

Теоретическая механика-наука о мех.движ. И взаимодействии тел.Мех.движ-происходящее с теч.времени изменение взаиморасп.тел в пространстве.Мех.взаимодействие -взаимодейств.,приводящее к изменению движения/формы тела.Система отсчета-система координат,жестко связ с телом.Тело-расстояние между 2 его точками в рассматриемом движ.явл конст.Разделы механики:статика-общее учение о силах и послед.усл.равновесия тел,находящихся под действ.сил,кинематика-изучает общие геом.св-ва движ.тел,без учета вызвавших их сил,динамика-движ.тел под действ.сил.Сила-мера механического взаимодействия одних тел на другие, характеризуется величиной, направлением действия и точкой приложения. Аксиома-1: Мат. точка находиться в покое или соверш. равномерное прям. движение, если на неё действ. уравновеш. система сил. Аксиома-2: 2 силы являются уравновеш. системой, тогд, когда они направлены в противоположные стороны по общей линии действия.(силу можно перемещать по линии действ. -с1) Аксиома-3:Если к системе сил, действ. на тв. тело, присоединить или от нее отбросить уравн. систему сил, то получиться система сил, эквивалентная исходной Аксиома-4:Равнодействующая двух сил, пересекающихся в одной точке, изображается диагональю параллелограмма, построенного на этих силах(Теорема о равновесии 3 непараллельных сил. Если абс. тв. тело нах-ся в равновесии по действием 3 непарал. сил, располож. в одной плоскости,то линии действия этих сил пересекаются в одной точке ) Аксиома-5: 2 тела действуют друг на друга с силами, равными по величине и по одной линии действия, но в противоположные стороны.(внутр.тела-уравновеш) Аксиома-6: Равновесие деформ-го тела сохраняется,если в задачах статики его принять абсолютно твёрдым.
Свободное тело – свобода движения, которого в пространстве ничем не ограничена. Уравновешенные силы – система сил, приложенная к тв. телу, не изменяют его кинемат. состояния Сходящиеся силы: линии их действия проходят через одну точку.
Связь – тело, ограничивающее свободу перемещения несвободного тела, сила с которой эти тела действуют-реакции связей. (типы6гладкая поверхность,нить,подшипник,шарнирно-подвижная опора,сферический шарнир)
Момент силы относительно точки – вектор, произведение силы на длину перпендикуляра, опущенного из центра на линию действ. силы M0(F)= +\-Fh .направление-по правилу буравчика от F к O.h-плечо-расст. От т.О до линии действия силы.Момент перпенд. Плоскости,проходящей через о и силу, характеризует усилие с которым эта сила пыталась бы повернуть тело отн.О
Пара сил – система из 2 сил, равных по модулю, и противоположно направлены по парал. линиям действия Момент пары сил-механический эффект от действия пары сил(сумма моментов отн.О). Плоскость действия-плоскость, в которой лежат силы, составляющие пару.Не зависит от выбора центра(OO1+O1A1=OA1 ,OO1+O1A2=OA2 ,m0=mo(F1)+moF2=OA1*F1+OA2*F2=(OO1+O1A1)*F1+(OO1+OA2)*F2=OO1*F1+O1A1*F1+OO1*F2+O1A2*F2=m01*F1+m02*F2+OO1*(F1+F2 =0)=m01*F1+m02*F2=m0),явл.свободным вектором,равен моменту одной из сил пары отн.т. Приложения другой силы,перпенд.плоскости действия пары
Теорема об эквивалентности пар сил: пары сил, лежащих в одной плоскости эквивалентны, если их алгебраические моменты равны.
Теорема сложения пар сил: при сложении 2 пар, действующих на тв. тело момент результирующей пары = геометрической сумме моментов состав. пар. M=M1+M2
Чтобы тело, на которое действует система пар сил, находилось в равновесии, необходимо равенство нулю результирующей пары: M=0
т.о параллельном переносе сил-силу,прилож к телу можно не измен.ее действие на тело паралелльно переложить в любую точку тела доб.при этом пару с моментом=моменту исходной силы отн.точки,в которую сила переносится
Приведение системы сил к центру пусть [F1...Fn]-произв.сист сил ,О-произв.центр.Fi'-сила получ.переносом Fi в О,тогда по т.о пар.пер.сил. [F1'...Fn]~{{F1;mo(F1)},...{Fn';mo{Fn}}~{F1'...Fn'},{mp(F1?mo(Fn))}~{R,m} R-сила,равная сумме Fi=∑Fi-главный вектор сист.сил ,прилож вО.,мо-пара сил с моментом ∑ мо(Fi)-глав.момент системы отн.О.
Произв.сист.сил при приведении к произв.центру О заменяется одной силой ,равной главному вектору системы и прилож.в центре О и одной паре с моментом ,равном главному мменту сист. отн О
Критерии равновесия произвольной системы сил.-явл.уравновеш.,когда при приведении к какому-либо центру ее глав.вектор и глав момент равны нулю.∑Fi=o ∑moFi=o= по осям тоже все рано нулю.
Плоская система сил.-линии действ.сил лежат в одной плоскости.суммы сил-в плоскости,моменты-перпендикулярны плоскости.Алгебр.момент силы отн О-проекция момента отн О на ось перпендикуляра.По часовой минус,против +.Критерий равновесия:ее главн.вектор и главн.алгебр.момент ранвы нулю. ∑Fi(x,y,z)=0 ∑x=o ∑y=o ∑m0=0
Центр тяжести.
Т.
о моменте равнодейств.(Вариньона)Если
система сил, приложенных к абсолютно
твердому телу имеет равнодействующую,
то момент равнодействующей относительно
произвольного центра (оси) равен сумме
моментов всех сил системы относительно
того же цен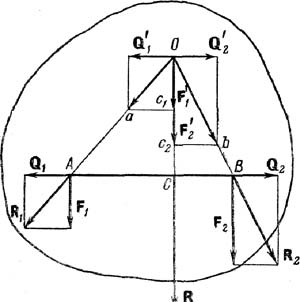 тра
(оси).
тра
(оси).
Система параллельных сил . Если ф1+ф2 не равно 0,то имеют равнодейств.Пусть параллельные силы ф1 и ф 2 имеют сумму не равн.0 приложены в а1 и b. Равнодействующая ф этой системы параллельна каждой из сил ф1 и ф2.смещая,если нужно точку приложения силы ф вдоль линия действия этой силы будем считать,что ф приложена в o(c) лежащей на q'1q'2(a1a2).По т вариньона mc(F)=Mc(F1)+mc(F2)
mc(F1)=-F1h1=-F1A1Ccosa , mc(F2)=F2h2=F2A2Ccosa
0=-F1(A1C1)cosa+F2(A2C)cosa
F1(A1C)=F2(A2C)-> A1C/A2C=F2/F1
В ывод:точка
приложения равнодейств. Делит А1А2 в
отношении,обратном отношению сил.При
поворотах сил-равнод.поворачивается
на тот же угол.Координаты С :
ывод:точка
приложения равнодейств. Делит А1А2 в
отношении,обратном отношению сил.При
поворотах сил-равнод.поворачивается
на тот же угол.Координаты С :![]()
![]()
![]()
Центр тяжести-центр сист.всех сил тяжести,действ.на все частицы тела,находящиеся в поле действия сил тяжести.Система масс m1...mn в точке A 1....An A1(xi,yi,zi)=> Fi=mig
C(xc,yc,zc)-центр тяжести.xc= ∑Fi*xi/ ∑Fi= ∑migxi/ ∑mig= ∑mixi/ ∑mi
Cвойства центра тяжести:1)если сист.масс имеет центр симметрии,то ее центр тяжести лежит в этой плоскости(на оси,в этой точке)2)Т.о группирвке масс .Если система масс S разбита на подсистемы S1...Sn имеющие массы M1...mn и центры масс C1...Cn ,то центры масс системы S совпадает с центром системы точечных масс М1....Мн расп в С1....Сн..Центры масс фигур:у треуголника на медианах.у параллелограмма на пересеч.диагоналей.Кинематика точки — раздел кинематики, изучающий математическое описание движения материальных точек. Основной задачей кинематики является описание движения при помощи математического аппарата без выяснения причин, вызывающих это движение.
Движение любого объекта в кинематике изучают по отношению к некоторой системе отсчета, включающей:
-
Тело отсчета;
-
Систему измерения положения тела в пространстве (систему координат);
Прибор для измерения времени (Часы).Материальная точка — тело, размерами которого по сравнению с характерными расстояниями данной задачи можно пренебречь. Радиус-вектор — Вектор, определяющий положение М. Т. в пространстве. Траектория — воображаемая линия, описываемая концом радиус-вектора в процессе движения. Иными словами, траектория — это линия вдоль которой движется М. Т. Длину участка траектории между начальным и конечным моментами времени часто называют пройденным расстоянием, длиной пути или путем и обозначают буквой S. Законы движения в этом случае записывается в виде S = S(t) и аналогичны соответствующим законам для координат. Например закон равноускоренного криволинейного движения может быть записан в виде:
S=S0+Vt+at2\2, Где : V — модуль начальной скорости, а — Тангенциальное ускорение.
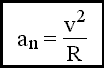
Ускорение - вторая производная радиуса-вектора по времени. Производную по времени от какой-либо величины называют скоростью изменения этой величины. Ускорение - это скорость изменения скорости. Нормальное ускорение направлено по нормали к скорости, его модуль:
Вектор ускорения характеризует быстроту и направление изменения скорости материальной точки относительно тела отсчета.
Скорость и ускорение
Скорость материальной точки представляет собой вектор, характеризующий направление и быстроту перемещения материальной точки относительно тела отсчета. Скорость - это производная радиуса - вектора по времени.
![]() либо,
применяя другое обозначение производной
по времени,
либо,
применяя другое обозначение производной
по времени,
![]()
Ускорение - вторая производная радиуса-вектора по времени. Производную по времени от какой-либо величины называют скоростью изменения этой величины. Ускорение - это скорость изменения скорости. Нормальное ускорение направлено по нормали к скорости, его модуль:
Вектор ускорения характеризует быстроту и направление изменения скорости материальной точки относительно тела отсчета.
2) Равномерное и равнопеременное движение
Криволинейное
движение называется равномерным ⇔
![]() = const
= const
Криволинейное
движение называется равнопеременным
⇔
![]() = const
= const
Если
знак
![]() совпадает со знаком скорости, то движение
равноускоренное
совпадает со знаком скорости, то движение
равноускоренное
Равномерное движение ⇒ V = S = const ⇒ S = ʃ Vdt = Vt + So
Равнопеременное
движение ⇒
![]() = V
= const
⇒
V
= ʃ
= V
= const
⇒
V
= ʃ
![]() dt
=
dt
=
![]() t
+ Vo
t
+ Vo
S
= ʃVdt = ʃ(![]() t
+ Vo)dt =
t
+ Vo)dt =
![]() t^2 / 2 + Vo t + So – уравнение
равнопеременного движения
t^2 / 2 + Vo t + So – уравнение
равнопеременного движения
Сложным
движением точки называется
такое ее движение, при котором она
движется относительно системы отсчета,
перемещающейся по отношению к некоторой
другой системе отсчета, принятой за неподвижную.
Движение точки по отношению к подвижной
системе координат называется относительным
движением точки.
Скорость и ускорение этого движения
называют относительной
скоростью и относительным
ускорением и
обозначают ![]() и
и ![]() .Движение
точки, обусловленное движением подвижной
системы координат, называется переносным
движением точки.
Переносной
скоростью и переносным
ускорением точки называют
скорость и ускорение той, жестко связанной
с подвижной системой координат
точки, с которой совпадает в данный
момент времени движущаяся точка, и
обозначают
.Движение
точки, обусловленное движением подвижной
системы координат, называется переносным
движением точки.
Переносной
скоростью и переносным
ускорением точки называют
скорость и ускорение той, жестко связанной
с подвижной системой координат
точки, с которой совпадает в данный
момент времени движущаяся точка, и
обозначают ![]() и
и ![]() .Движение
точки по отношению к неподвижной системе
координат называется абсолютнымили сложным.
Скорость и ускорение точки в этом
движении
называют абсолютной скоростью и абсолютным ускорением и
обозначают
.Движение
точки по отношению к неподвижной системе
координат называется абсолютнымили сложным.
Скорость и ускорение точки в этом
движении
называют абсолютной скоростью и абсолютным ускорением и
обозначают ![]() и
и ![]() .
.
Вращательным
движением
называется движение, при котором все
точки тела описывают окружности. Центры
этих окружностей лежат на прямой,
называемой осью вращения. В общем случае
движение твердого тела можно представить
как результат сложения поступательного
и вращательного движений. При вращательном
движении все точки тела описывают
окружности, при этом радиус-векторы
поворачиваются на угол
![]() за
время
за
время
![]() .
Для того, чтобы указать, в какую сторону
совершается поворот, элементарные
повороты изображают в виде вектора
.
Для того, чтобы указать, в какую сторону
совершается поворот, элементарные
повороты изображают в виде вектора
![]() .
По модулю
.
По модулю
![]() равен
величине угла поворота, а направление
подчиняется правилу правого винта (рис.
1.6). Быстроту вращения характеризует
угловая скорость
равен
величине угла поворота, а направление
подчиняется правилу правого винта (рис.
1.6). Быстроту вращения характеризует
угловая скорость
![]() .
.
Угловой скоростью называется производная от угла поворота по времени. Модуль угловой скорости равен
![]()
Угловым ускорением называется производная от угловой скорости по времени. Модуль углового ускорения равен
![]()
При
вращении тела вокруг неподвижной оси
угловое ускорение
![]() также
как и угловая скорость
также
как и угловая скорость
![]() направлено
вдоль оси вращения. При ускоренном
движении эти вектора сонаправлены
направлено
вдоль оси вращения. При ускоренном
движении эти вектора сонаправлены
![]() ,
при замедленном - противоположны
,
при замедленном - противоположны
![]() Угловое
ускорение измеряется в рад/с2.
При равномерном вращении
Угловое
ускорение измеряется в рад/с2.
При равномерном вращении ![]()
.
При равнопеременном вращении
![]() где
где
![]() - начальная угловая скорость.
Знак "+" - при равноускоренном
движении.
Знак
"-" - при равнозамедленном движении.
- начальная угловая скорость.
Знак "+" - при равноускоренном
движении.
Знак
"-" - при равнозамедленном движении.
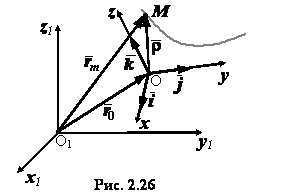
скорость точки при сложном движении.
Пусть
имеется неподвижная система
отсчета ![]() по отношению к
которой движется подвижная система
отсчета
по отношению к
которой движется подвижная система
отсчета ![]() . Относительно
подвижной системы координат движется
точка
. Относительно
подвижной системы координат движется
точка ![]() . Уравнение
движения точки
. Уравнение
движения точки ![]() можно задать векторным способом
можно задать векторным способом![]() ,где
,где ![]() -
радиус-вектор точки
-
радиус-вектор точки ![]() ,
отн. неподвиж. Сист.
,
отн. неподвиж. Сист. ![]() ;
; ![]() - радиус-вектор
подвиж. Сист. координат
- радиус-вектор
подвиж. Сист. координат ![]() ;
; ![]() - радиус-вектор
рассматриваемой точки
- радиус-вектор
рассматриваемой точки ![]() ,
относ. Подвиж. Сист. координат.Пусть
,
относ. Подвиж. Сист. координат.Пусть ![]() координаты
точки
координаты
точки ![]() в
подвижных осях. Тогда
в
подвижных осях. Тогда![]() ,
,![]() .
.
Дифференцируя
равенство получим относительную
скорость: ![]() ,
,![]() ,
, ![]() ,
, ![]() выражение
для переносной скорости дифференцируя
по времени радиус-вектор
выражение
для переносной скорости дифференцируя
по времени радиус-вектор ![]() ,
:
,
:![]() .Выражение
для абсолютной скорости найдем,
дифференцируя по времени
.Выражение
для абсолютной скорости найдем,
дифференцируя по времени ![]() ,
,![]() .
.
![]() . теорема
о сложении скоростей: абсолютная
скорость точки равна геометрической
сумме переносной и относительной
скоростей.Теорема о
сложении ускорений
(теорема Кориолиса).
. теорема
о сложении скоростей: абсолютная
скорость точки равна геометрической
сумме переносной и относительной
скоростей.Теорема о
сложении ускорений
(теорема Кориолиса).
При непоступательном переносном движении абсолютное ускорение точки находится как сумма трех ускорений: относительного, переносного и кориолисоваускорений.
![]() ,
, ![]() ,
,
где ![]() −
угловая скорость переносного вращения.
−
угловая скорость переносного вращения.
(Далее ![]() )
)
![]()
![]()
Применяя формулу Бура для производной вектора ![]() получаем
получаем ![]()
![]()
![]()
![]()
![]()
Выделяем в этом выражении переносное ускорение ![]()
![]()
Окончательно имеем ![]()
Динамика материальной точки
Точка, движение которой ничем не ограничено, называется свободной. Свободная точка под действием приложенных сил может двигаться в каком угодно направлении. Задачи, в которых рассматривается свободная точка, решаются при помощи основного уравнения динамики (жирным -вектор) (а)P = ma.Если на точку действует только одна сила Р , то векторное ур. (а) заменяется скалярным уравнением (б)P=ma, выражающим зависимость между модулями силы и ускорения,m-мера инертности тела,F-мера мех.взаимодейств.тел завис. От t,x,y,z,x',y',z'
Если на точку действует несколько сил Р1, Р2, ..., Рn, то векторное уравнение (а) примет вид (в)R=ma, где равнодействующая R=∑Pi и, согласно закону независимости действия сил, a=∑ai(ускорение точки равно геометрической сумме ускорений, сообщенных ей каждой силой в отдельности).Векторное равенство (в) заменяется двумя или тремя скалярными равенствами.Если силы Р1, Р2, ..., Рn, действующие в одной плоскости, спроектировать на две взаимно перпендикулярные оси, получим два скалярных уравнения (уравнения проекций на оси х и у): (г)∑Xi=max, ∑Yi=may, где ax и ay – проекции ускорения а соответственно на ось x и y.
Основные
(общие) теоремы динамики систем свободных
материальных точек являются уравнениями
движения систем свободных материальных
точек, т. е. математически дифференциальными
уравнениями изменений основных мер
движения.1. Для
точки ![]() уравнение
движения отн. Инерц. Сист. отсчёта:
уравнение
движения отн. Инерц. Сист. отсчёта:
Перенесём
все векторы, не изменяя их направления,
в центр масс и сложим геометрически:
![]() .
.
Производная по времени от количества движения системы свободных материальных точек равна геометрической сумме внешних сил. Это теорема об изменении количества движения системы.
Так
как ![]() то
то![]() .Это
уравнение движения центра масс системы
материальных точек с массой, равной
массе всей системы, к которой приложена
сумма всех внешних сил (главный вектор
внешних сил ) или
теорема о движении центра масс.2. Умножим
уравнение движения точки
.Это
уравнение движения центра масс системы
материальных точек с массой, равной
массе всей системы, к которой приложена
сумма всех внешних сил (главный вектор
внешних сил ) или
теорема о движении центра масс.2. Умножим
уравнение движения точки ![]() слева
векторно на
слева
векторно на ![]() и
геометрически сложим, перенося векторы
в центр масс:
и
геометрически сложим, перенося векторы
в центр масс:
![]() .
.
Теорема
об изменении кинетического момента
системы:Производная
по времени от кинетического момента
системы свободных материальных точек
равна сумме моментов всех внешних сил
(главному моменту всех внешних
сил).Существенно:
моменты количества движения и моменты
сил вычисляются относительно общего
неподвижного начала.3. Умножая
скалярно уравнение движения точки ![]() на
на ![]() и
суммируя: Теорема об изменении кинетической
энергии системы:
и
суммируя: Теорема об изменении кинетической
энергии системы:
![]()
Дифференциал кинетической энергии системы свободных материальных точек равен сумме элементарных работ всех внешних и внутренних сил.
Интегралы
уравнений движения системы:1)
Если равен нулю главный вектор внешних
сил, то ![]() =
const, то есть центр масс системы свободных
материальных точек движется равномерно
и прямолинейно.2) Если главный момент
внешних сил равен нулю, то сохраняется
кинетический момент системы свободных
материальных точек:
=
const, то есть центр масс системы свободных
материальных точек движется равномерно
и прямолинейно.2) Если главный момент
внешних сил равен нулю, то сохраняется
кинетический момент системы свободных
материальных точек: .3)
Если внешние и внутренние силы
консервативны, тоЗдесь:
.3)
Если внешние и внутренние силы
консервативны, тоЗдесь:![]() -
потенциал внешнего силового поля;
-
потенциал внешнего силового поля;![]() -
потенциал взаимодействия точек;
-
потенциал взаимодействия точек;![]() -
потенциальная энергия системы точек
во внешнем поле;
-
потенциальная энергия системы точек
во внешнем поле;![]() -
потенциальная энергия взаимодействующих
точек.
-
потенциальная энергия взаимодействующих
точек.
При
плоском движении твердого тела, если
его угловая скорость ≠ 0, в каждый момент
времени есть точка, связанная с плоской
фигурой, скорость которой в этот момент
времени =0. Эта точка наз-ся мгновенным
центром скоростей.
Если известно положение МЦС тела и
скорость какой-либо его точки, то угловая
скорость тела определяется как отношение
скорости точки к расстоянию от этой
точки до МЦС.
![]()
Т-ма
о проекциях скоростей двух точек тела:
проекции скоростей двух точек твердого
тела на ось, проходящую через эти точки,
равны друг другу. Рассмотрим две точки
А и В плоской фигуры. Принимая точку А
за полюс, получаем .![]() Отсюда, проектируя обе части равенства
на ось, направленную по АВ, и учитывая,
что вектор перпендикулярен АВ, находим
Отсюда, проектируя обе части равенства
на ось, направленную по АВ, и учитывая,
что вектор перпендикулярен АВ, находим
![]() и
теорема доказана.
и
теорема доказана.
Силы внутренние и внешние.Система материальных точек или тел движение или рановесие которой рассматривается, будем называть механической системой. Если между точками или телами механической системы меняются силы взаимодействия, то движение любой точки системы связано с движением остальных точек. Силы действующие на каждую из точек можно разделить на внешние и внутренние.Внешние силы-действующие на точу со стороны тел не входящих в систему.Внутренние-действующие со стороны тел системы. Свойства внутренних сил. Силы действующие на k-ую точку обозначим: (внутр.сила.), (внеш.сила)
А)Главный вектор(геометрическая сумма)всех внутренних сил равен 0.
Б)главный момент сиcтемы внутренних сил относительно любого центра О равен нулю.
Замечание:свойства а и б не означают что внутренние силы уравновешивают друг друга,т.к. они приложены к разным точкам.
Закон сохранения движения центра масс.1) Если , то Если сумма всех внешних сил действующих на систему равно нулю, то центр масс движется равномерно и прямолинейно.2)Если , то Если сумма проекций на какую-нибудь ось равна нулю, то проекция скорости центра масс системы на эту ось константа.
Кинетическая энергия-это .Для каждой точки к ,суммируем по к , где 1-энергия прирощения кинетической энергии, 2-сумма работ внутренних сил, 3-сумма работ внешних сил. Интегрируем по времени.. Закон изменения кинетической энергии. Изменение кинетической энергии системы при некотором ее перемещении равно сумме работ на этом перемещении всех внутренних и внешних сил. В данной теореме внутренние силы исключить не удается.
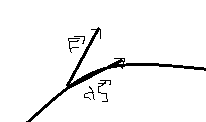
Работа силы. Элементарная работа силы F на элементарном перемещении dэто .Определение-работы силы на конечном перемещении (вдоль пути) равна сумме элементарных работ силы на всех элементарных перемещениях, составляющих этот путь..
 Для
точки проектируем обе части равенства
на ось тау, касательная к траектории.
, но , , или теорема в дифф.форме.-кинетическая
энергия точки, dT=dA
(интегрируем по пути).,1-изменение
кинетической энергии,2-работа силы на
конечном перемещении.
Для
точки проектируем обе части равенства
на ось тау, касательная к траектории.
, но , , или теорема в дифф.форме.-кинетическая
энергия точки, dT=dA
(интегрируем по пути).,1-изменение
кинетической энергии,2-работа силы на
конечном перемещении.