

10. Динамика автоматизированных эп птм. Определение необходимости регулирования пускового момента
При повторно- кратковременном режиме, особенно с большим числом вкл. в час производительность ПТМ в значительной степени зависит от времени перех. процесса. поскольку макс. Ускорение ограничено (a=aдоп), то оптимальными будут переходные процессы при адоп.
Наиб. сильное возмущение, влияющее на ускорение, - МсиJ. Из уравнения динамики пуск. моменты при наличии возмущения без изменений в пределах:

Дле реализации таких оптимальных п/п (a=aдоп) необходимо, чтобы Мпускавтоматически при изм. возмущения от Мпminдо Мпmax. Такими свойствами обладают регулируемые ЭП с обратными связями (в частности, по ускор.). реализация на практике таких ЭП для ПТМ затруднительна, поэтому стремятся использовать простые ЭП, учитываяЕдоп–maxдопуст.
Условия когда можно ипользовать перерегулирование по Мпуск ЭП:

Простейшая хар-ка – АД к/з (Sк=1)
![]()
Mп доп=Мс min+JminEдоп
При остальных нагрузках ускор. <Едоп
Мин. ускор. –

Возможны случаи:
1. Мдинд>>2МсЕmin Едоп
Ускорение при работе мех-ма изменяется в незначительных пределах, и maxпроизводительность мех-ма обеспечивается при использовании простейших систем ЭП с нерегулируемым Мпуск.
2. Мдинд>2Мс
Ускорение изменяется в широких пределах, при этом значительное снижение ускорения при больших нагрузках может недопустимо снижать производительность механизма. Если при Мдинд=2Мс амин=0, то осуществить пуск приmaxнагрузке с независящим от нагрузки Мпуск д– невозможно.
3. Мдинд2Мс
Обеспечивает ограничение ускорений можно только путем использования систем ЭП, которые развивают в переходных процессах при разных статических нагрузках различные Мпуск и Мторм. В этом случае ускорение при наложеном тормозе обязательно превысит допустимоеamax>aдоп, обеспечить ограничение ускорения в этом режиме можно путем использования системы непрерывного выравнивания без наложения тормоза, либо с наложением тормоза после окончания процесса точной остановки.
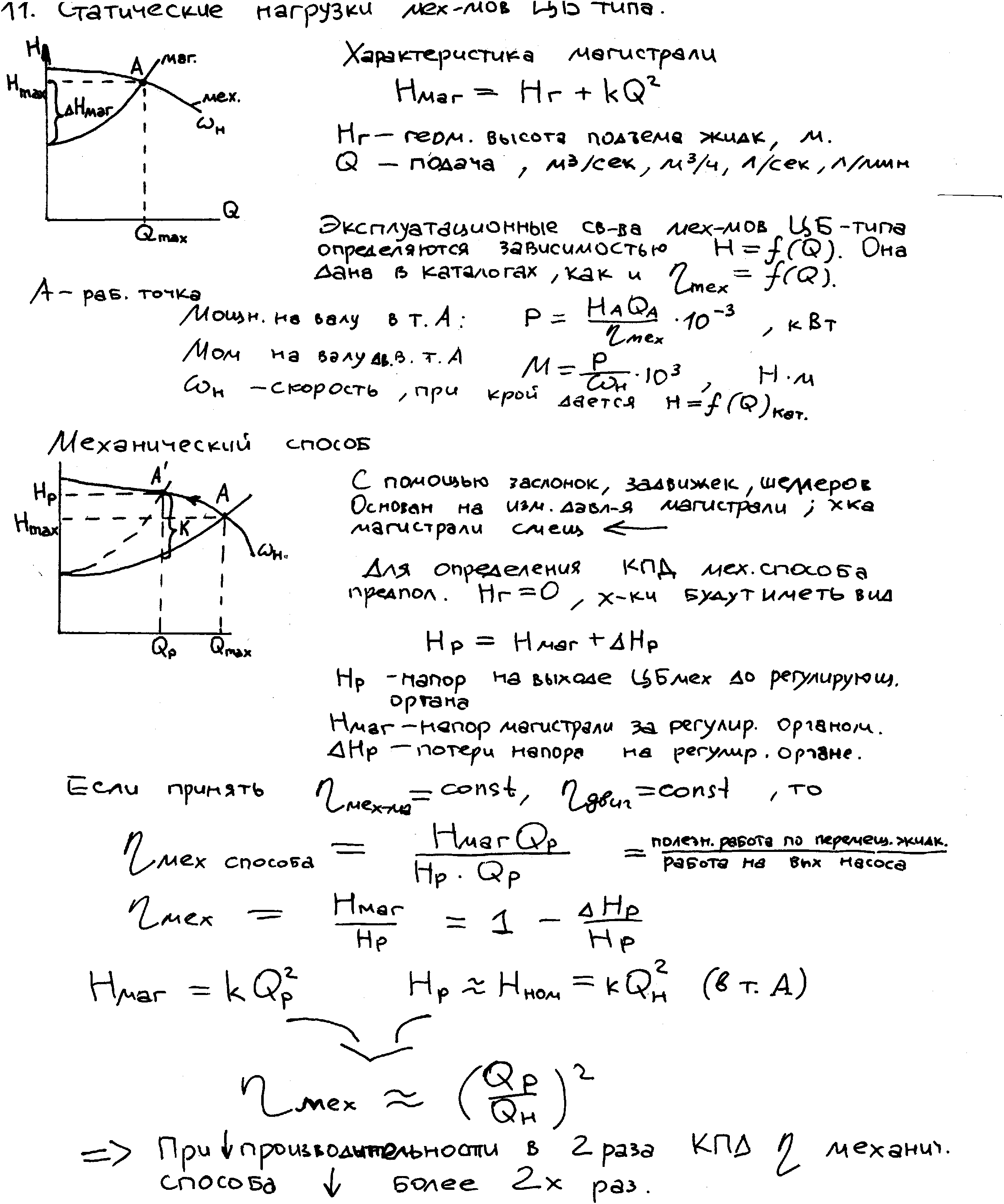
11.Статические нагрузки механизмов цбт. Механический способ регулирования производительности
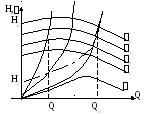
12 Электрический способ регулирования производительности механизмов центробежного типа.
Этот способ является экономичным и обеспечивает возможности автоматизации процесса регулирования.
Эффект изменения производительности и напора достигается за счет уменьшения скорости вращения вала механизма центробежного типа.

Q
Для расчета характеристик на пониженной скорости применяются законы пропорциональности насоса:
![]()
![]()
![]()
Данные зависимости получены в предположении, что КПД механизма при 1,2остается постоянным.
Постоянство КПД соблюдается, если статический напор Нст=0, это характерно для вентиляторов.

![]()
![]()
Если статический напор
Нст0, т.е.
![]()
(данная зависимость характерна для насосов). При этом КПД в рабочих точках непостоянный.
Нст0
Для пересчета на пониженную скорость необходимо:
Задаться точками на характеристике со скоростью равной =н.
![]()
Рассчитать параболы для каждой из точек, которые будут являться линиями равного КПД.

Каждой точке параболы соответствует своя скорость механизма:
![]()
![]()
Оглавление
1.Статические нагрузки двухконцевых лебедок 1
2.Методы предварительного выбора типовых ОПМ 2
3.Способы уменьшения механических колебаний 4
4.Выбор зазоров в зубчатых передачах 5
5.Электромеханические колебания резонансного характера 6
6.Схема безопасного спуска для крановых механизмов с ДПТ ПВ 7
7. Требования, предъявляемые к ЭП экскаваторов. ЭП механизма подъема экскаватора с магнитным усилителем 8
8.Оптимальная структура экскаваторного ЭП. Режим К3 10
9.Автоматизация подъемно-транспортных механизмов циклического действия 11
10. Динамика автоматизированных ЭП ПТМ. Определение необходимости регулирования пускового момента 12
11.Статические нагрузки механизмов ЦБТ. Механический способ регулирования производительности 13
12 Электрический способ регулирования производительности механизмов центробежного типа. 14