

1.5 Расчет мощности и выбор электродвигателя ленточного наклонного конвейера удаления бруса
М5 - двигатель ленточного наклонного конвейера удаления бруса, трехфазный, асинхронный с к.з.р.
Ленточный наклонный конвейер удаления бруса: производительность конвейера – 12,0 т/ч; длина конвейера – 20 м; длина перемещения бруса по конвейеру – 15 м; высота подъёма конвейера – 4 м; передача – цепная; ширина ленты конвейера – 0,5 м; скорость движения ленты конвейера – 1,2м.
Режим работы продолжительный (S1).
Мощность горизонтального конвейера рассчитываем по формуле:
![]() (1.7)
(1.7)
где: Q– производительность конвейера (т/ч),
η – кпд передачи,
H– высота подъема бруса (м),
L1– длина транспортера (м),
L2– длина перемещения груза по транспортеру (м),
ν – скорость перемещения ленты транспортера (м/с),
A=0,03;B=0,13;C=1,5 – коэффициенты зависящие от ширины ленты,
![]() – коэффициент, учитывающий увеличение
сопротивления при пуске (от 1,2 до 1,5).
Возьмем
– коэффициент, учитывающий увеличение
сопротивления при пуске (от 1,2 до 1,5).
Возьмем![]() ,
,
![]() – коэффициент, учитывающий дополнительные
потери мощности, при длине конвейера
до 30 метров
– коэффициент, учитывающий дополнительные
потери мощности, при длине конвейера
до 30 метров![]() .
.
По формуле (1.7) получим:
![]() Выбираем
рольганговый двигатель ленточного
наклонного конвейера удаления бруса,
трехфазный, асинхронный с к.з.р.: АРМ53-6
(P=3(кВт),nс=1000
(об./мин.)).
Выбираем
рольганговый двигатель ленточного
наклонного конвейера удаления бруса,
трехфазный, асинхронный с к.з.р.: АРМ53-6
(P=3(кВт),nс=1000
(об./мин.)).
Таблица 5 – Технические данные двигателя АРМ53-6
|
Тип двигателя |
Pн (кВт) |
η% |
cosφ |
n(об./мин.) |
Мп(Н*м) |
Iп(А) |
|
АРМ53-6 |
3 |
77 |
0,79 |
900 |
102 |
32 |
Найдем степень загруженности двигателя:
![]() .
.
Степень защиты двигателя IP54.
Рассчитаем номинальный ток:
Iн=7,6 (А).
Рассчитаем номинальный момент по формуле (1.3):
Mн=9570*3/900=31,9 (Н*м).
1.6 Выбор электрогидротолкателя тормоза пильного шкива вертикальной ленточной пилы
М6 – электрогидротолкатель (ЭГТ) тормоза пильного шкива вертикальной ленточной пилы, трехфазный, асинхронный с к.з.р.
Электрогидротолкатель (ЭГТ) тормоза пильного шкива вертикальной ленточной пилы: требуемое усилие на расжатие колодок тормоза – 450 Н.
Выбираем тип электрогидротолкателя:
Таблица 6 – тип ЭГТ
|
Тип толкателя |
Номинальное усилие подъема (Н) |
Максимальное усилие подъема (Н) |
Номинальный ход штока (мм) |
Время подъема штока, не более (с) |
Время обратного хода штока (с) |
Потребляемая мощность (кВт) |
Масса (кг) |
|
ЭГТ-50 |
500 |
620 |
65 |
0,55 |
0,4 |
0,19 |
17,5 |
Данный тип ЭГТ имеет встроенный двигатель.
2Разработка силовой схемы
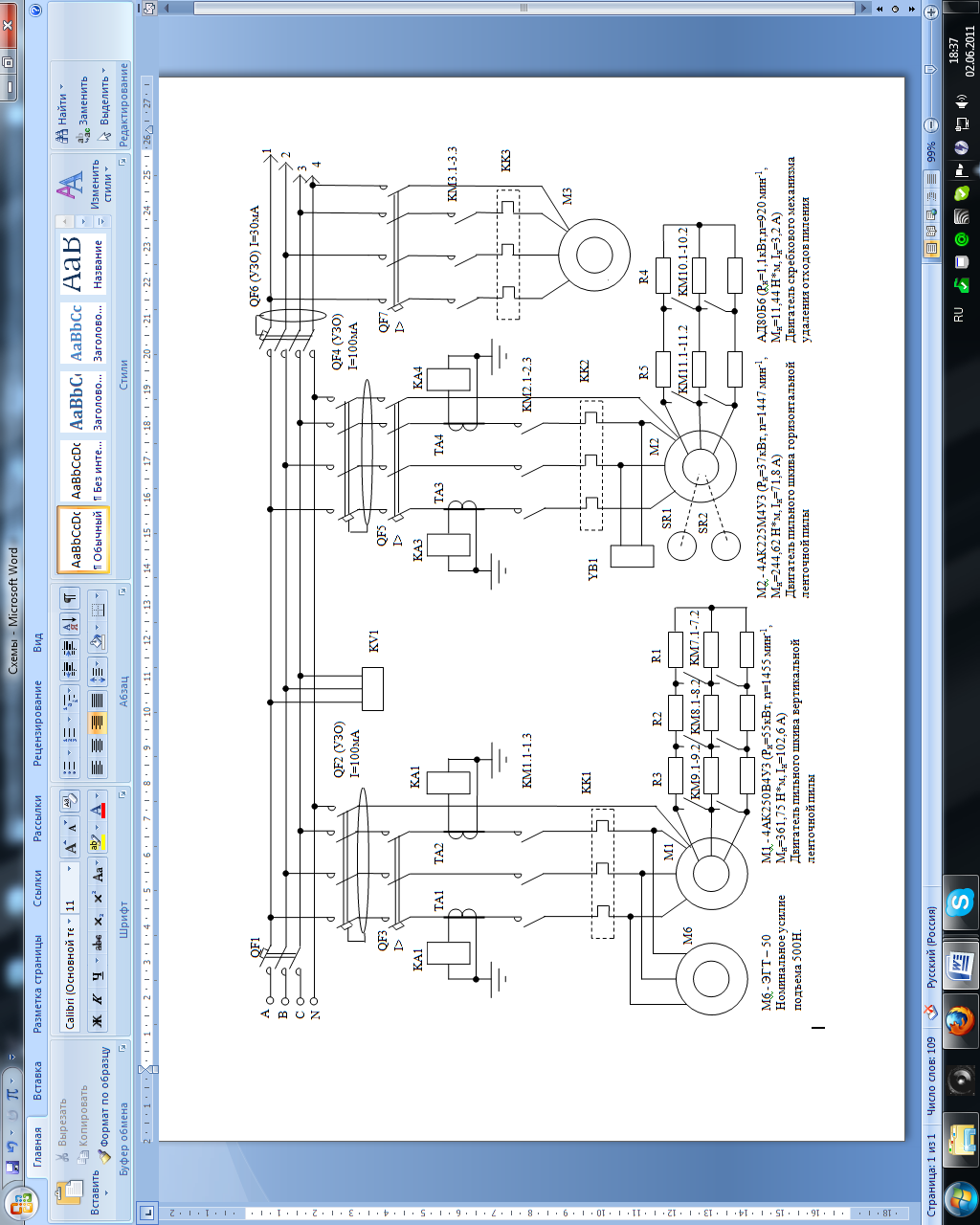
Рисунок 4 – Силовая схема, двигатели М1, М2, М3, М6


Рисунок 5 – Силовая схема, двигатели М4, М5


Рисунок 6 – Схема управления производственной установкой принципиальная


Рисунок 7 – Схема сигнализации принципиальная
Р азработанная
принципиальная электрическая схема
обеспечивает:
азработанная
принципиальная электрическая схема
обеспечивает:
Дистанционный пуск и останов всех электроприводов производственной установки. Пуск двигателя М1 (двигатель пильного шкива вертикальной ленточной пилы) осуществляется кнопкой SB2, остановSB1. Пуск двигателя М2 (двигатель пильного шкива горизонтальной ленточной пилы) кнопкойSB4, остановSB3. Пуск двигателя М3 (скребкового конвейера удаления отходов пиления) кнопкойSB6, остановSB5. Пуск М5 (ленточный наклонный конвейер удаления бруса) кнопкойSB8, остановSB7. Пуск М4 (двигатель цепного горизонтального конвейера подачи бревен) при прямой подачи бревен кнопкойSB10, при обратнойSB11, остановSB9.
Для электроприводов ленточных пил, для плавного разгона, выбраны двигатели с фазным ротором. Разгон двигателя М1 осуществляется в функции времени, имеется три ступени разгона. Время разгона устанавливается с помощью реле времени KT1 –KT3. Разгон двигателя М2 осуществляется в функции скорости, имеется две ступени разгона. Срабатывания контакторовKM10 –KM11 происходит при срабатывании реле контроля скоростиSR1 –SR2.
Работа электроприводов в двух режимах: I– режим «Работа»,II– режим «Наладка». При установке ключаSA1 в режим «Работа» действуют все технологические блокировки и защиты, при установке ключаSA1 в режим «Наладка» происходит снятие защитных и технологических блокировок.
При установке режима «Работа» осуществлена возможность запуска двигателей М1 и М2 только после включения двигателей М3 и М5 и закрытия двухстороннего охранного заграждения ленточных пил. Возможность включение двигателя М4 только при работе двигателей М1 и М2 на номинальной механической характеристике (по окончании разгона) в режиме «Работа».
Включение электрогидротолкателя М6 и электромагнитного тормоза YB1 одновременно с М1 и М2 соответственно одним магнитным пускателем.
В связи с тем, что все электродвигатели работают в продолжительном (S1) режиме осуществлена тепловая защита электродвигателей посредством установки тепловых реле (КК1 – КК5).
Осуществление максимально токовой защиты электродвигателей и схемы управления с помощью автоматических выключателей: QF1,QF3,QF5,QF7,QF8,QF9,QF10,SF2.
Защита от токов утечки с помощью устройства защитного отключения (УЗО): QF2,QF4,QF6,SF1.
Выполнена светосигнальная сигнализация состояния электродвигателей: «привод включен» - «привод отключен», сигнализация направления вращения электропривода М4, сигнализация окончания разгона М1 и М2.
И меется
наличие звуковой сигнализации перегрузки
двигателей М1 и М2 действующей с задержкой
включения, устанавливаемой реле времениKT4.
меется
наличие звуковой сигнализации перегрузки
двигателей М1 и М2 действующей с задержкой
включения, устанавливаемой реле времениKT4.
Защита электроустановки от снижения или повышения напряжения питания, обрыва фаз осуществляется с помощью реле трехфазного напряжения KV1.
Имеется лампа местного рабочего освящения на 36 вольт, включаемая через понижающий трансформатор напряжения. Включение - отключение лампы осуществляется ключом управления SA2 имеющим два положения (замкнут в положении «I»).