

4.4. Моделирование двухконтурной спр.
Представим модель двухконтурной СПР, построенную в программе Matlab:

Объект управления имеет вид:

---------------------------------------------------
ИССЛЕДОВАНИЕ ЭЛЕКТРОМЕХАНИЧЕСКИХ СИСТЕМ
---------------------------------------------------
ВВЕДИТЕ ТИП ИССЛЕДУЕМОЙ СИСТЕМЫ УПРАВЛЕНИЯ:
1 - СПР
2 - АКОР
3 - ОКСУ
1
--------------------------------
ВВОД БАЗОВЫХ ВЕЛИЧИН:
Введите число двигателей n=
n=2
Введите напрjaжение управления номинальное Uyn=
Uyn=10
Введите ток возбуждения номинальный ivn=
ivn=10.1
Введите напяжение возбуждения номинальное Uvn=ivn*Rv
Uvn=64
Введите максимальный ток двигателя Idmax=
Idmax=428
Введите угловую скорость двигателя номинальную wdn=
wdn=88.96
Введите конструктивную постояннную двигателя С=(Udn-idn*Rd)/wdn
C=2.5
Суммарная конструктивная постояннная равна Cs
Cs =
5
Момент максимальный Mdmax=
Mdmax =2140
-----------
ВВОД ДОПОЛНИТЕЛЬНЫХ ВЕЛИЧИН НЕОБХОДИМЫХ ДЛЯ МОДЕЛИРОВАНИЯ:
Введите величину зазора d=
d=1.57
Введите момент инерции первой массы J1s=
т.е момент инерции двигателей и редуктора
J1s=3.36
Введите момент инерции второй массы J2=
J2=33.6
момент инерции одномассовой системы
Js =
3.6960e+001
Введите эквивалентную жесткость с12=
c12s=7100
Введите коэффициент вязкого трения vz=0.01*c12
vz=71
Введите сопративление обмотки возбуждения Rv=
Rv=2.34
Введите коэффициент передачи возбудителja
Kv=Kf*Rv*ivn/Uyn
Kv=1.95
Введите коэффициент передачи генератора Kg=(Udn*n)/ivn
Kg=55
Введите постоянную времени генератора Tg=Lv/Rv
Tg=1.5
Введите коэффициент сопротивление якорной цепи Ra=
Ra=0.16
Введите постоянную времени якорной цепи Ta=La/Ra
Ta=0.061
Нажмите "1" чтобы исправить ошибку
или
Нажмите любую другую клавишу длja продолжениja
ВВЕДИТЕ ТИП ИССЛЕДУЕМОЙ СПР:
1 - техконтурная СПР
2 - двухконтурная СПР с ПИД регулятором тока
3 - пятиконтурная СПР
4 - четырехконтурная СПР
я выбираю вариант №2
------------------------------
ПАРАМЕТРЫ ДВУКОНТУРНОЙ СПР
------------------------------
kot = 2.3364e-002
kow = 1.1241e-001
kow1 = 1.1241e-001
koy = 4.6729e-003
kow2 = 1.1241e-001
ПИД-регулятор тока якорной цепи P+I/s+D*s
коэффициенты P I D соответственно равны
ans = 1.1662e+001
ans = 7.4705e+000
ans =6.8355e-001
П-регулятор скорости P
коэффициент P равен
ans = 3.8411e+001
>>

5. Косу с коррекцией питающего напряжения и оптимальной обратной связью по току якорной цепи.
Если в системе Г-Д рассмотреть контур питающего напряжения, в котором производится коррекция питающего напряжения, т.е. за счет регулятора питающего напряжения компенсируем большую постоянную времени Тг, в результате этого по быстродействию приближаем систему Г-Д к системе ТП-Д в пределах допустимого коэффициента форсировки. Чем больше коэффициент форсировки, тем быстрее происходит переходный процесс.
При введении контура питающего напряжения регулятор питающего напряжения:

Передаточная функция замкнутого контура питающего напряжения:
 .
.
ПренебрегаяТμ
получаем
 .
.
 =
=


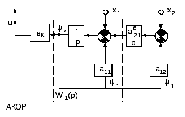
В результате введения контура питающего напряжения расчетная схема примет следующий вид:

Баланс напряжений якорной цепи можно записать в следующем виде:

Умножив и разделив каждую переменную на их базовое значение получим:

 .
.
Дополнив последнее уравнение 3-мя уравнениями, описывающими wд, Му, w2 получим систему уравнений:
 (5.1)
(5.1)
Таким образом, система уравнений (5.1) – математическое описание ЭМС с приводом Г-Д.

 =
=















Математическое описание, как следует из (6.1) представляет систему из 4-х уравнений, на одно уравнение понизили, как в системе с ЭП ТП-Д, поэтому динамика полученной системы будет приближаться к ТП-Д.
Структурная схема объекта управления (в относительных единицах) будет иметь следующий вид:

Для синтеза, а также если имеется возможность получить информацию по току якорной цепи и скорости двигателя, то ЭМС рассматривают как одномассовую, и тогда математическое описание представляет собой систему 2-х дифференциальных уравнений:
 (5.2)
(5.2)
Система уравнений (6.2) – математическое описание системы регулирования.

Воспользуемся вычислительной процедурой принципа максимума Л.С. Понтрягина.
Критерий оптимальности имеет вид:

Составим функцию Гамильтона:
 ,
,
где F – подынтегральная функция критерия оптимальности.

Возьмем
производную функции Гамильтона по
управлению и приравняем ее к нулю:
 .
.
Получим


Для
того чтобы найти
 и
и необходимо составить систему сопряженных
уравнений:
необходимо составить систему сопряженных
уравнений: .
.
 (5.3)
(5.3)
По системе уравнений (4.3) составляем структуру АКОР:
 .
.
Структурная схема электропривода КОСУ по iа, w1:

Таким образом, получили структуру оптимального ЭП с коррекцией питающего напряжения, в котором регулятор рассчитан по методу технического оптимума и АКОР по току якоря iа и скорости двигателя w1. В данном виде полученная схема напоминает трехконтурную систему подчиненного регулирования (СПР) с внешним контуром скорости и подчиненным контуром тока с внутренней обратной связью.
В
АКОР апериодическое звено
 выполняет
роль регулятора тока, а интегрирующее
звено
выполняет
роль регулятора тока, а интегрирующее
звено выполняет роль регулятора скорости.
выполняет роль регулятора скорости.
Пусть математическое описание объекта регулирования представляет систему 2-х дифференциальных уравнений:


Рассмотрим влияние критерия оптимальности на величину коэффициентов оптимальных обратных связей. Синтез алгоритма оптимального управления осуществляем методом динамического регулирования. Метод динамического регулированияпредполагает дифференцируемость критерия оптимальности и уравнение Беллмана записывается в частных производных. Особенностью метода является то, что для рассматриваемого критерия оптимальности в виде АКОР (минимизация квадратичных отклонений) легко решается непосредственно задача синтеза, которая реализуется в виде линейных коэффициентов от координат системы, что позволяет получить простейший регулятор.
Критерий оптимальности:
 .
.
Методика
заключается в том, что вводится некоторая
функция Беллмана:
 .
.
В общем случае уравнение Беллмана записывается в следующем виде:
 (5.4)
(5.4)
Учитывая требования минимизации выражения в квадратных скобках по управляющему воздействию, запишем уравнение Беллмана в виде следующей системы:
 (5.5)
(5.5)
Для нашего случая уравнение Беллмана:

Последнее уравнение можно представить в виде следующей системы:
 (5.6)
(5.6)
Из
1-го уравнения:
 (а)
(а)
Подставим его во 2-ое уравнение системы (4.6):

 (5.7)
(5.7)
Уравнение (6.7) – оптимизированное уравнение Беллмана.
Для данного критерия доказано, что функция Беллмана ищется в виде квадратичной функции неизвестных коэффициентов.
Функция Беллмана:

С
учетом того, что
 функция
Беллмана в нашем случае ищется так:
функция
Беллмана в нашем случае ищется так:
 .
.
Находим производные функций Беллмана по координатам:

Подставляем
 и
и в оптимизированное уравнение Беллмана:
в оптимизированное уравнение Беллмана:

Из
полученного уравнения выписываем
коэффициенты при ,
при
,
при и
и ,
получаем
,
получаем

 (5.8)
(5.8)
Из
второго уравнения системы (6.8) определяем
значение
 :
:



D=211,42+4*9898*0,5=64486


Подставляем
найденные в 1-ое уравнение системы и находим 4
значения
в 1-ое уравнение системы и находим 4
значения .
.
1)


D=32,62+4*9898*0,47=19671

2)



D=32,62+4*9898*0,5=20859


Выбираем
из всех значений
 только
только ,
т.е.
,
т.е. ;
; .
.
Подставляем
 и значения
и значения в 3-е уравнение системы (5.8):
в 3-е уравнение системы (5.8):
1)
 ;
; .
.




2)
 ;
; .
.


-0,17-1,23-0,15


Выберем
те значения
 и
и ,
которые удовлетворяют условию:
,
которые удовлетворяют условию:

Сведем
в таблицу значения ,
, и
и :
:
|
|
| ||
|
|
|
|
|
|
--------- |
|
----------- |
|








Таким образом

Подставим
значения
 в уравнение (а):
в уравнение (а):

ν1 – коэффициент оптимальной обратной связи по току;
ν2 – коэффициент оптимальной обратной связи по скорости.

V1=2*вк*
V2=2*вк*