для получения наибольших замедлений
автомобиля необходимо в процессе
торможения поддерживать величину
относительного скольжения колеса в
диапазоне, располагающемся около
экстремума диаграммы. Для этого в
конструкции тормозного привода
должны быть применены дополнительные
устройства. В частности, необходимо
устройство, регулирующее тормозной
момент путем регулирования давления
рабочего тела в зависимости от режима
работы колеса. Такие
устройства называются модуляторами.
Модулятором необходимо управлять,
давая команды на увеличение или уменьшение
давления рабочего тела. Чтобы выработать
данные команды, надо собрать и обработать
информацию о параметрах движения
автомобиля и вращения его колес. Эти
задачи решает блок управления. Сбор
указанной информации осуществляют
датчики. При постоянном значении
вертикальной реакции колеса Rz
величина
коэффициента сцепления однозначно
определяет величину максимальной
продольной касательной реакции колеса
Rx.
Зная
величину продольной касательной реакции
колеса и его радиус, можно вычислить
величину крутящего момента, который
обеспечит максимально возможный
тормозной эффект, и построить зависимость
Mץ
=f(S),
которая
будет аналогична «ץ
— S
диаграмме».
На рис.
14.53 приведена
такая зависимость для одного из вариантов
условий движения. На этом же графике
приведена характеристика тормозного
момента Мt,
реально
подводимого со стороны тормозного
механизма. Допустим, что к колесу
подводится излишне большой тормозной
момент, превышающий сцепные возможности
колеса. С его ростом будет возрастать
и скольжение колеса в контакте с дорогой.
Пока рост скольжения сопровождается
возрастанием сцепных возможностей
колеса (левая часть графика M
ץ
до
точки его перегиба), движение колеса с
уменьшающейся скоростью вращения будет
устойчивым. Как только скольжение
превысит определенную для заданных
условий величину (характеризуемую
на графике величиной S=0,2),
доля тормозного момента, идущая на
создание касательных сил, начнет
уменьшаться, а доля, затрачиваемая
на угловое замедление колеса, соответственно
возрастать. Это приведет к быстрому
росту замедления колеса (процесс его
вращения становится неустойчивым,
поскольку замедление будет возрастать
при неизменном или даже слегка
уменьшающемся тормозном моменте).
Если автомобиль не снабжен антиблокировочной
системой, то колесо может быть доведено
до состояния блокировки (юза). При наличии
антиблокировочной системы блок управления
постоянно сравнивает текущее значение
замедления колеса с заранее заданной
ему величиной и при их равенстве в момент
времени выдает модулятору сигнал на
растормаживание колеса. После некоторой
задержки, обусловленной инерционностью
систем, давление рабочего тела начнет
снижаться, что приведет сначала к
снижению темпа увеличения углового
замедления колеса, а затем и к его
снижению. На рис.
14.53 это
соответствует участку 1-2. После того
как величина замедления колеса сравняется
с заданной величиной нижнего предела
замедления, блок управления выдает
команду на прекращение дальнейшего
снижения давления рабочего тела.
Вследствие снижения давления рабочего
тела колесо начнет разгоняться (это
соответствует точке 3), после чего
последует команда на увеличение
давления рабочего тела и все начнется
сначала. Цикл
работы антиблокировочной системы может
содержать две или три фазы.
Разница заключается в наличии или
отсутствии фазы выдержки постоянного
давления рабочего тела. При той же
эффективности расход рабочего тела у
трехфазовых АБС существенно меньше.
Это
обстоятельство объясняет меньшую
распространенность двухфазовых
антиблокировочных систем,
несмотря на большую простоту их
блоков управления и модуляторов.
Современные АБС имеют датчики,
установленные в колесах и непрерывно
измеряющие их угловые скорости.
Применяются датчики
разных типов, но наибольшее распространение
получили индуктивные и индукционные.
Датчики состоят из диска с зубцами или
отверстиями, присоединенного к колесу,
и индукционной катушки. При прохождении
зубцов мимо катушки, питающейся в первом
случае переменным током, изменяется
индуктивность системы, что отражается
на токе, текущем через катушку. Во втором
случае зубцы проходят в магнитном поле,
созданном постоянным магнитом, и
возбуждают в катушке ЭДС. Частота
получаемых импульсов пропорциональна
угловой скорости колеса. Функции,
выполняемые блоком управления АБС,
сложны и разнообразны.
В частности, для определения замедления
колеса осуществляется непрерывное
дифференцирование его угловой скорости.
Однако использование углового замедления
колеса в качестве единственного параметра
для управления АБС не оптимально. Резкое
изменение угловой скорости колеса,
может быть не связано с процессом
торможения, а вызываться воздействием
дорожных неровностей. С другой
стороны, в силу определенной специфики
достаточно точное дифференцирование
угловой скорости, особенно аналоговыми
устройствами, затруднено. Поэтому
наиболее перспективными считаются
АБС,
использующие для управления, наряду
с угловым замедлением колеса еще и
линейную скорость автомобиля,
хотя простые и достаточно дешевые
датчики, измеряющие скорость автомобиля
независимо от угловой скорости его
колес, еще не разработаны. Помимо
отмеченных параметров,
для оптимального регулирования
процесса торможения блок управления
должен учитывать еще и такие факторы,
как трение в исполнительных механизмах
тормозов и реальную, зависящую от
температуры, тангенциальную упругость
шины, а также тангенциальную упругость
направляющего устройства подвески
(упругую деформацию подвески в направлении
действия реактивного тормозного момента,
что в первую очередь относится к рессоре,
воспринимающей реактивный момент за
счет S-образного
изгиба). Таким образом, блок управления
является весьма сложным узлом. Лучшие
блоки управления по сложности приближаются
к цифровой ЭВМ и способны обеспечить
весьма малые размеры отмеченной на
рис. 14.53 петля 1—2—3,
что позволяет не только сохранять
устойчивость автомобиля при торможении
на скользкой дороге, но и уменьшать в
этих условиях тормозной путь. Обязательность
наличия трех структурных элементов:
датчика, управляющего блока и
модулятора не исключает разнообразия
схем АБС. В простейшей из представленных
(рис.
14.56 а) схем
применен один датчик, измеряющий
среднее замедление колес заднего моста
(замедление корпуса дифференциала),
и один модулятор. Такое решение
обеспечивает низкую стоимость ПБУ и в
значительной степени повышает
устойчивость автомобиля при торможении
за счет уменьшения вероятности срыва
задних колес в занос. Однако оно не
позволяет в достаточной степени учесть
различие коэффициентов сцепления
правого и левого колес с дорогой и
не препятствует блокировке передних
колес автомобиля. Схема, представленная
на рис.
14.56 б, содержит
два датчика, но один управляющий блок
и один модулятор. Такая система может
работать либо в низкопороговом режиме,
когда управление торможением осуществляется
исходя из параметров качения колеса,
находящегося в худших условиях сцепления,
либо в высокопороговом режиме, когда
работу системы определяет колесо,
имеющее лучший коэффициент сцепления.
В первом случае будет наблюдаться
недотормаживание колес, а во втором -
блокировка «слабого» колеса. При большом
различии коэффициентов сцепления во
втором случае появится большое различие
продольных касательных реакций между
правым и левым бортами автомобиля.
Преимущества
и недостатки схемы,
показанной на рис.
14.56 в, по
сравнению со схемой, изображенной на
рис.
14.56 6, очевидны.
Наиболее сложна и дорога АБС, построенная
по схеме, приведенной на рис.
14.56 г, но
она обладает и наилучшими качествами.
Однако и в этом случае при сильно
отличающихся коэффициентах сцепления
под правыми и левыми колесами возможен
занос автомобиля. Для устранения этого
необходимо согласовать работу всех
блоков управления.
еакцииRу
(ץ
=
(Rx)/(Rz)),
в случае торможения весьма нестабильна.
Кроме очевидной зависимости коэффициента
сцепления от качества и состояния
дорожного покрытия, его величина при
постоянных свойствах покрытия зависит
еще и от величины скольжения в контакте
колеса с дорогой, а также от скорости
движения оси колеса. Передача колесом
тяговой или тормозной силы сопровождается
некоторым скольжением элементов шины,
находящихся в контакте с дорогой. Чем
больше передаваемая сила, тем больше
это скольжение. Величину скольжения
в контакте оценивают обычно относительным
скольжением S,
равным
отношению скорости скольжения к линейной
скорости движения колеса. Зависимость
коэффициента сцепления от относительного
скольжения при постоянной угловой
скорости колеса принято называть «ץ
—S
диаграммой». На рис.
14.52 приведена
типичная «<ץ
—S
диаграмма». Ее вид подтверждает
наличие зависимости коэффициента
сцепления от качества дорожного
покрытия, его состояния, линейной
скорости оси колеса (скорости автомобиля)
и величины скольжения. Очевидно, что
для получения наибольших замедлений
автомобиля необходимо в процессе
торможения поддерживать величину
относительного скольжения колеса в
диапазоне, располагающемся около
экстремума диаграммы. Для этого в
конструкции тормозного привода
должны быть применены дополнительные
устройства. В частности, необходимо
устройство, регулирующее тормозной
момент путем регулирования давления
рабочего тела в зависимости от режима
работы колеса. Такие
устройства называются модуляторами.
Модулятором необходимо управлять,
давая команды на увеличение или уменьшение
давления рабочего тела. Чтобы выработать
данные команды, надо собрать и обработать
информацию о параметрах движения
автомобиля и вращения его колес. Эти
задачи решает блок управления. Сбор
указанной информации осуществляют
датчики. При постоянном значении
вертикальной реакции колеса Rz
величина
коэффициента сцепления однозначно
определяет величину максимальной
продольной касательной реакции колеса
Rx.
Зная
величину продольной касательной реакции
колеса и его радиус, можно вычислить
величину крутящего момента, который
обеспечит максимально возможный
тормозной эффект, и построить зависимость
Mץ
=f(S),
которая
будет аналогична «ץ
— S
диаграмме».
На рис.
14.53 приведена
такая зависимость для одного из вариантов
условий движения. На этом же графике
приведена характеристика тормозного
момента Мt,
реально
подводимого со стороны тормозного
механизма. Допустим, что к колесу
подводится излишне большой тормозной
момент, превышающий сцепные возможности
колеса. С его ростом будет возрастать
и скольжение колеса в контакте с дорогой.
Пока рост скольжения сопровождается
возрастанием сцепных возможностей
колеса (левая часть графика M
ץ
до
точки его перегиба), движение колеса с
уменьшающейся скоростью вращения будет
устойчивым. Как только скольжение
превысит определенную для заданных
условий величину (характеризуемую
на графике величиной S=0,2),
доля тормозного момента, идущая на
создание касательных сил, начнет
уменьшаться, а доля, затрачиваемая
на угловое замедление колеса, соответственно
возрастать. Это приведет к быстрому
росту замедления колеса (процесс его
вращения становится неустойчивым,
поскольку замедление будет возрастать
при неизменном или даже слегка
уменьшающемся тормозном моменте).
Если автомобиль не снабжен антиблокировочной
системой, то колесо может быть доведено
до состояния блокировки (юза). При наличии
антиблокировочной системы блок управления
постоянно сравнивает текущее значение
замедления колеса с заранее заданной
ему величиной и при их равенстве в момент
времени выдает модулятору сигнал на
растормаживание колеса. После некоторой
задержки, обусловленной инерционностью
систем, давление рабочего тела начнет
снижаться, что приведет сначала к
снижению темпа увеличения углового
замедления колеса, а затем и к его
снижению. На рис.
14.53 это
соответствует участку 1-2. После того
как величина замедления колеса сравняется
с заданной величиной нижнего предела
замедления, блок управления выдает
команду на прекращение дальнейшего
снижения давления рабочего тела.
Вследствие снижения давления рабочего
тела колесо начнет разгоняться (это
соответствует точке 3), после чего
последует команда на увеличение
давления рабочего тела и все начнется
сначала. Цикл
работы антиблокировочной системы может
содержать две или три фазы.
Разница заключается в наличии или
отсутствии фазы выдержки постоянного
давления рабочего тела. При той же
эффективности расход рабочего тела у
трехфазовых АБС существенно меньше.
Это
обстоятельство объясняет меньшую
распространенность двухфазовых
антиблокировочных систем,
несмотря на большую простоту их
блоков управления и модуляторов.
Современные АБС имеют датчики,
установленные в колесах и непрерывно
измеряющие их угловые скорости.
Применяются датчики
разных типов, но наибольшее распространение
получили индуктивные и индукционные.
Датчики состоят из диска с зубцами или
отверстиями, присоединенного к колесу,
и индукционной катушки. При прохождении
зубцов мимо катушки, питающейся в первом
случае переменным током, изменяется
индуктивность системы, что отражается
на токе, текущем через катушку. Во втором
случае зубцы проходят в магнитном поле,
созданном постоянным магнитом, и
возбуждают в катушке ЭДС. Частота
получаемых импульсов пропорциональна
угловой скорости колеса. Функции,
выполняемые блоком управления АБС,
сложны и разнообразны.
В частности, для определения замедления
колеса осуществляется непрерывное
дифференцирование его угловой скорости.
Однако использование углового замедления
колеса в качестве единственного параметра
для управления АБС не оптимально. Резкое
изменение угловой скорости колеса,
может быть не связано с процессом
торможения, а вызываться воздействием
дорожных неровностей. С другой
стороны, в силу определенной специфики
достаточно точное дифференцирование
угловой скорости, особенно аналоговыми
устройствами, затруднено. Поэтому
наиболее перспективными считаются
АБС,
использующие для управления, наряду
с угловым замедлением колеса еще и
линейную скорость автомобиля,
хотя простые и достаточно дешевые
датчики, измеряющие скорость автомобиля
независимо от угловой скорости его
колес, еще не разработаны. Помимо
отмеченных параметров,
для оптимального регулирования
процесса торможения блок управления
должен учитывать еще и такие факторы,
как трение в исполнительных механизмах
тормозов и реальную, зависящую от
температуры, тангенциальную упругость
шины, а также тангенциальную упругость
направляющего устройства подвески
(упругую деформацию подвески в направлении
действия реактивного тормозного момента,
что в первую очередь относится к рессоре,
воспринимающей реактивный момент за
счет S-образного
изгиба). Таким образом, блок управления
является весьма сложным узлом. Лучшие
блоки управления по сложности приближаются
к цифровой ЭВМ и способны обеспечить
весьма малые размеры отмеченной на
рис. 14.53 петля 1—2—3,
что позволяет не только сохранять
устойчивость автомобиля при торможении
на скользкой дороге, но и уменьшать в
этих условиях тормозной путь. Обязательность
наличия трех структурных элементов:
датчика, управляющего блока и
модулятора не исключает разнообразия
схем АБС. В простейшей из представленных
(рис.
14.56 а) схем
применен один датчик, измеряющий
среднее замедление колес заднего моста
(замедление корпуса дифференциала),
и один модулятор. Такое решение
обеспечивает низкую стоимость ПБУ и в
значительной степени повышает
устойчивость автомобиля при торможении
за счет уменьшения вероятности срыва
задних колес в занос. Однако оно не
позволяет в достаточной степени учесть
различие коэффициентов сцепления
правого и левого колес с дорогой и
не препятствует блокировке передних
колес автомобиля. Схема, представленная
на рис.
14.56 б, содержит
два датчика, но один управляющий блок
и один модулятор. Такая система может
работать либо в низкопороговом режиме,
когда управление торможением осуществляется
исходя из параметров качения колеса,
находящегося в худших условиях сцепления,
либо в высокопороговом режиме, когда
работу системы определяет колесо,
имеющее лучший коэффициент сцепления.
В первом случае будет наблюдаться
недотормаживание колес, а во втором -
блокировка «слабого» колеса. При большом
различии коэффициентов сцепления во
втором случае появится большое различие
продольных касательных реакций между
правым и левым бортами автомобиля.
Преимущества
и недостатки схемы,
показанной на рис.
14.56 в, по
сравнению со схемой, изображенной на
рис.
14.56 6, очевидны.
Наиболее сложна и дорога АБС, построенная
по схеме, приведенной на рис.
14.56 г, но
она обладает и наилучшими качествами.
Однако и в этом случае при сильно
отличающихся коэффициентах сцепления
под правыми и левыми колесами возможен
занос автомобиля. Для устранения этого
необходимо согласовать работу всех
блоков управления.