

lukyanov-взрывные работы
.pdfного устройства. При нажатии на кнопку клапан открывает выход воздуха из цилиндра колонки наружу, и молоток опускается вниз.
Таблица 1.4
Техническая характеристика колонковых перфораторов
Тип |
ПК-50 |
ПК-60 |
ПК-75 |
ПК-120 |
ПК-150 |
ПК-175 |
|
|
|
|
|
|
|
|
|
Энергия удара, Дж |
88,26 |
88,26 |
147,1 |
88,26 |
196,26 |
245,17 |
|
|
|
|
|
|
|
|
|
Крутящий момент, Н·м |
49 |
160 |
255 |
343 |
343 |
343 |
|
|
|
|
|
|
|
|
|
Частота ударов, с-1 |
33,4 |
45 |
37 |
41,7 |
33,3 |
33,3 |
|
Расход воздуха, м3/мин |
5,7 |
9,2 |
12,7 |
10,3 |
15,1 |
17,9 |
|
Номинальное давление |
0,5 |
0,5 |
0,5 |
0,5 |
0,5 |
0,5 |
|
воздуха, МПа |
|||||||
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
Диаметр шпуров, мм |
40...65 |
40...65 |
40...85 |
40...52 |
65...85 |
65...85 |
|
|
|
|
|
|
|
|
|
Глубина бурения, м, в |
12 |
25 |
50 |
– |
– |
– |
|
породах с крепкостью f: |
|||||||
|
|
|
|
|
|
||
10 |
8 |
17 |
30 |
– |
– |
– |
|
11…15 |
5 |
10 |
15 |
– |
– |
– |
|
16 |
– |
– |
– |
5 |
50 |
50 |
|
20 |
|||||||
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
Масса, кг |
50 |
60 |
75 |
120 |
150 |
175 |
|
|
|
|
|
|
|
|
При бурении шпуров с промывкой вода через специальный штуцер подаётся в полость задней головки и в промывочную трубку.
Основным направлением повышения производительности труда и улучшения санитарно-гигиенических условий работы бурильщика является механизация и автоматизация всех операций при бурении. При этом улучшаются технико-экономические показатели буровых работ. Механизация и автоматизация операций при бурении осуществляется с помощью применения усовершенствованных конструкций распорных колонок, самоходных буровых кареток с управляемыми манипуляторами, автоматических подающих механизмов и автоматических систем смазки.
31
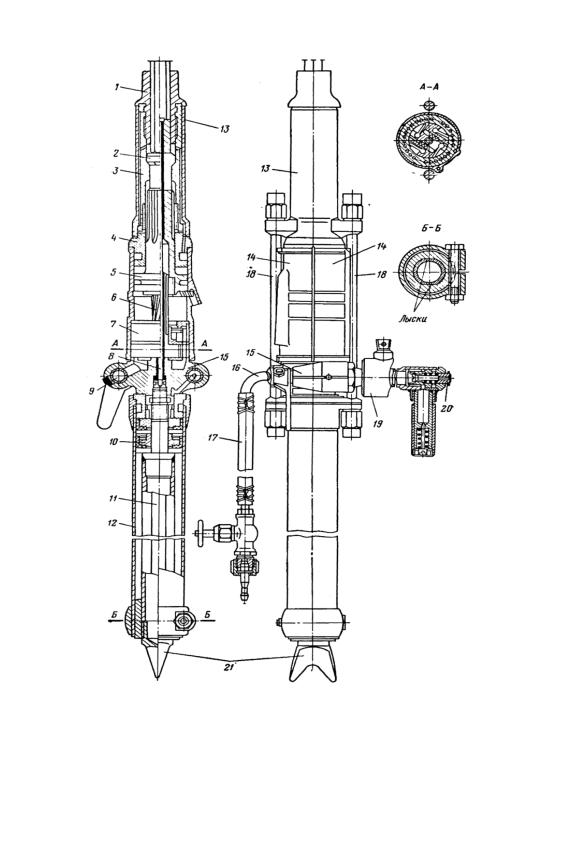
Рис. 1.12. Телескопный перфоратор:
1 – грундбукса; 2 – боёк; 3 – поворотная букса; 4 – направляющая втулка; 5 – поршень; 6 – поворотный винт; 7 – воздухораспределение;
8 – водоподающая трубка; 9 – воздуховпускной кран; 10 – головка поршня; 11 – шток поршня; 12 – цилиндр телескопа; 13 – патрон; 14 – цилиндр;
15 – головка молотка; 16 – водоподающий патрубок; 17 – шланг водяной; 18 –1стяжные.1.1. Механизацияболты; 19 – автомаслёнкаи автоматизация; перфо-
20 – разгрузочный клапанраторноготелескопа; 21бурения– упор
32
Таблица 1.5
Техническая характеристика телескопных перфораторов
Тип |
ПТ-29 |
ПТ-38М |
ПТ-48 |
|
|
|
|
|
|
Глубина бурения, м |
– |
до 4 |
до 15 |
|
|
|
|
|
|
Диаметр шпуров, мм |
– |
30…40 |
52…85 |
|
Энергия удара, Дж |
44 |
49 |
86,3 |
|
|
|
|
|
|
Крутящий момент, Н·м |
20 |
19,6 |
32,3 |
|
|
|
|
|
|
Частота ударов, с–1 |
– |
43,3 |
43,3 |
|
Величина подачи телескопного |
– |
650 |
650 |
|
устройства, мм |
||||
|
|
|
||
Осевое усилие телескопа, Н |
– |
1300 |
1750 |
|
|
|
|
|
|
Расход воздуха, м3/мин |
– |
3,4 |
5,9 |
|
Масса, кг |
40 |
38 |
48 |
Распорные колонки с механизированной перестановкой перфоратора приведены на рис. 1.13. Поднятие или опускание кронштейна вместе с установленным на нём автоподатчиком с перфоратором производится с помощью резьбы на поверхности колонки и гайки (вариант а), рычажно-храпового устройства (вариант б) и домкрата, устанавливаемого на колонке (вариант в).
Буровые каретки изготовляются самоходными и несамоходными на один или несколько перфораторов, на гусеничном, колёсном рельсовом или резиновом ходу, работающие на пневматической и электрической энергии.
Впоследние годы для комплексной механизации отдельных видов горных работ разрабатываются комплексы машин. Для комплексной механизации работ по проведению горных выработок разработаны комплексы, включающие буровые каретки, погрузочное и транспортное оборудование. В комплексе, разработанном НИПИгормаш, имеется самоходная буровая каретка СБКН-2П на пневмошинном ходу. На манипуляторах установлены автоподатчики с перфораторами. Управление рабочей и ходовой частью каретки осуществляется с пульта управления.
Встеснённых подземных условиях более производительным является оборудование, обеспечивающее поворот на 360° вокруг собственной оси на месте стояния. Таким качеством обладают гусеничные ходовые тележки с отдельным приводом для каждой гусеницы, а также колесные с отдельными двигателями для правого и левого колёс. Чем больше маневренность оборудования, тем выше коэффициент его использования.
33
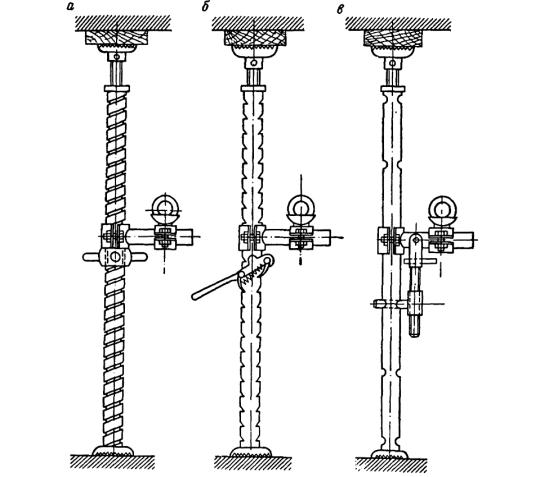
Рис. 1.13. Распорные винтовые колонки для перфоратора с механизированной перестановкой бурильной машины:
а– при помощи винта и гайки;
б– при помощи рычажно-храпового устройства;
в– при помощи винтового домкрата, установленного на колонке
1.1.4. Манипуляторы
Манипуляторы одни из основных механизмов, механизирующих тяжелую операцию перестановки перфоратора. Манипуляторы можно монтировать на буровых каретках, на корпусах погрузочных машин и на распорных колонках. Известно большое количество различных конструкций манипуляторов. По принципу работы привода их можно разделить на механические, гидравлические, пневматические и комбинированные (рис. 1.14)
Механические манипуляторы (рис. 1.14, а) операцию подъема или перемещения стрелы с автоподатчиком и перфоратором производят с помощью винтового, реечного или канатно-подъёмного механизма
34
(домкрата), обеспечивая жесткую фиксацию буровой машины в заданном рабочем положении.
Гидравлические манипуляторы обладают наиболее высокими эксплуатационными качествами. Механизируя все вспомогательные операции при бурении, они легко могут быть переведены на управление с некоторого расстояния (дистанционное), что улучшает условия работы бурильщика, так как в этом случае исключается вредное действие на человека вибраций буровой машины и немного снижается воздействие шума. На рис. 1.14, б приведена кинематическая схема гидравлического манипулятора, обеспечивающего перемещение и установку автоподатчика с перфоратором в любом положении. Масло под давлением подаётся от гидронасосной установки, смонтированной на буровой каретке, в цилиндры гидродомкратов.
Пневматические манипуляторы (рис. 1.14, в) также могут обес-
печить механизацию вспомогательных операций при перфораторном бурении. Однако здесь для фиксирования перемещаемого элемента в заданном положении требуются зажимы или фиксаторы. Если при работе требуется сохранить автоподатчик с перфоратором в заданном положении при перемещении стрелы манипулятора, то применяются коррек-
торы (1.14, г).
Автоподатчики автоматизируют операцию подачи пневматического перфоратора вперед при бурении и назад после окончания бурения.
Автоподатчики по принципу работы можно разделить на следующие группы и подгруппы:
1.Телескопные автоподатчики: а) с неподвижным поршнем;
б) с неподвижным цилиндром и движущимся поршнем; в) шагающие; г) канатные.
2.Моторные автоподатчики:
а) с подающим винтом и гайкой; б) с подающей цепью.
3.Вибрационные автоподатчики.
4.Дифференциально-винтовые автоподатчики.
По применяемой энергии автоподатчики бывают пневматические, электрические, гидравлические или комбинированные пневмогидравлические и электрогидравлические. Практическое значение в настоящее время имеютавтоподатчики, работающиенапневматическойэнергии.
35
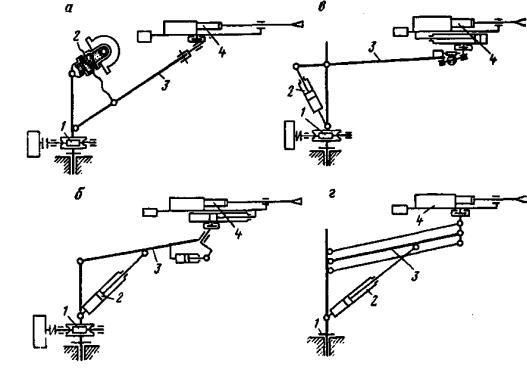
Рис. 1.14. Кинематические схемы манипуляторов:
а– механический; б – гидравлический; в – пневматический;
г– пневматический с корректором; 1 – механизм поворота в горизонтальной плоскости; 2 – механизм подъёма и опускания; 3 – стрела; 4 – автоподатчик с перфоратором
Кинематические схемы автоподатчиков показаны на рис. 1.15. Телескопный автоподатчик с неподвижным поршнем, полый шток
которого крепится в корпусе воздуховпускной коробки, получает сжатый воздух от шахтного воздухопррвода через шланг и внутреннюю полость коробки крана (рис. 1.15, а). Если окно а совпадает с каналом полого штока, то сжатый воздух попадает в переднюю полость цилиндра, заставляя последний двигаться вперед. В это время задняя полость цилиндра с помощью выточки на пробке и кольцевой полости, имеющейся между внутренней и наружной трубками штока, через выпускное окно сообщается с атмосферой.
При повороте ручки крана в положение II сжатый воздух пойдет в заднюю полость цилиндра, производя реверсирование подачи, передняя полость цилиндра через выточку в пробке крана и окно будет поставлена на выхлоп воздуха. При слишком большом усилии подачи, развиваемой автоподатчиком, вызывающем снижение работоспособности
36
перфоратора, давление воздуха в цилиндре можно понизить, нажимая кнопку разгрузочного клапана б.
Величина усилия подачи, развиваемого механизмом, определяется по формуле
′ |
(1.22) |
C = kFР η, кгс, |
где k – коэффициент потерь давления воздуха, равный 0,85…0,9; F – рабочая площадь поршня, см2; Р' – среднее рабочее давление воздуха в цилиндре телескопа, принимаемое, равным 0,85…0,90 от манометрического давления сжатого воздуха, МПа; η – КПД механизма, обычно равный
0,8…0,9.
Телескопный автоподатчик с неподвижным цилиндром имеет подвижный поршень, шток которого соединен с держателем перфоратора (рис. 1.15, б). Питание сжатым воздухом передней и задней полости цилиндра производится через трубки а и б. При I положении ручки воздушного крана происходит подача перфоратора вперед, при II положении ручки – подача назад.
Телескопный шагающий автоподатчик (рис. 1.15, в) имеет небольшую длину подачи (150…300 мм). При работе шток поршня упирается упором в планки, имеющиеся на салазках, цилиндр передвигается вперед вместе с перфоратором на длину подачи. Затем поршень втягивается в цилиндр, делая шаг, и процесс возобновляется.
Автоматическое шагание осуществляется с помощью золотникового воздухораспределения.
Усилие подачи вперед, развиваемое шагающим телескопом, можно определить по формуле
|
C = kР′(F1 −F2 )η. |
(1.23) |
||||||
При этом |
|
|
|
|
|
|
|
|
F |
= |
πD2 |
; |
F |
= |
π |
(D2 −d 2 ) , |
(1.24) |
|
|
|||||||
1 |
4 |
|
2 |
4 |
|
|
||
|
|
|
|
|
||||
где D – диаметр цилиндра в см; d – диаметр штока, см.
37
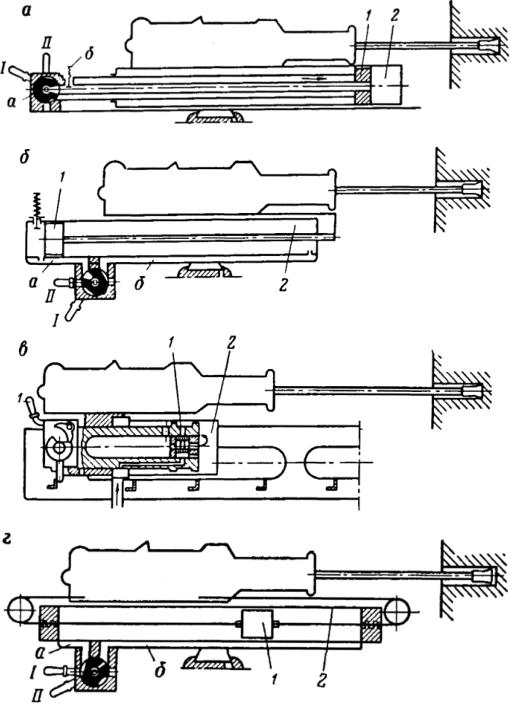
Рис. 1.15 (начало). Кинематические схемы автоподатчиков:
а – телескопный с неподвижным поршнем: 1 – поршень; 2 – цилиндр; б – телескопный с неподвижным цилиндром и движущимся поршенем:
1 – поршень; 2 – держатель; в – телескопный, шагающий:
1 – поршень; г – пневматический канатный: 1– канатик; 2 – поршень;
38
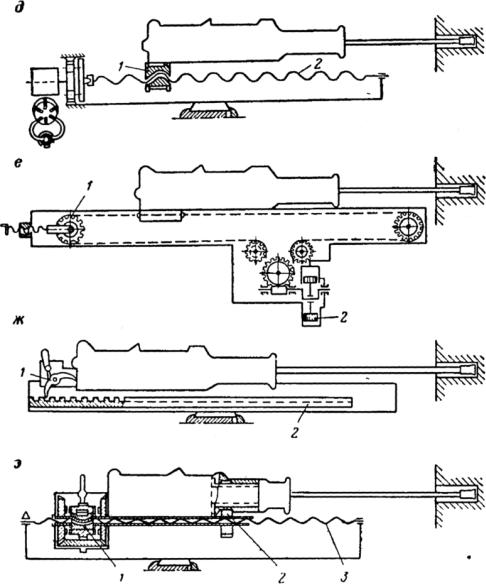
Рис. 1.15 (окончание). Кинематические схемы автоподатчиков:
д – моторный, винтовой: 1 – гайка подачи; 2 – винт; е – моторный цепной: 1 – цепная передача; 2 – мотор; ж – вибрационный:
1 – переключатель подачи; 2 – рейка зубчатая; з – дифференциальный винтовой: 1 – гайка подачи; 2 – привод подачи; 3 – винт
Телескопный канатный автоподатчик имеет вместо штока – канат (рис.1.15, г). Канат крепится к головке поршня, проходит через уплотнённые отверстия в крышках цилиндра и присоединяется к держателю перфоратора.
39
Сжатый воздух с помощью крана направляется по каналам трубок а и б в правую или левую полость цилиндра телескопа, создавая соответствующее перемещение головки поршня и подачу перфоратора. При конструировании телескопных автоподатчиков расчёт основных параметров производится, исходя из полной величины усилия подачи.
Моторный винтовой автоподатчик оснащен роторным призматическим двигателем, вращательное движение которого преобразуется с помощью винтовой пары в поступательное движение перфоратора
(рис.1.15, д).
Величину усилия подачи, развиваемого механизмом, можно определить по формуле
C = |
2M η |
, |
(1.25) |
dc tgα |
|||
где М – величина крутящего |
момента по подающей |
гайке, кН; |
|
dс – средний диаметр винта подачи, см; α – угол подъёма резьбы, градус; η – КПД механизма.
Величина крутящего момента может быть замерена или оп-
ределена по формуле |
|
|
|
|
M = 71620 |
N |
, |
(1.26) |
|
n |
||||
|
|
|
||
где N – мощность мотора автоподатчика, кВт; п – число оборотов |
||||
гайки в 1 мин. |
|
|
|
|
Скорость подачи |
|
|
|
|
υп = t · n , |
|
(1.27) |
||
где t – шаг винта, см.
Моторный цепной автоподатчик (рис. 1.15, е): вращательное движение от мотора через червячный редуктор передается на ведущую звёздочку пластинчатой цепи. Цепь, прикрепленная концами к держателю перфоратора, перемещает его вперед или назад в зависимости от направления движения, создаваемого мотором. Натяжение цепи регулируется натяжным устройством. Усилие подачи, развиваемое автоподатчиком, можно определить по формуле
C = |
75Nη |
. |
(1.28) |
υп |
Скорость подачи, которую может развивать автоподатчик, определится по формуле
40