

diplom[ishodniki] / work / 6. РАСЧЕТ И АНАЛИЗ ДИНАМИЧЕСКИХ И СТАТИЧЕСКИХ ХАРАКТЕРИСТИК АВТОМАТИЗИРОВАННОГО ЭЛЕКТРОПРИВОДА
.docx-
Расчет и анализ динамических и статических характеристик автоматизированного электропривода
-
Разработка компьютерной (имитационной) модели автоматизированного электропривода.
-
На основании выбранной математической модели выполним построение имитационной модели автоматизированного электропривода в среде MATLAB 7.8 c использованием идеализированной модели формирования напряжения на входе блока «Asynchronous Machine SI Units».
Так как, все необходимые расчеты были выполнены в предыдущем разделе, выполним настройку всех блоков имитационной модели. Некоторые элементы реализованы в виде подсистем при помощи блока "Subsystem". Все подсистемы подсвечены графически и имеют каждая своё название.
На основании структурной схемы электропривода при стабилизации напора составим имитационную модель автоматизированного электропривода, представленную на рисунке 6.1.
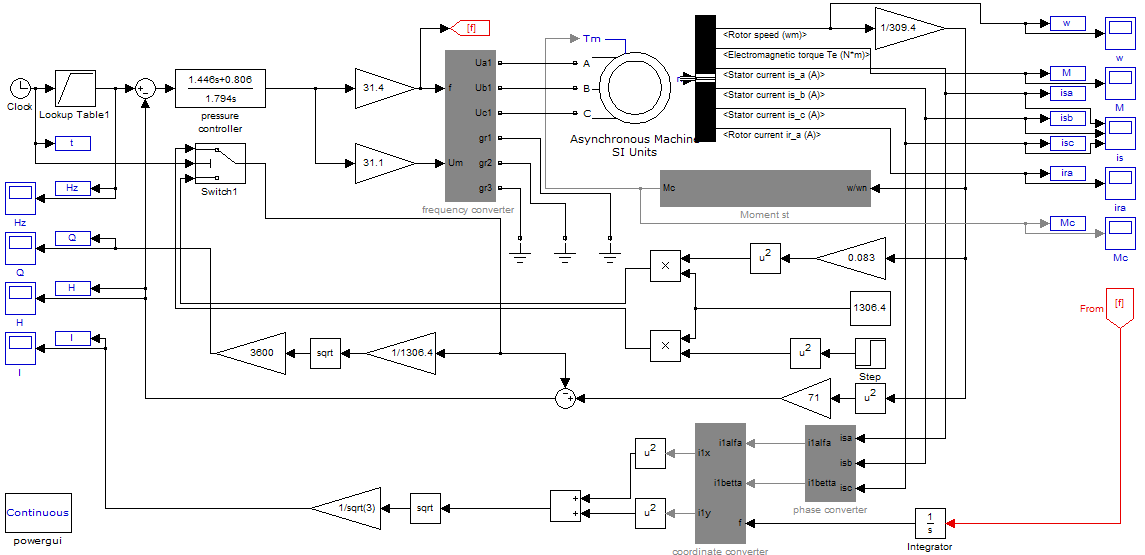
Рисунок 6.1 - Имитационная модель автоматизированного электропривода при частотном управлении по закону U/f=const при стабилизации напора в рабочем диапазоне частот
Так как в имитационной модели присутствуют подсистемы, целесобразно привести структурные схемы данных блоков.
Так подсистема “frequency converter” представляет собой преобразователь частоты, на вход которой подаётся заданное значение частоты f и амплитуда питающего напряжения Um. Структурная схема представлена на следующем рисунке:

Рисунок 6.2 - Структурная схема модели подсистемы "frequency converter " – Преобразователь частоты
Определение статического момента представлено выражением, определяющим статический момент электропривода, выражение заключено в подсистему с названием “Moment st”. На вход подсистемы подаётся отношение текущей скорости к номинальной. Структурная схема приведена на следующем рисунке:
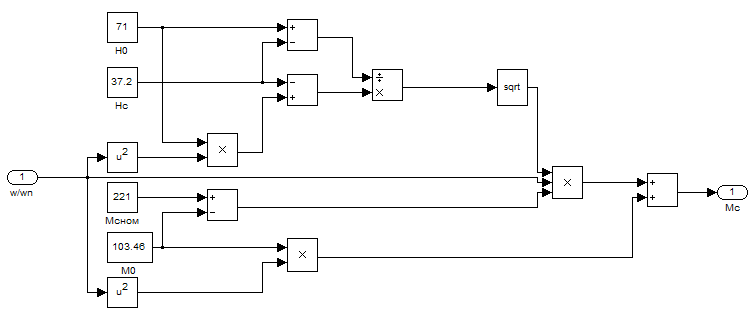
Рисунок 6.3 - Структурная схема модели подсистемы “Moment st” – Определение статического момента
Действующее значение тока двигателя определяется на основании фазных и координатных преобразований в подсистемах "phase converter" - Преобразователь фаз и "coordinate converter" - Преобразователь координат. Преобразования выполняются в соответствии со следующими выражениями:
- преобразование из трехфазной системы координат в двухфазную ("phase converter" - Преобразователь фаз):
 (6.1)
(6.1)
где
i1α, i1β - проекции токов статора в системе координат α-β;
i1a, i1b, i1c - мгновенные значения фазных токов обмотки статора;
- преобразование из неподвижной системы координат во вращающуюся систему координат ("coordinate converter" - Преобразователь координат):
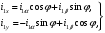 (6.2)
(6.2)
где
i1x, i1y - проекции токов статора во вращающейся системе координат х-у;
φ - угол поворота системы координат.
Действующее значение тока определяется из выражения
 (6.3)
(6.3)
Структурные схемы моделей подсистем "phase converter" - Преобразователь фаз и "coordinate converter" - Преобразователь координат представлены на рисунках 6.4 и 6.5 соответственно.

Рисунок 6.4 - Структурная схема модели подсистемы "phase converter" - Преобразователь фаз

Рисунок 6.5 - Структурная схема модели подсистемы "coordinate converter" - Преобразователь координат
Для моделирования асинхронного двигателя используется стандартный блок Asynchronous Machine SI Units, расположенный в разделе Machines библиотеки SimPowerSystems. Так как блок имеет широкий диапазон настроек, приведём для наглядности основное окно настроек с используемыми рассчитанными параметрами:
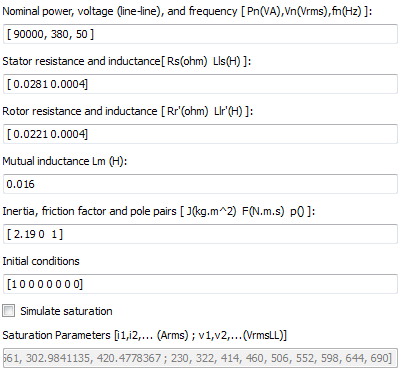
Рисунок 6.6 – Основное окно настройки параметров блока асинхронной машины Asynchronous Machine SI Units
-
Расчет переходных процессов и определение показателей качества.
Для отображения переходных процессов на диаграммах, произведём моделирование пуска двигателя насосной установки и разгона его до номинальной скорости (ωном = 309,4рад/с; Q ном = 300м3/ч; H зд = H ном = 62м). При достижении номинальной скорости, в момент времени 10с изменим значение расхода питьевой воды до Q изм = 250м3/ч. Данное манипулирование значением расхода жидкости позволит проанализировать полученные данные и сделать необходимые выводы. Графики переходных процессов представлены на следующих рисунках:
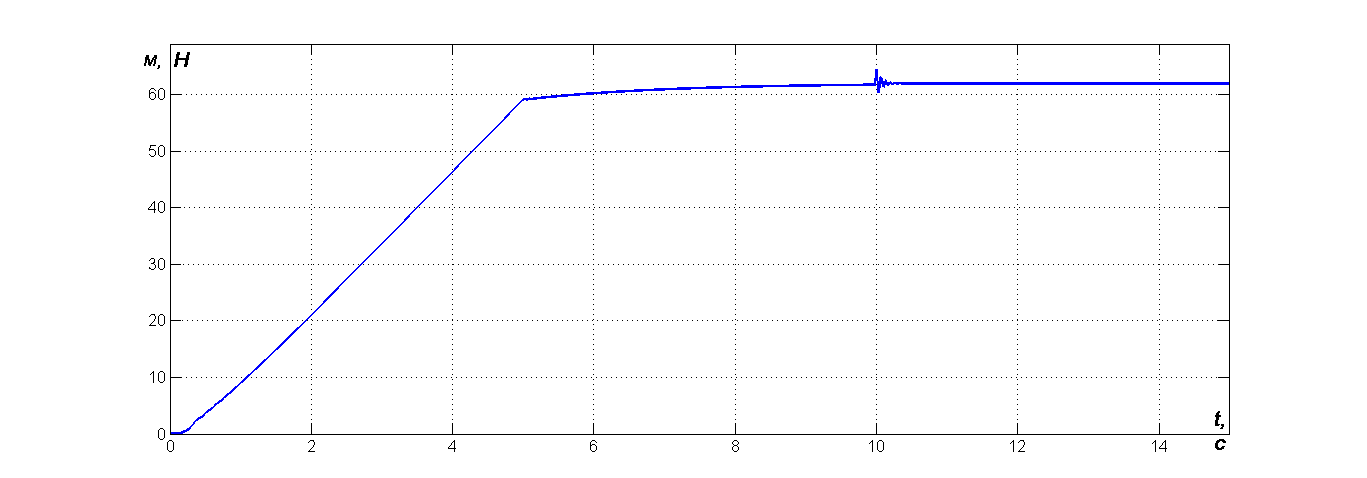
Рисунок 6.8 - График зависимости напора от времени во время пуска электродвигателя 5АМ250М2 от преобразователя частоты

Рисунок 6.9 - График зависимости угловой скорости от времени во время пуска электродвигателя 5АМ250М2 от преобразователя частоты
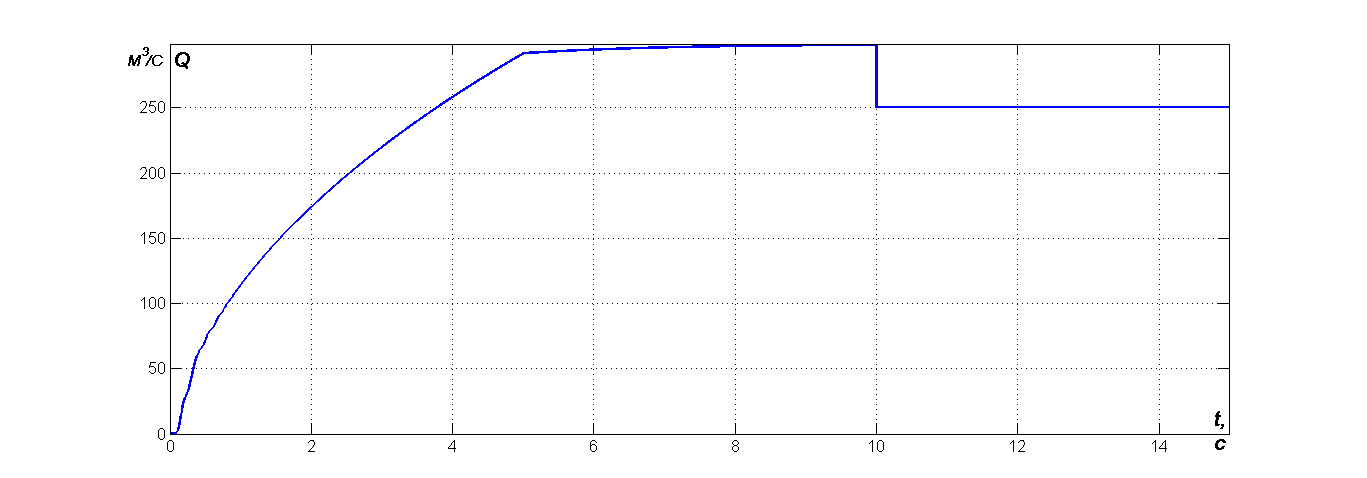
Рисунок 6.10 - График зависимости расхода от времени во время пуска электродвигателя 5АМ250М2 от преобразователя частоты

Рисунок 6.11 - График зависимости статического момента от времени во время пуска электродвигателя 5АМ250М2 от преобразователя частоты

Рисунок 6.12 - График зависимости электромагнитного момента от времени во время пуска электродвигателя 5АМ250М2 от преобразователя частоты
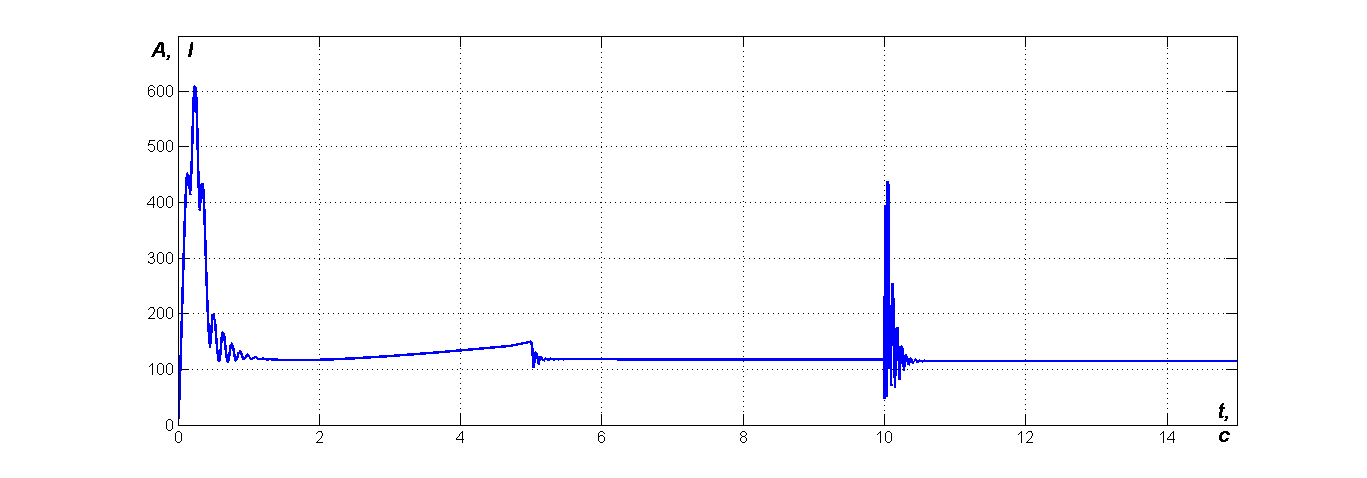
Рисунок 6.13 - График зависимости действующего значения тока статора от времени во время пуска электродвигателя 5АМ250М2 от преобразователя
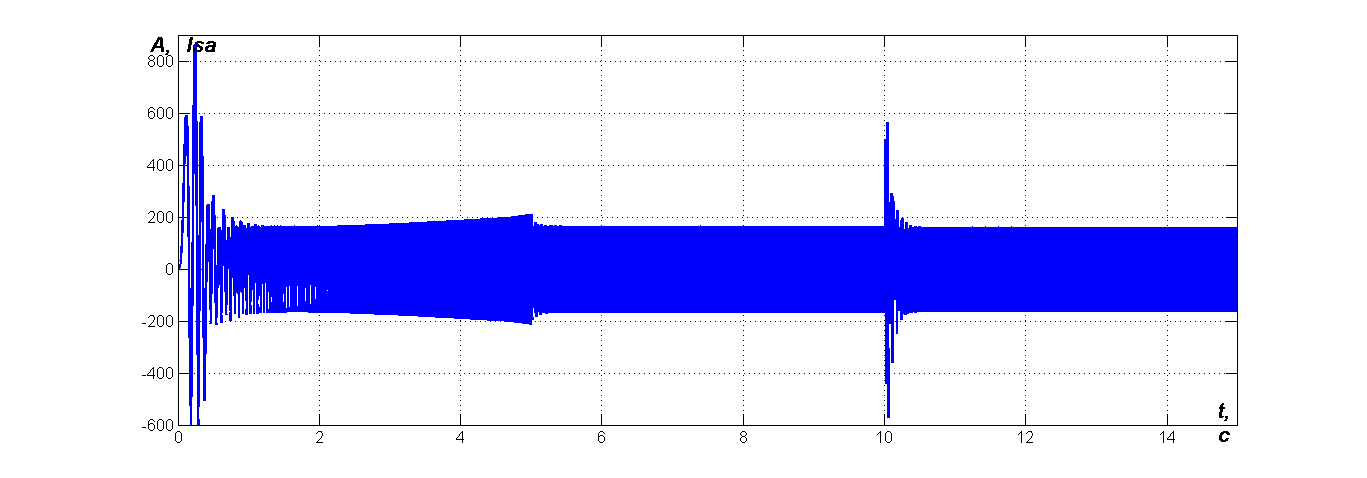
Рисунок 6.14 - График зависимости мгновенного значения тока статора от времени во время пуска электродвигателя 5АМ250М2 от преобразователя частоты
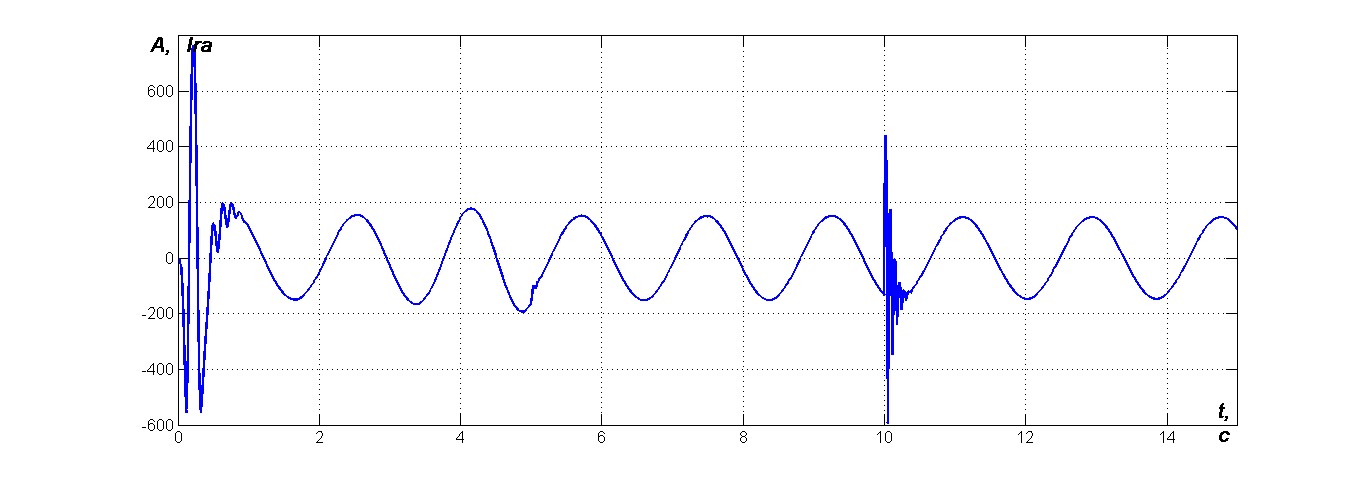
Рисунок 6.15 - График зависимости мгновенного значения тока ротора от времени во время пуска электродвигателя 5АМ250М2 от преобразователя частоты
В результате компьютерного имитационного моделирования были получены переходные процессы автоматизированного электропривода насосной установки для подачи питьевой воды на предприятие МНПЗ.
Определение показателей качества системы будет определяться такими параметрами, как величина регулирования, время регулирования и числом колебаний исходной величины до установившегося значения за время переходного процесса.
Для оценки перерегулирования нашей системы проанализируем график переходного процесса зависимости угловой скорости от времени, а именно рисунок 6.9. Как можно убедиться, перерегулирование будет очень низким, что объясняется наличием задатчика интенсивности. Таким образом колебательность системы можно принять близкой к нулю, так как значения не превосходят 5% от установившегося режима.
Быстродействие, определяемое временем достижения системой значения установившегося состояния, составляет порядка 5 секунд.
-
Расчет зависимости задающего воздействия от времени U3—f(t) для реализации технологического процесса за цикл работы.
Основная задача насоса – поддержание напора на заданном уровне (Hзд = 62 м).
Объект управления можно реализовать относительно напора Н на выходе трубопровода при переменном расходе Q воды. Это не трудно представить следующим уравнением:
 (6.2)
(6.2)
где
С – коэффициент, зависит от свойств магистрали.
Из графиков видно, что переходные процессы при пуске протекают без значительных колебаний и отклонений регулируемой величины от заданного значения. Процесс пуска происходит с примерно постоянным ускорением. Стабилизация напора при изменении расхода происходит без резких скачков и колебаний.
Задание напора в данной имитационной модели организовано с помощью блока линейной интерполяции“ Lookup Table ”. Окно настройки данного блока представлено на следующем рисунке:
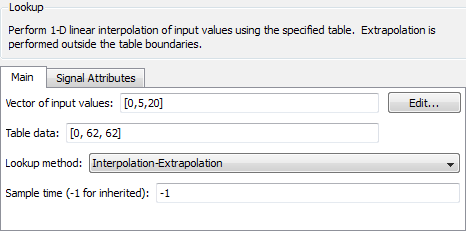
Рисунок 6.6 – Основное окно настройки параметров линейной интерполяции LookUP Table
Данный блок позволяет задать закон изменения напора, которого необходимо достичь. В данном случае с помощью таблицы данных задан следующий линейный закон для напора: в начальный момент времени напор отсутствует и равен нулю. При истечении времени в 5 секунд, напор должен достичь отметки в 62 метра и остаться на этом уровне. 5 секунд выдержки времени, говорит о времени пуска двигателя. Характеристика отображающая данную зависимость изображена на следующем рисунке:

Рисунок 6.7 - График зависимости задания напора от времени во время пуска электродвигателя 5АМ250М2 от преобразователя частоты
-
Построение статических характеристик электропривода, соответствующих зависимости U3=f(i) за цикл работы.
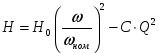
Согласно выбранному закону частотного управления, а именно U/f = const построим семейство механических характеристик идеализированного асинхронного двигателя, при частотном управлении при квадратичном статическом моменте. Эти характеристики можно представить следующей системой урпвнений:
 (6.5)
(6.5)
где
 - относительная частота.
- относительная частота.
Подставим рассчитанные ранее значения в эту систему и используя программу Microsoft Office Excel 2007 построим ряд механических характеристик варьируя при этом значения относительной частоты от 1 до 0,6 с шагом в 0,2. Система примет следующий вид:
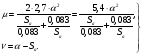 (6.6)
(6.6)
Построим семейство полученных механических характеристик в относительных единицах и изобразим их на следующем рисунке:

Рисунок 6.16 - Механические характеристики электродвигателя 5АМ250М2 при частотном управлении по закону U/f = const