

4. Формирование матриц жесткости и масс в глобальной системе координат для рамы
Узловые
перемещения рамного конечного элемента
в локальной системе координат
 выражаются через глобальные узловые
обобщенны перемещения
выражаются через глобальные узловые
обобщенны перемещения и углы α и β рис.4.1 в виде
и углы α и β рис.4.1 в виде







Рис. 4.1. Преобразование на плоскости узловых перемещений рамного конечного элемента
В матричной форме это преобразование запишем так

где
 (4.2)
(4.2)
Направляющие
косинусы локальной оси
 определяются глобальными координатами
узлов
определяются глобальными координатами
узлов
 (4.3)
(4.3)
 (4.4)
(4.4)
где
 (4.5)
(4.5)
длина элемента.
Матрица жесткости конечного элемента в глобальной системе координат преобразуется с учетом выражения (4.1) и зависимости для потенциальной энергии элемента, которая не зависит от выбора системы отсчета:

тогда
 (4.6)
(4.6)
Аналогично
преобразуется и матрица масс конечного
элемента
 ,
на основании того, что кинетическая
энергия элемента не зависит от направления
осей координат, по аналогии с потенциальной
энергией получим:
,
на основании того, что кинетическая
энергия элемента не зависит от направления
осей координат, по аналогии с потенциальной
энергией получим:
 (4.7)
(4.7)
Узловые силы и моменты, приложены к узлам рамы, которые задаются в глобальной системе координат, в преобразованиях не нуждаются.
Силы, заданные в локальной системе отсчета для каждого элемента должны быть приведены к глобальной системе отсчета. Распределенные нагрузки приведенные к узловым силам в локальной системе координат совершают возможную работу на глобальных возможных перемещениях
 ,
,
где узловые силы в локальной системе отсчета равны

Выразим глобальные перемещения через локальные по уравнениям (4.1):
 ,
,
учитывая

 ,
,
или
 ,
,
тогда
 ,
,
Коэффициенты
в выражении возможной работы при
вариациях обобщенных координат
 есть вклад в обобщенные силы от
распределенных внешних нагрузок
есть вклад в обобщенные силы от
распределенных внешних нагрузок
 (4.8)
(4.8)
Добавляя в выражение (4.8) вклад сил заданных в глобальной системе отсчета и объединяя уравнения равновесия для всей совокупности конечных элементов, получим уравнения равновесия системы при статической задаче:
 (4.9)
(4.9)
И уравнения динамического равновесия для движения всей конструкции:
 (4.10)
(4.10)
Рассмотрим,
как формируется матрица жесткости и
уравнения равновесия для механической
системы, содержащей рамные конечные
элементы (рис. 4.2), к которой приложены
распределенные силы интенсивности
p=400 Н/м
и сосредоточенные силаF=700
Н и моментM=200 Н м.
Известны размеры
м.
Известны размеры Без
учета закрепления узлов необходимо
ввести 24 обобщенных перемещений (по три
на каждый из 8 узлов). Матрица жесткости
для такой системы будет иметь размер
24
Без
учета закрепления узлов необходимо
ввести 24 обобщенных перемещений (по три
на каждый из 8 узлов). Матрица жесткости
для такой системы будет иметь размер
24 24,
а матрица каждого элемента, приведенная
к глобальной системе координат, имеет
размер
24,
а матрица каждого элемента, приведенная
к глобальной системе координат, имеет
размер Таким образом, конечные элементы, узлы
которых совпадают должны вносить общий
суммарный вклад в соответствующие
элементы матрицы жесткости, причем
шарнирно-соединенные элементы получают
в точке соединения разные глобальные
номера узлов. Это обусловлено тем, что
углы поворота таких узлов разные.
Таким образом, конечные элементы, узлы
которых совпадают должны вносить общий
суммарный вклад в соответствующие
элементы матрицы жесткости, причем
шарнирно-соединенные элементы получают
в точке соединения разные глобальные
номера узлов. Это обусловлено тем, что
углы поворота таких узлов разные.
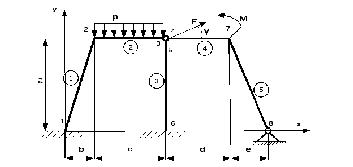
Рис. 4.2 Рама с номерами узлов: 1...8 и номерами стержней 1...5 (в окружностях)

Рис. 4.3 Нумерация глобальных обобщенных координат для трех первых элементов с указанием в скобках номеров внутренней нумерации
В качестве исходных данных для формирования матрицы жесткости потребуется координатная матрица для узлов и топологическая матрица для конечных элементов. Координатная матрица – это таблица, которая содержит информацию о номере узла и его координатах, а также о способе его закрепления и приложенных сосредоточенных силовых воздействиях. В соответствии с количеством узлов выбирается число обобщенных перемещений.
Для
конструкции рисунка 4.2 с учетом размеров координатная матрица имеет вид таблицы
4.1.
координатная матрица имеет вид таблицы
4.1.
Таблица 4.1