Частные случаи контроля по модулю
Все модули можно разделить на 3 большие группы, отличающиеся аппаратурными затратами на реализацию и характеризуемые сложностью построения схем контроля: класс модулей рm – 1 (3, 7, 15 ...), рm +1 (5, 9, 17, ...) и прочие (6, 10, 11, 13, ...) гдеm- степень основания системы счисления р (ранее было показано, что модули класса рm для числового контроля не используются).
Проведем краткое сравнение данных классов модулей.
Из таблицы для определения весовых функций разрядов видно, что модули класса рm – 1 для одного и того же количества избыточных разрядов для формирования КК имеют минимальный период, а следовательно, требуют меньших аппаратурных затрат для числового контроля. Прочие модули имеют максимальный период и их можно из дальнейшего рассмотрения исключить.
При цифровом контроле для модулей класса рm +1цифры числа четные и нечетные имеют знакопеременный характер. Поэтому при построении схем сверток сначала необходимо найти суммы четных и нечетных цифр числа, а затем разность между полученными суммами по модулю рm +1. Это также вносит дополнительные аппаратурные затраты на реализацию схемы свертки.
При построении схем сверток необходимо учитывать, что модули класса рm +1в контрольном коде имеются избыточные комбинации (например, для модуляq=5 это комбинации 6 и 7, которые надо отслеживать для получения КК в диапазоне 0q4.
При контроле арифметических операций и построении схем сверток на сумматорах могут возникать единицы переноса из старшего разряда КК суммы. Для учета этого переноса его надо компенсировать: для модулей класса рm 1 путем циклического прибавления единицы переноса из старшего разряда сумматора КК к младшему разряду, а для модулей класса рm +1необходимо прибавлять корректирующее число, определяемое по формуле:
рm+1 (рm-1)mod(рm+1).
Например: р = 2, m= 2, то 233mod5, т.е. для модуля 5 сумматор должен иметь цепь циклического переноса в первый и второй разряды одновременно, что также вносит либо дополнительные аппаратурные затраты, либо дополнительный такт для коррекции суммы КК.
Как будет показано в дальнейшем с увеличением модуля возрастает эффективность обнаружения ошибок различной кратности. Следовательно, модули класса рm-1 с одинаковым числом избыточных разрядов (приблизительно равными аппаратурными затратами на схемы контроля) имеют более высокую эффективность обнаружения ошибок различной кратности.
Для класса модулей рm 1 цифровой и числовой контроль совпадают, так период весовой функции для числового контроля совпадают с разрядностью цифры числа и их весовые функции разрядов.
Вывод: на практике модули класса рm-1нашли наибольшее применение.
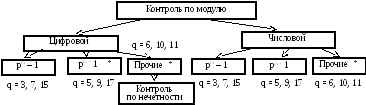
* - на практике не используются.
Способы построения схем сверток
По характеру построения схемы свертки можно разделить на:
схемы с последовательным переносом сигнала образования остатка разряд за разрядом;
пирамидальные (параллельные) схемы свертки;
комбинированные (параллельно-последавательные) схемы свертки, в которых КК цифры (периода весовой функции) образуется параллельно, а КК числа последовательно цифра за цифрой.
Схемы с последовательным переносом и комбинированные на практике применяются редко, так как для образования КК требуется большое время, сильно зависящее от разрядности числа:
tkk=(n- 1) - для последовательных схем свертки, где- время задержки на одном каскаде логических элементов,n- разрядность числа;
tkk=(n/m) - для последовательно параллельных схем сверток, гдеm- количество разрядов в группе (цифре).
Для пирамидальных схем свертки tkk=s, гдеs- количество каскадов в схеме свертки.
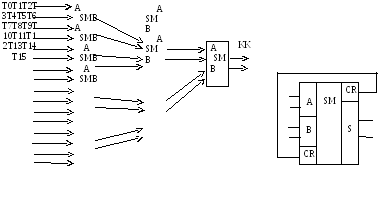
Можно выделить два способа технической реализации схем сверток:
на логических элементах;
на двоичных сумматорах.
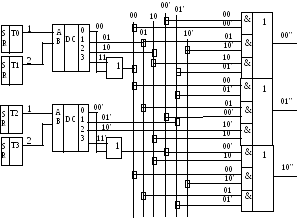
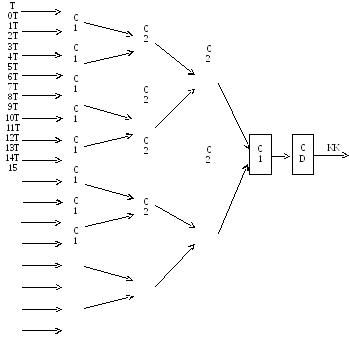
Построим пирамидальную схему свертки по mod3. Так как числовой и цифровой контроль по этому модулю совпадают, то схемы будут идентичны.
В первом каскаде с помощью двоичного дешифратора получен унитарный код цифры числа (периода весовой функции), а на втором каскаде группы схем И-ИЛИ КК двух соседних цифр.
Нахождение остатка сводится к суммированию цифр числа, затем цифр суммы цифр и т.д. до тех пор пока определенная сумма цифр не станет меньше модуля, т.е. получим КК числа.
Структурная схема свертки имеет следующий вид.
Число каскадов и количество групп зависят от модуля контроля. Число каскадов можно уменьшить, увеличивая число разрядов в группе. Ограничения накладываются только числом входов у элементов И-ИЛИ.
Сокращение числа каскадов дает применение сумматоров для построения схем сверток используя свойства класса модулей рm – 1.
Контроль хранения или передачи числа по модулюq. Этот контроль осуществляется по схеме, рассмотренной ранее для контроля по нечетности. Сравнение остатков r (источника) и r* (приемника) дает возможность обнаруживать большинство ошибок по признаку несовпадения H по сравнению с контролем по модулю 2.
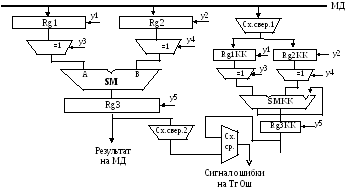
Контроль арифметических операций по модулю q. АЛУ состоит из АЛУ чисел и АЛУ контрольных кодов. Входные операнды последовательно загружаются вRg1 иRg2 АЛУ чисел и параллельно на схеме свертки 1 формируется КК загружаемого операнда и записывается в соответствующий регистр КК.
Алгоритм операции сложения выполняется параллельно в АЛУ чисел и АЛУ КК под управлением одних и тех же сигналов. На схеме свертки 2 после выполнения алгоритма операции формируется КК результата, который сравнивается на Сх.ср. с суммой контрольных кодов, полученной в Rg3KK. При несовпадении контрольных кодов формируется сигнал ошибки, который фиксируется в соответствующем триггере регистра ошибок.
Схему свертки 2 можно исключить из схемы, а использовать схему свертки 1, принимая данные на ее вход либо через мультиплексор, либо использовать Rg3 с отключаемыми выходами.
Рассмотрим далее возможности контроля по модулю в смысле количества обнаруживаемых ошибок, т. е. попытаемся определить степень полноты контроля по модулю.