

diplom[ishodniki] / work / 5. ПРОЕКТИРОВАНИЕ СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
..docx-
Проектирование системы автоматического управления.
-
Выбор датчиков для измерения управляемых координат электропривода
-
Регулируемой координатой в нашей системе является давление, поэтому необходимо выбрать датчик этого параметра, предназначенный для преобразования значения абсолютного давления в электрический выходной сигнал. Выбор датчика осуществляется по значению давления.
В качестве датчика обратной связи по давлению выбираем датчик CER-8000 KLAY, основные технические данные которого приведены в таблице 5.1.
Таблица 5.1
Основные технические данные датчика давления CER-8000 KLAY
|
Диапазон измерений давления |
0.2…350 бар (настраиваемый) |
|
Выходной сигнал |
4…20 мА |
|
Точность измерения |
0.2% от заданного диапазона измерения |
|
Напряжение питания датчика давления и уровня |
12…40 В DC |
|
Рабочая температура |
-20…+100 °C |
|
Класс защиты датчика |
IP66 |
|
Вес |
0.6 кг |
Серия данных датчиков, а именно CER-8000 – это общепромышленная серия преобразователей давления в цельно-металлическом, корпусе из нержавеющей стали. Это высококачественные датчики давления, основанные на керамическом сенсоре, с очень высоким пиковым давлением.
-
Составление математических моделей (уравнений, структурных схем) объекта управления, датчиков и исполнительного устройства
Структурную схему, отражающую динамические своиства электропривода турбомеханизмов можно взять из источника и риведём её на рисунке
Это нелинейная система, которую можно использовать при имитационном моделировании. Линеаризуем эту систему для синтеза регулятора Wp, приняв передаточную функцию АД в виде
 (5.1)
(5.1)
а статический момент Мс линейно зависящий от скорости
 (5.2)
(5.2)
Где
 (5.3)
(5.3)
 (5.4)
(5.4)
 (5.5)
(5.5)
 (5.6)
(5.6)
 (5.7)
(5.7)

Рисунок 5.1 - Структурная схема электропривода при стабилизации напора в рабочем диапазоне частот
Wp – передаточная функция регулятора;
WD – передаточная функция АД;
β – модуль жесткости механической характеристики АД при данном статическом моменте;
βс – модуль жесткости механической характеристики турбомеханизма;
Sк.е – критическое скольжение на естественной механической характеристике АД;
Tэ – электромагнитная постоянная времени АД.
В результате получаем линеаризованную структурную схему, приведенную на рисунке 5.2, где
 (5.8)
(5.8)
H1 – напор турбомеханизма при Q = 0 и данной скорости ω.
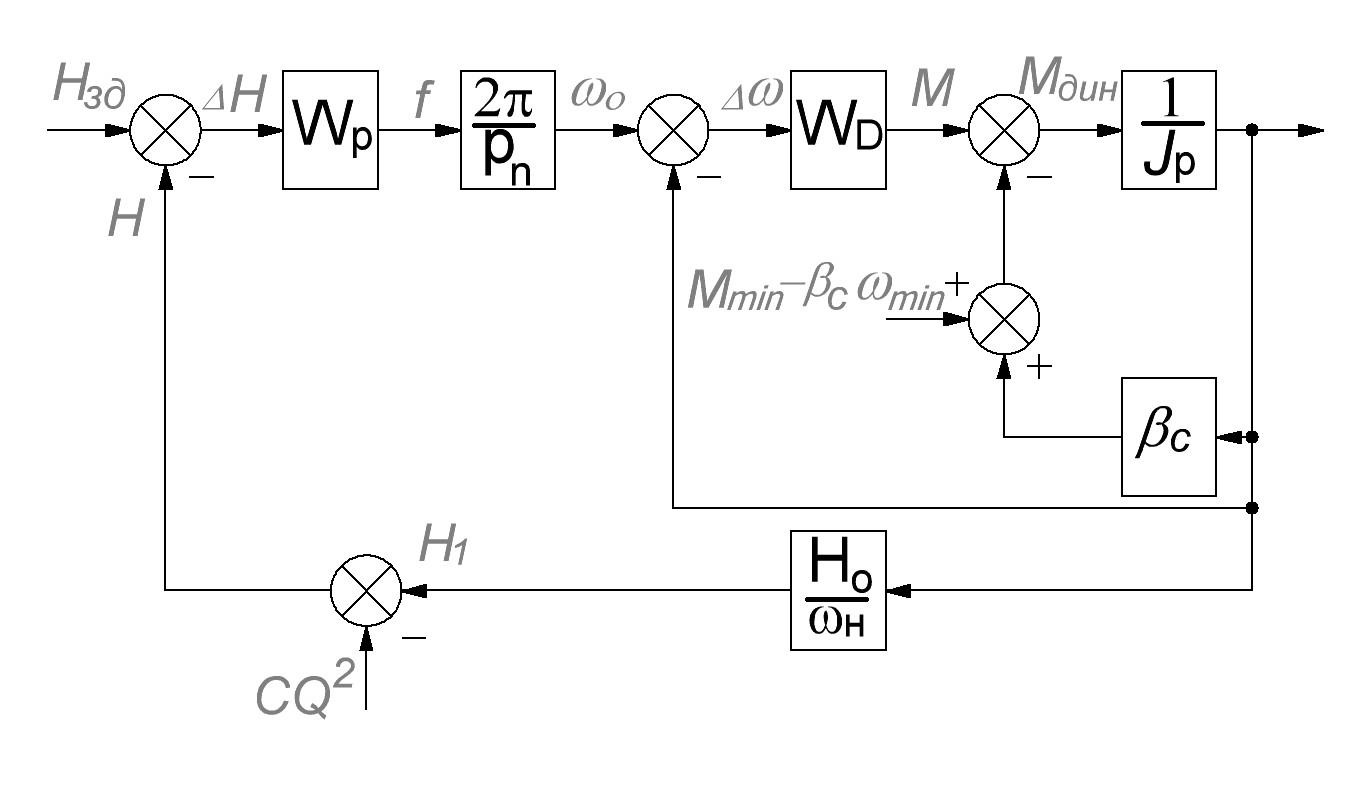
Рисунок 5.2 - Линеаризованная структурная схема электропривода при стабилизации напора в рабочем диапазоне
Структурную схему рисунке 5.2 можно преобразовать к более удобному виду (рисунок 5.3).
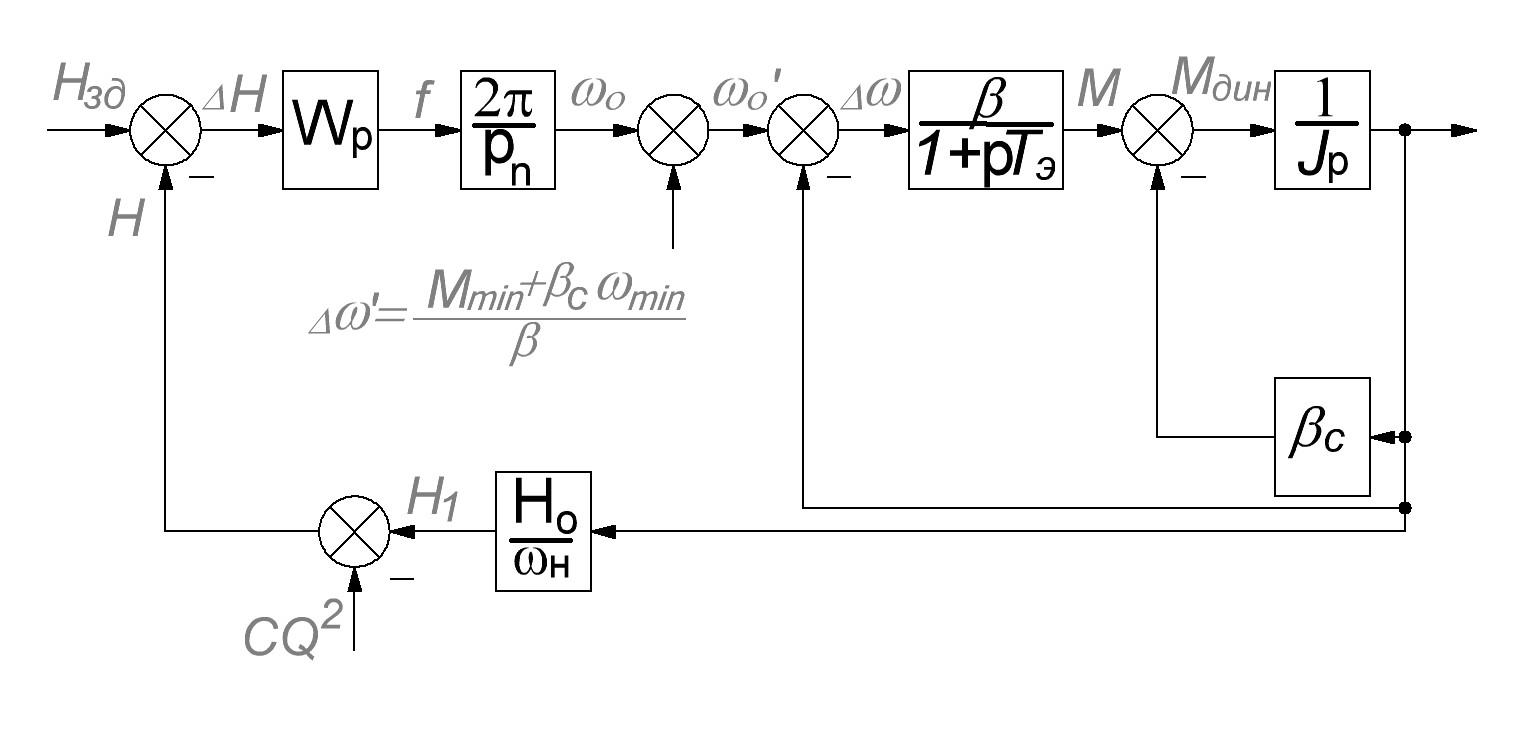
Рисунок 5.3 - Преобразованная линеаризованная структурная схема электропривода
Для структурной схемы рисунок 5.4, полученной из рисунка 5.3, рассмотрим передаточную функцию от возмущающего воздействия Q'L:

Рисунок 5.4 - Окончательный вид линеаризованной структурной схемы
Следующие уравнения описывают приведённую выше, линеаризованную структурную схему:
 при Hз (р)
= 0, (5.9)
при Hз (р)
= 0, (5.9)
где
 (5.10)
(5.10)
 (5.11)
(5.11)
 (5.12)
(5.12)
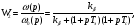
Обычно в электроприводе турбомеханизма предусматривается ПИ-регулятор давления с передаточной функцией:
 (5.13)
(5.13)
Подставляем (5.13) в (5.10) и с учетом (5.11) находим:
 (5.14)
(5.14)
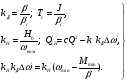
где
 (5.15)
(5.15)
 (5.16)
(5.16)
Тогда
 (5.17)
(5.17)
где
 (5.18)
(5.18)
Постоянную интегрирования Ти регулятора давления принимаем равной:
 (5.19)
(5.19)
Тогда:
 (5.20)
(5.20)
 (5.21)
(5.21)
Коэффициент усиления регулятора давления находим из следующего условия:
 (5.22)
(5.22)
Откуда станет известно:
 (5.23)
(5.23)
-
Расчет параметров объекта управления, датчиков и исполнительного устройства.
Объектом управления является асинхронный двигатель. Линеаризованная структурная схема асинхронного двигателя представлена на рисунке 5.5:

Рисунок 5.5 – Линеаризованная структурная схема асинхронного двигателя
Необходимо рассчитать основные параметры эквивалентной схемы замещения двигателя, это уже было сделано в третьей главе настоящего дипломного проекта, поэтому продублируем результаты данного расчёта:
Номинальное скольжение:
 (5.24)
(5.24)
Номинальная угловая скорость:
 (5.25)
(5.25)
Синхронная угловая скорость:
 (5.26)
(5.26)
Номинальные потери мощности:
 (5.27)
(5.27)
Принимаем:
 , (5.28)
, (5.28)

 (5.28)
(5.28)
Момент холостого хода:
 (5.29)
(5.29)
Электромагнитный номинальный момент:
 (5.30)
(5.30)
Переменные номинальные потери мощности в роторе:
 (5.31)
(5.31)
Задаемся коэффициентом загрузки kз,m, соответствующим максимальному к.п.д. АД:
kз,m = 0,5 – 1,0.
Переменные номинальные потери мощности при kз,m = 0,9:
 (5.32)
(5.32)
Постоянные потери мощности:
 (5.33)
(5.33)
Переменные номинальные потери мощности в обмотках статора:
 (5.34)
(5.34)
Активное сопротивление обмотки статора:
 (5.35)
(5.35)
Максимальное значение электромагнитного момента:
 (5.36)
(5.36)
Коэффициент:
 (5.37)
(5.37)
Сопротивление:
 (5.38)
(5.38)
Приведенное активное сопротивление фазы ротора:
 (5.39)
(5.39)
Индуктивное сопротивление короткого замыкания:
 (5.40)
(5.40)
Критическое скольжение:
 (5.41)
(5.41)
Коэффициент a:
 (5.42)
(5.42)
Рассчитывает электромагнитный момент АД по формуле Клосса для найденных параметров и скольжения S = Sном:
 (5.43)
(5.43)
Сравниваем Мэ.ном, рассчитанный по формуле (5.30), с М(Sном). Если погрешность Δm превышает допустимую (обычно 5-10%), то корректируем kз,m и М0 , а затем повторяем расчет до получения требуемой погрешности.
 (5.44)
(5.44)
Погрешность Δm не выходит за допустимые пределы, следовательно перерасчет производить не надо.
Принимаем:
 (5.45)
(5.45)
Ток холостого хода:
 (5.46)
(5.46)
Эквивалентное сопротивление намагничивающего контура:
 (5.47)
(5.47)
Синус 0 холостого хода
 (5.48)
(5.48)
Индуктивное сопротивление намагничивающего контура:
 (5.49)
(5.49)
Определив значения сопротивлений, рассчитываем значения индуктивностей:
 Гн, (5.50)
Гн, (5.50)
 Гн, (5.51)
Гн, (5.51)
 Гн. (5.52)
Гн. (5.52)
Индуктивности рассеивания статора и ротора:
 (5.53)
(5.53)
 (5.54)
(5.54)
Рассчитаем эквивалентные сопротивления, индуктивности цепи статора и эквивалентную постоянную времени статора.
Эквивалентная индуктивность цепи статора:
 Гн. (5.55)
Гн. (5.55)
Эквивалентное сопротивление цепи статора:
 (5.56)
(5.56)
Электромагнитная постоянная времени статора:
 . (5.57)
. (5.57)
Электромагнитная постоянная времени ротора:
 (5.58)
(5.58)
Модуль жесткости механической характеристики:
 (5.59)
(5.59)
где Мк - критический момент, определяемый по формуле:

Тогда передаточная функция асинхронного двигателя примет вид:

-
Проектирование регуляторов на основании разработанных математических моделей и требований к автоматизированному электроприводу
Учитывая что насосная установка работает с постоянной нагрузкой, применим в нашей системе скалярное частотное управление по закону U/f = const.
При скалярном частотном управлении скорость АД регулируется за счет изменения частоты и амплитуды напряжения. Все законы скалярного управления обеспечивают достижение требуемых статических характеристик и используются в электроприводе со "спокойной" нагрузкой.
Функциональная схема такого частотного управления может быть представлена в следующем виде:
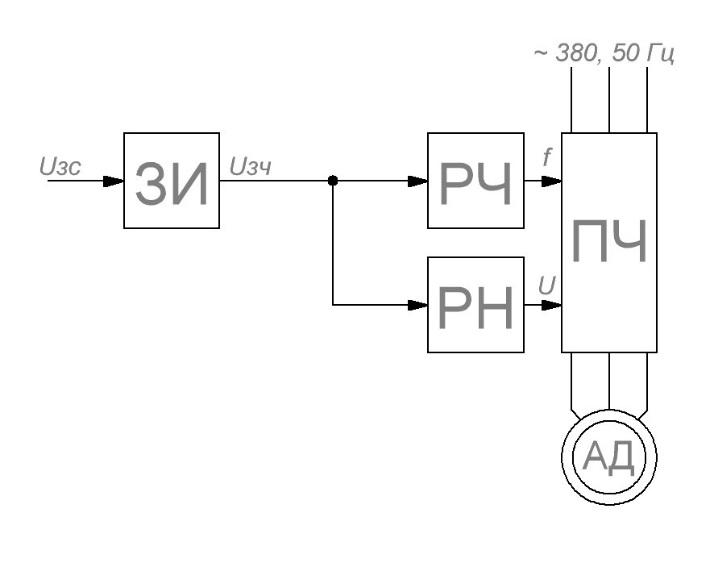
Рисунок 5.5 – Функциональная схема асинхронного электропривода при частотном управлении по закону U/f = const.
На схеме введены следующие обозначения:
ЗИ – задатчик интенсивности;
РЧ – регулятор частоты;
РН – регулятор напряжения;
ПЧ – преобразователь частоты;
АД – асинхронный двигатель;
UЗС – напряжение задания скорости;
UЗЧ – напряжение задания частоты;
f – заданная частота;
U – заданное напряжение.
Согласно подпункту 5.2, в электроприводе турбомеханизма будем использовать ПИ-регулятор давления, имеющий следующую передаточную функцию:
 (5.59)
(5.59)
где
 (5.60)
(5.60)
Постоянная интегрирования регулятора давления:
 (5.61)
(5.61)
где
 (5.62)
(5.62)
 (5.63)
(5.63)
 .
.
Передаточная функция регулятора:
 (5.64)
(5.64)
Коэффициент [3]:

Рассчитав все параметры системы, можно изобразить их, подставляя в структурную схему электропривода со стабилизацией напора на следующем рисунке:

Рисунок 5.6 - Структурная схема электропривода с рассчитанными параметрами системы