

Потенциальная энергия упругих сил
По
определению потенциальной энергии
 . Согласно
закону Гука
. Согласно
закону Гука (рис.
1.31), и
(рис.
1.31), и 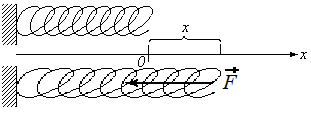
Рис. 1.31.
 .
.
Примем,
что в недеформированном состоянии
(x = 0)
пружина имеет потенциальную энергию
равную нулю, тогда постоянная интегрирования
C
равна нулю ( ).
Потенциальная энергия упругих сил:
).
Потенциальная энергия упругих сил:
 .
.
Графиком зависимости потенциальной энергии пружины от величины деформации х будет парабола.
Градиент скалярного поля
 Скалярным
полем
называют область пространства, каждая
точка которого характеризуется некоторой
скалярной величиной, например,
температурой, освещенностью или значением
потенциальной энергии материальной
точки в силовом поле.
Скалярным
полем
называют область пространства, каждая
точка которого характеризуется некоторой
скалярной величиной, например,
температурой, освещенностью или значением
потенциальной энергии материальной
точки в силовом поле.
Поверхностью
уровня
скалярного поля называют совокупность
точек пространства, в которых скалярная
величина имеет одно и то же значение.
Например, поверхностью уровня потенциальной
энергии тела в гравитационном поле
Земли является сфера (рис. 1.32).
 и
и , когда
, когда Чем большеr,
тем больше значение потенциальной
энергии.
Чем большеr,
тем больше значение потенциальной
энергии.
Рис. 1.32.
 Силы
поля перпендикулярны поверхности
уровня. Действительно, при перемещении
по поверхности уровня работа сил поля
Силы
поля перпендикулярны поверхности
уровня. Действительно, при перемещении
по поверхности уровня работа сил поля
 , так как
потенциальная энергия на поверхности
постоянна. С другой стороны,
, так как
потенциальная энергия на поверхности
постоянна. С другой стороны, , следовательно,
, следовательно, , т. е.
, т. е. .
.
Рассмотрим
некоторое скалярное поле (рис. 1.33). При
перемещении по направлению вектора
 на величинуΔs,
мы переходим из точки P0,
в которой потенциальная энергия равна
Wп,
в точку P,
где потенциальная энергия имеет значение
Wп+ΔWп.
Производной скалярного поля по направлению
вектора
на величинуΔs,
мы переходим из точки P0,
в которой потенциальная энергия равна
Wп,
в точку P,
где потенциальная энергия имеет значение
Wп+ΔWп.
Производной скалярного поля по направлению
вектора
 называют
величину
называют
величину
Рис. 1.33.
 .
.
Эта
величина характеризует изменение
скалярного поля при перемещении на
единицу длины в заданном направлении.
В направлении нормали
 к поверхности
уровня изменение потенциальной энергии
на единицу длины принимает максимальное
значение. Из рисунка 1.33 видно, что
к поверхности
уровня изменение потенциальной энергии
на единицу длины принимает максимальное
значение. Из рисунка 1.33 видно, что ,Δn
– кратчайшее расстояние между
поверхностями уровня. Тогда и
,Δn
– кратчайшее расстояние между
поверхностями уровня. Тогда и
 .
.
Введем понятие вектора градиента скалярного поля:
 ,
,
где
 –
единичный вектор, направленный в сторону
максимального увеличения скалярного
поля. Таким образом, градиент скалярного
поля – это вектор, по модулю равный
изменению скалярной величины (в данном
случае потенциальной энергии) на единицу
длины в направлении нормали к поверхности
уровня. Направлен вектор градиента
перпендикулярно поверхности уровня в
сторону возрастания этой скалярной
величины.
–
единичный вектор, направленный в сторону
максимального увеличения скалярного
поля. Таким образом, градиент скалярного
поля – это вектор, по модулю равный
изменению скалярной величины (в данном
случае потенциальной энергии) на единицу
длины в направлении нормали к поверхности
уровня. Направлен вектор градиента
перпендикулярно поверхности уровня в
сторону возрастания этой скалярной
величины.
В координатной форме вектор градиента потенциальной энергии можно записать как
 .
.
Сумму частных производных по координатам, умноженных на соответствующие орты осей, называют оператором набла и обозначают следующим образом: .
 .
.
Опрератор набла может действовать как на скалярную, так и на векторную функцию координат. Если функция скалярная, то, действуя на нее, оператор набла дает ее градиент. Запись Wп следует читать: “градиент потенциальной энергии”.
Связь силы и потенциальной энергии
Пусть
некоторое тело перемещается в потенциальном
поле. При этом консервативные силы поля
совершают над телом работу А,
равную убыли потенциальной энергии (А
= –dWп).
Элементарная работа на пути ds:
 , гдеα
– угол между векторами силы и перемещения.
Как следует из рис.1.33, dscosα
= dn
– кратчайшему расстоянию между начальной
и конечной поверхностями уровня поля.
Итак,
, гдеα
– угол между векторами силы и перемещения.
Как следует из рис.1.33, dscosα
= dn
– кратчайшему расстоянию между начальной
и конечной поверхностями уровня поля.
Итак,
 .
Тогда
.
Тогда
 , или в векторной
форме
, или в векторной
форме
 .
.