


16
мя, называемое периодом вращения Т. Если в единицу времени (1 с) совершается ν оборотов, то период Т = 1/ν. Иначе число оборотов в единицу времени ν называют частотой вращения. Угловая скорость при равномерном вращении
t . Угловой путь за один оборот равен 2 радиан, тогда
2 2 .
T
1.1.4.Равномерное движение
Взависимости от того, как изменяются со временем скорость и ускорение материальной точки, ее движение может быть разделено на несколько видов. Простейшим является случай движения с постоянной по модулю ско-
ростью – равномерное движение.
Рассмотрим равномерное движение материальной точки с постоянной по модулю скоростью v const. по произвольной траектории. Из определения
модуля скорости v |
ds |
следует, что элементарный путь ds, который матери- |
|
dt |
|||
|
|
альная точка проходит за время dt, находится как:
ds vdt .
Интегрируя, получим закон зависимости пройденного пути от времени наблюдения t:
s ds vdt s vt C.
Константу интегрирования C определим из начальных условий. Если в начале наблюдения при t = 0 путь материальной точки s s0 , тогда C s0 , а закон зависимости пути от времени наблюдения принимает вид:
s s0 vt.
Если в момент времени t = 0 пройденный путь s0 0 , тогда
s vt .
17
Равномерное движение не означает движения без ускорения, поскольку при криволинейном равномерном движении материальная точка обладает нормальным ускорением an . Равна нулю только тангенциальная компонента ускорения, поскольку скорость не меняется по величине. Для равномерного движения
|
|
|
|
a a |
dv |
. |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
n |
|
dt |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
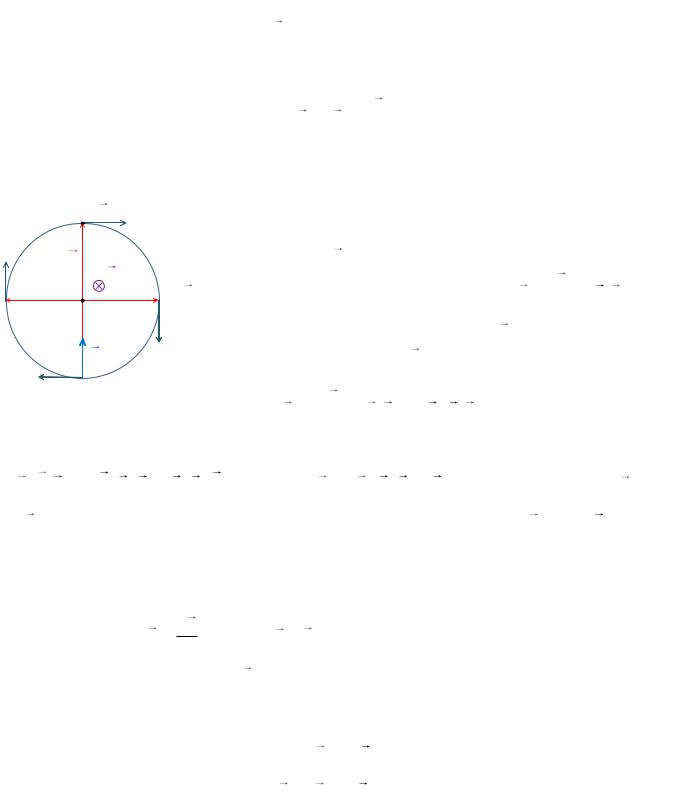
Рассмотрим равномерное |
движение материальной точки по |
||||||||||||
|
|
v |
окружности (рис. 1.10). Расположим начало координат в |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
центре этой окружности. В случае равномерного движе- |
|||||||||||
|
r |
|
ния радиус-вектор r |
прецессирует с угловой скоростью |
||||||||||
|
|
и, |
|
|
|
|
|
|
|
|
v |
dr |
, r . |
|
|
|
|
согласно |
уравнению прецессии, |
||||||||||
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
dt |
|
|
|
|
Вектор скорости материальной точки v также прецес- |
|||||||||||
|
|
an |
сирует с угловой скоростью . Тогда вектор нормально- |
|||||||||||
|
|
|
го ускорения a |
|
dv |
|
,v , r . Применяя свой- |
|||||||
|
|
|
|
|||||||||||
|
Рис. 1.10. |
|
n |
|
dt |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
ство |
двойного |
|
векторного |
|
произведения |
||||||
a b,c |
b a c c a b , получим an r r 2. Так как векторы r |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
и взаимно перпендикулярны, первое слагаемое равно нулю, и an 2r . Пусть материальная точка движется равномерно по прямолинейной
траектории. Тогда вектор мгновенной скорости остается постоянным не только по модулю, но и по направлению. Согласно определению вектора мгно-
венной скорости v drdt . Тогда dr vdt . Интегрируя это выражение, найдѐм
зависимость радиус-вектора r движущейся материальной точки от времени наблюдения:
r dr
r vdt vt C.
Константу интегрирования C определим из начальных условий: если в начале наблюдения при t = 0 положение материальной точки определялось
18
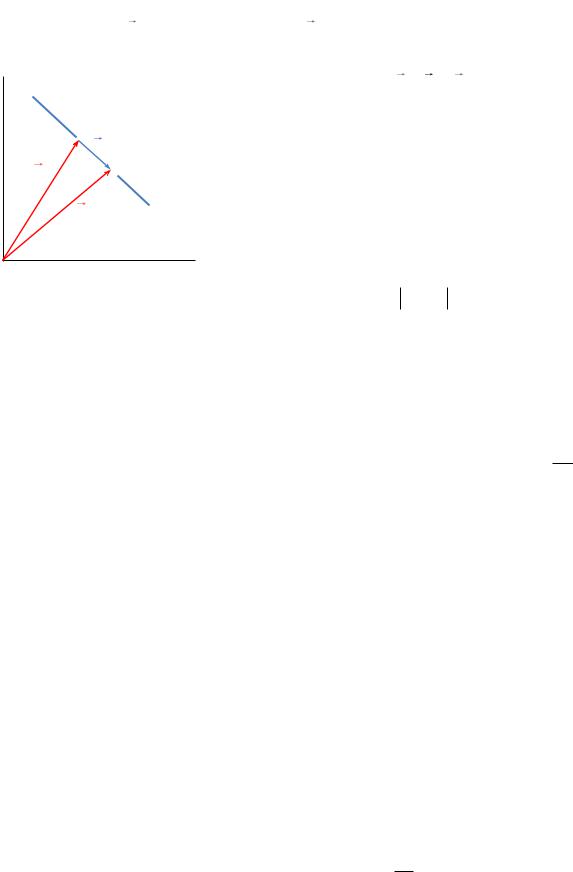
радиус-вектором r0 (рис. 1.11), то C r0 , а зависимость радиус-вектора от времени принимает вид:
y |
|
r r0 vt . |
|
|
|
|
vt |
x x0 vxt |
|||
|
В проекциях на оси координат |
y y |
v t. |
||
|
|
||||
r0 |
|
|
|||
|
|
0 |
y |
||
|
|
|
|
||
r |
Ось x обычно проводят по траектории пря- |
|
молинейного движения, тогда пройденный мате- |
||
|
||
|
риальной точкой путь |
|
|
x |
Рис. 1.11. |
s x x0 |
vt. |
|
1.1.5.Движение с постоянной тангенциальной составляющей
вектора ускорения aτ.
Определим зависимость модуля скорости от времени наблюдения, ис-
пользуя определение тангенциальной составляющей ускорения a ddtv . За
промежуток времени dt изменение модуля скорости dv a dt . Интегрируя, получим:
vdv
va dt a t C.
Константу интегрирования C определим из начальных условий: если в момент начала наблюдения при t = 0 материальная точка обладала скоростью, по модулю равной v0 , тогда C = v0 , а зависимость модуля скорости от времени наблюдения:
v v0 a t . |
(1.2) |
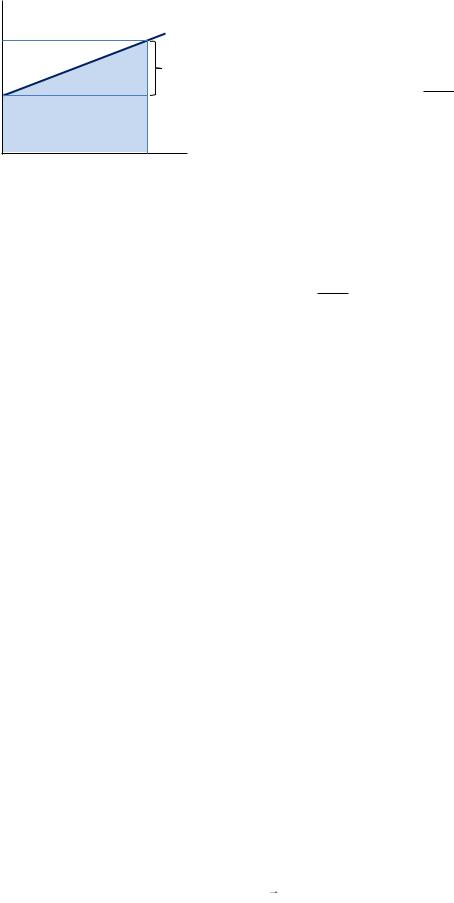
График этой зависимости показан на рисунке 1.12.
Аналогично определим зависимость пройденного пути от времени на-
блюдения. Из определения модуля скорости v dsdt выразим элементарный путь ds vdt . Интегрируя, получим:
|
|
|
19 |
|
|
|
|
|
||
v |
|
|
|
|
|
s ds |
|
|||
v |
B |
|
|
s vdt (v0 a t)dt |
||||||
|
|
|
|
|||||||
|
A |
a t |
|
|
|
s v0t |
a t |
2 |
C. |
|
v |
|
|
|
|
|
|||||
|
C |
|
|
|
2 |
|
||||
0 |
|
|
|
|
|
|
|
|||
|
|
D |
Константу интегрирования определим из на- |
|||||||
O |
t |
t |
||||||||
|
|
|
|
|
|
|
||||
|
чальных условий: если в момент времени t = 0 путь |
|||||||||
|
Рис. 1.12. |
|
s = 0, тогда C = 0, а зависимость пути от времени |
|||||||
|
|
|
|
|
|
|
|
|
||
|
|
|
принимает вид: |
|
|
|
|
|
||
|
|
|
s v0t |
a t2 |
|
|
|
|
||
|
|
|
|
|
. |
|
|
(1.3) |
||
|
|
|
|
2 |
|
|
||||
|
|
|
|
|
|
|
|
|
||
К такому же результату можно прийти, используя график зависимости скорости от времени v v0 a t . Путь, пройденный материальной точкой за время t, соответствует площади под графиком скорости. На рис. 1.12 эта площадь выделена цветом. Видно, что она равна сумме площадей прямоугольника OACD и треугольника АВС. Площадь прямоугольника соответствует v0t ,
|
a t 2 |
. Таким образом, s v0t |
a t2 |
|
|
площадь треугольника |
|
|
. |
||
2 |
2 |
||||
|
|
|
Всю заштрихованную площадь можно также представить как площадь трапеции OABD, равную произведению полусуммы оснований v и v0 на вы-
соту t, тогда |
|
|
|
|
|
|
|
s v v0 . |
(1.4) |
||||
|
|
|
|
2 |
|
|
Из (1.2) выразим время, |
t v v0 |
, и подставим его в (1.4), тогда |
||||
|
|
a |
|
|
|
|
|
v v |
|
v v |
v2 v2 |
||
s |
0 |
|
|
0 |
и s |
0 . |
|
|
|
||||
|
2 |
|
a |
2a |
||
1.1.6. |
Равноускоренное движение |
|||||
Движение называют равноускоренным, если оно происходит с постоянным вектором полного ускорения a const. Если тангенциальная составляю-
20
щая ускорения при этом не остаѐтся постоянной, то формулы для скорости и пути, полученные в предыдущем параграфе, не будут справедливы.
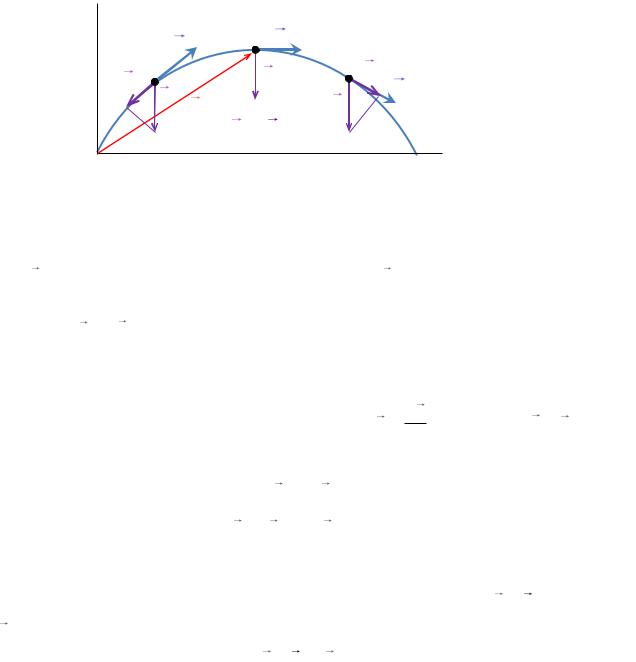
Примером такого движения может служить движение тела в однородном поле тяготения Земли или движение заряженной частицы в однородном электрическом поле плоского конденсатора.
На рисунке 1.13 показана траектория движения камня, брошенного под углом к горизонту в поле тяготения Земли. Выберем оси координат таким образом, чтобы вектор скорости при движении тела лежал в плоскости xy.
y
|
|
v |
B |
v |
|
|
|
|
|
C a v |
|
a |
A |
|
|
a |
|
|
a |
|
r |
|
a |
|
|
|
|
||
|
|
|
a g |
|
|
x
Рис. 1.13.
Во всех точках траектории камень обладает постоянным полным ускорением a , равным ускорению свободного падения g , а нормальная и тангенциальная составляющие полного ускорения не остаются постоянными. В точке А векторы a и v направлены противоположно и a 0 . В точке В a 0 ,
в точке С a 0 .
Определим зависимость вектора скорости от времени наблюдения. Ис-
ходя из определения вектора полного ускорения a ddtv , запишем dv adt .
Интегрируя, получим:
vdv
va dt at C.
Константу интегрирования С определим из начальных условий: пусть в начале наблюдения при t = 0 материальная точка имела скорость v = v0 , тогда C = v0 , а зависимость вектора скорости от времени принимает вид:
v = v0 at.
Проецируя каждый вектор на оси координат, получим
21
vx v0 x axtvy v0 y ayt ,
тогда модуль скорости v 
 vx2 v2y .
vx2 v2y .
Аналогично определим зависимость радиус-вектора r материальной точки от времени наблюдения. Из определения вектора скорости v = drdt за-
пишем dr vdt . Интегрируя, получим:
r dr
r vdt v0 at dt
r v0t at2 C. 2
Константу интегрирования определим из начальных условий: пусть в начальный момент отсчета времени t = 0 материальная точка имела радиусвектор r r0 , тогдa C r0 , а зависимость радиус-вектора от времени принимает вид:
r r |
+ v t |
at2 |
. |
(1.5) |
|
||||
0 |
0 |
2 |
|
|
|
|
|
|
Если в момент времени t = 0 радиус-вектор r0 0 (точка начинает дви-
жение из начала координат), тогда r v0t at2 . 2
Для определения положения материальной точки в любой момент времени спроецируем каждый вектор, входящий в уравнение (1.5), на оси координат:
|
|
|
|
axt2 |
|
|
||
x x0 |
v0 xt |
|
|
|
|
|
||
2 |
|
|
|
|||||
|
|
|
|
|
, |
(1.6) |
||
|
|
|
|
|
a t2 |
|||
y y |
|
v |
t |
|
|
|
||
|
|
y |
|
|
||||
|
|
|
|
|
|
|
||
|
0 |
0 y |
|
|
|
|
|
|
|
2 |
|
|
|
||||
|
|
|
|
|
|
|
||
где координата x rx есть проекция радиус-вектора на ось Ох, |
координата |
|||||||
y ry – проекция радиус-вектора на ось Оу.