

Заключение
В данной курсовой работе были рассчитаны эквивалентные мощности и моменты для электродвигателей по нагрузочным диаграммам и по формулам. Далее выбраны двигатели и проверены на перегрузку.
Была разработана схема управления электроприводом производственной установкой, отвечающая заданным функциям и отвечающая условиям безопасности работы. Подобраны аппараты управления, защиты, сигнализации.
Разработаны логические схемы управления электроприводами на базе универсальных логических модулей LOGO!
Библиографический список
Драчёв В.А. Электромеханические системы автоматики: Электропривод: расчёт, выбор и управление: Учебное пособие по изучению раздела «Автоматизированный электропривод» и выполнению курсового и дипломного проектирования для студентов специальности 210200 всех форм обучения. – Красноярск: СибГТУ, 2005. - 200с.
Драчёв В.А., Драчёва З.А. Автоматизированный электропривод: Методические указания к выполнению лабораторных работ для студентов специальности 210200 всех форм обучения.- Красноярск: СибГТУ, 2000.
Драчёв В.А. Электромеханические системы автоматизации. Учебное пособие к выполнению курсового и дипломного проектирования для студентов всех форм обучения специальности 210200 всех специализаций. Часть 1. –Красноярск: СибГТУ, 2002. – 32 с.
Драчёв В.А. Электромеханические системы автоматизации. Учебное пособие к выполнению курсового и дипломного проектирования для студентов всех форм обучения специальности 210200 всех специализаций. Часть 2. –Красноярск: СибГТУ, 2002. – 32 с.
Башарин А.В., Новиков В.А., Соколовский Г.Г. Управление электроприводами: Учебное пособие для вузов. – Л.: Энергоиздат. Ленингр. отд-ние, 1982. – 392с., ил.
Приложение
К инематическая
схема установки
инематическая
схема установки
Для представления внешнего вида и принципа работы электроустановки составим кинематическую схему:
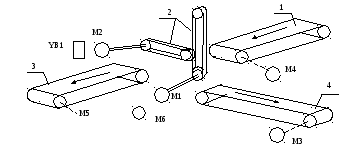
Рисунок 13 – Кинематическая установка
М1 – Двигатель пильного шкива вертикальной ленточной пилы.
М2 – Двигатель пильного шкива горизонтальной ленточной пилы.
М3 – Двигатель скребкового конвейера удаления отходов пиления.
М4 – Двигатель цепного горизонтального конвейера подачи бревен.
М5 - двигатель ленточного наклонного конвейера удаления бруса.
М6 – Электрогидротолкатель тормоза пильного шкива вертикальной ленточной пилы.
YB1 – Электромагнит тормоза пильного шкива горизонтальной ленточной пилы.
Принцип работы ленточнопильного агрегата продольного раскроя древесного баланса:
Бревно подается по цепному конвейеру подачи бревен (1) на ленточные пилы (2). Далее после раскроя, готовый продукт (брус) удаляется по наклонному ленточному конвейеру (3), отходы пиления удаляются скребковым конвейером (4).