

13.4 Derivation of Pertinent Aircraft Performance Equations |
425 |
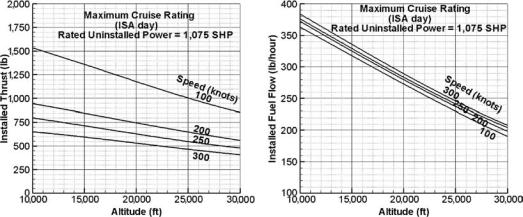
Figure 13.7. Thrust and fuel flow at maximum cruise rating
30,000 ft. Progressing as in the climb performance, the maximum cruise thrust and fuel-flow rate can be computed. A sample computation at a 30,000-ft altitude is in Table 13.3 using a 4% loss of thrust due to installation effects.
Figure 13.7 plots the available installed thrust and fuel flow at the maximum cruise rating. The initial maximum cruise speed in the example is 320 mph (270 kts) at a 25,000-ft altitude.
13.4 Derivation of Pertinent Aircraft Performance Equations
This section derives the relevant performance equations used in this book. For more details, readers may consult references [2] through [6].
Using the engine and aircraft data developed thus far during the conceptual design phase, the next section verifies whether the configured aircraft satisfies the airworthiness (i.e., FAR) and customer requirements in the takeoff/landing, the initial climb rates, and the maximum initial cruise speed, as well as the payload-range capability (i.e., civil aircraft). Certifying agencies have mandatory requirements to ensure safety at takeoff and landing. Airworthiness regulations differ among countries. For further details, readers may refer to the respective regulation – most of which appear in the official Web sites.
13.4.1 Takeoff
During a takeoff ground run, an aircraft under maximum thrust accelerates, gaining speed until a suitable safe speed is reached. The pilot then initiates rotation of the aircraft by gently pulling back the control stick or wheel (i.e., the elevator is going up) for a liftoff.
Designers must know the sequence of the takeoff speed schedules stipulated by the certifying agencies. To ensure safety, the agencies demand mandatory requirements for taking off with one engine inoperative to clear a 35-ft height that represents an obstacle. A one-engine inoperative TOFL is computed by considering the balanced field length (BFL) when the stopping distance after an engine failure at
426 |
Aircraft Performance |
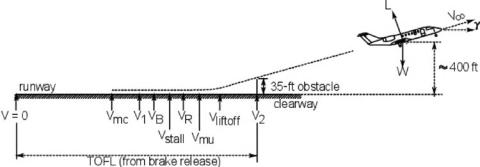
Figure 13.8. Takeoff, firstand second-segment climb
the decision speed, V1, is the same as the distance taken to clear the obstacle at the MTOM (Figure 13.8). Figure 13.8 gives the various speed schedules during a takeoff run, which are explained as follows:
V1: This is the decision speed. An engine failure below this speed would result in an aircraft not being able to satisfy takeoff within the specified field length but able to stop. If an engine fails above the V1 speed, the aircraft should continue the takeoff operation.
Vmc: This is the minimum control speed at which the rudder is effective to control the asymmetry created by a one-engine failure. It should be lower than V1; otherwise, at the loss of one engine at V1, an aircraft cannot be controlled if it continues the takeoff operation.
VR: This is the speed at which a pilot initiates the action to rotate an aircraft for liftoff; it should be ≥1.05Vmc. Once this is accomplished, reaching VLO and V2 occurs as an outcome of the action. VR should be more than
Vstall.
Vmu: There is a minimum “unstick” speed, above which an aircraft can be made to lift off. The speed should be slightly above VR. In fact, Vmu determines VR. If a pilot makes an early rotation, then Vmu may not be sufficient for liftoff and the aircraft tail drags until it gains sufficient speed for liftoff.
VLO: This is the speed at which the aircraft lifts off the ground; it is closely associated with VR. If one engine is inoperative, it should have a VLO ≥ 1.05Vmu.
V2: This is the takeoff climb speed at a 35-ft height, also known as the firstsegment climb speed; it is also closely associated with VR. FAR require that V2 = 1.2Vstall (at a minimum; it can be higher).
VB: This is the brake-application speed with a one-engine failure (VB > V1).
The first-segment speed schedules are interrelated and expressed in terms of the ratios of Vstall, as given in Table 13.4. The velocity ratios in Table 13.4 comprise a typical range and can deviate a little as long as there is compliance with the FAR stipulation (marked with an asterisk in the table). Table 13.5 provides details of the climb segments.
13.4 Derivation of Pertinent Aircraft Performance Equations |
427 |
|||
Table 13.4. Civil aircraft takeoff-speed schedule |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Two-engine |
Three-engine |
Four-engine |
|
|
|
|
|
|
Percent loss at an engine failure |
50 |
33.3 |
25 |
|
Minimum climb gradient at 1st segment |
0% |
0.3% |
0.5% |
|
Minimum climb gradient at 2nd segment |
2.4% |
2.7% |
3% |
|
VLO/Vstall (approximate) |
1.12 to 1.14 |
1.15 to 1.16 |
1.17 to 1.18 |
|
Vstall/VR (approximate) |
1.10 to 1.18 |
1.14 to 1.18 |
1.16 to 1.18 |
|
Vmu/VR (approximate) |
1.02 to 1.04 |
1.02 to 1.04 |
1.02 to 1.04 |
|
V1/VR (approximate) |
0.96 to 0.98 |
0.93 to 0.95 |
0.90 to 0.92 |
|
Vmc/V1 (approximate) |
0.94 to 0.98 |
0.94 to 0.98 |
0.94 to 0.98 |
|
V2/Vstall |
≥1.2 |
≥1.2 |
≥1.2 |
|
FAR requirements
Some engines at the takeoff rating have an APR that could generate a 5% higher thrust than the maximum takeoff thrust for a short period. These types of engines are not considered in this book.
The higher the thrust loading (T/W), the higher is the aircraft acceleration. For smaller changes, VR/Vstall and VLO/Vstall may be linearly decreased with an increase in T/W. The decision speed V1 is established through iterations, as described in Section 13.5.1. In a family of derivative aircraft, the smaller variant can have a V1 close to the VR.
Table 13.5 lists the aircraft configurations and power settings for the climb segments. The firstand second-segment climb schedule has FAR requirements; however, the initial enroute climb capability is a customer requirement, not a FAR requirement.
Military aircraft requirements (i.e., MIL-C5011A) are slightly different than civil aircraft requirements; the first-segment clearing height is 50 ft rather than 35 ft. Many military aircraft have a single engine in which the concept of BFL is not applicable. Military aircraft must satisfy the critical field length (CFL) as described in Section 13.6.1. The second-segment rate of climb must meet a minimum of 500 ft/minute for a multiengine aircraft.
Balanced Field Length: Civil Aircraft
The rated TOFL at the MTOM is determined by the BFL in the event of an engine failure. The BFL must comply with FAR requirements. A normal takeoff with all engines operating needs a considerably shorter field length than the rated TOFL. Designers must provide the decision speed V1 for pilots that below which the takeoff must be aborted for safety reasons if an engine fails. Figure 13.9 shows the segments involved in computing the BFL.
Table 13.5. Civil aircraft firstand second-segment climb configuration
Climb schedule |
Altitude |
Undercarriage |
Flaps/Slats |
Throttle setting (rating) |
|
|
|
|
|
First-segment climb (FAR) |
Clear 35 ft |
Extended |
Extended |
Maximum takeoff |
Second-segment climb (FAR) |
At ≈ 400 ft |
Retracted |
Extended |
Maximum takeoff |
Enroute climb |
At ≈ 1,000 ft |
Retracted |
Retracted |
Maximum climb |
428 |
Aircraft Performance |
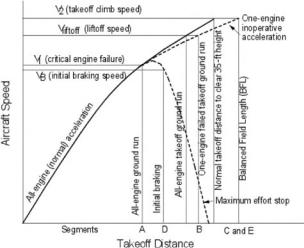
Figure 13.9. Balanced field length consideration
The figure shows that taking off with one engine inoperative (i.e., failed) has three segments to clear a 35-ft height, as follows:
Segment A: Distance covered by all-engine operating ground run until one engine fails at the decision speed V1.
Segment B: Distance covered by one-engine inoperative acceleration from V1 to VLO.
Segment C: Continue with the flare distance from liftoff speed VLO to clear a 35-ft obstacle height reaching aircraft speed V2.
For stopping at the decision speed V1, there are two segments (which replace segments B and C), as follows:
Segment D: Distance covered during the reaction time for a pilot to take braking action. (Typically, 3 s is used as the pilot recognition time and braking to act, spoiler deployment, and so on. At engine failure, the thrust decay is gradual; within this reaction time before brake application, there is a minor speed gain, shown in Figure 13.9.)
Segment E: Distance to stop from VB to V0 (maximum brake effort).
The BFL is established when Segments (B + C) = Segments (D + E).
Takeoff Equations
During takeoff, the aircraft accelerates. At the conceptual design phase, the average values of speed, acceleration, and thrust are taken of 0.7 of the velocity of the ground run segments. In later stages of a project, the computation is figured more accurately in smaller steps of speed increments within which average values of the variables are considered constant. CL also varies with speed changes; typical values of CL and CD/CL are given in Section 13.5.1.