

diplom[ishodniki] / До Мигдалёнка / Основной текст
.pdfМинистерство образования Республики Беларусь БЕЛОРУССКИЙ НАЦИОНАЛЬНЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
|
|
|
Кафедра «Электропривод и автоматизация |
|
У |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
промышленных установок и технологических комплексов» |
||||||||||
|
|
|
|
|
|
|
|
|
|
Т |
|
|
|
|
|
|
А.А. Мигдалёнок |
|
Н |
|
|||
|
|
|
|
|
|
|
|
Б |
|
|
|
|
|
|
|
МОДЕЛИРОВАНИЕ |
|
|
|
||||
|
|
ЭЛЕКТРОПРИВОДА НА ЭВМ |
|
||||||||
|
|
|
|
|
|
|
и |
|
|
|
|
|
|
Учебно-методическое пособ е для студентов |
|
|
|||||||
|
|
|
|
|
|
р |
|
|
|
|
|
специальности 1-53 01 05 «Автомат з йрованные электроприводы» |
|||||||||||
|
|
|
|
|
о |
|
|
|
|
|
|
|
|
|
|
|
|
В 2 частях |
|
|
|
|
|
|
|
|
|
|
т |
|
|
|
|
|
|
|
|
|
и |
Часть 2 |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|||
|
|
Рекомендовано учебно-методическим объединением |
|
||||||||
|
|
|
з |
|
|
|
|
|
|
|
|
|
высших учебных аведен й Республики Беларусь по образованию |
||||||||||
|
в |
области |
автоматизации технологических процессов, |
|
|||||||
|
|
|
|
||||||||
|
п |
|
|
производств и управления |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
||
е |
|
|
|
|
|
|
|
|
|
|
|
Р |
|
|
|
|
|
|
|
|
|
|
|
Минск
БНТУ
2010
1
УДК 62-83:001.891.54:004(075.8)
ББК 31.291я7
|
М57 |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
Рецензенты: |
|
|
|
У |
|||
|
|
|
|
|
С.Н. Павлович, О.Ф. Опейко |
|
|
||||||
|
|
|
|
|
|
Т |
|||||||
|
|
|
Мигдалёнок, А.А. |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
Н |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
||
М57 |
|
Моделирование |
электропривода на ЭВМ: учебно- |
||||||||||
|
|
методическое пособие для студентов специальности 1-53 01 05 |
|||||||||||
|
|
|
|
|
|
|
|
|
|
Б |
|
|
|
|
|
«Автоматизированные электроприводы»: в 2 ч. / А.А. Миг- |
|||||||||||
|
|
далёнок. – Минск: БНТУ, 2010. – Ч. 2. – 94 с. |
|
|
|
||||||||
|
|
|
ISBN 978-985-525-310-6 (Ч. 2). |
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
и |
|
|
|
|
|
|
|
Во второй части учебно-метод ческого пособия рассмотрены вопросы |
||||||||||
|
|
|
|
|
|
|
р |
|
|
|
|
||
|
|
моделирования силовых преобразователеййэлектрической энергии и основ- |
|||||||||||
|
|
ных систем электропривода. П |
вод тся оп сание параметров настройки и |
||||||||||
|
|
|
|
|
|
го |
|
|
|
|
|
||
|
|
принципа действия, а также п име ы использования основных блоков из |
|||||||||||
|
|
библиотеки силовых элемент в SimPowerSystems. Рассмотрено моделиро- |
|||||||||||
|
|
вание электропривода п с |
янн го тока, электропривода переменного тока |
||||||||||
|
|
на основании асинхр нн |
и синхронного двигателей. Пособие может ис- |
||||||||||
|
|
|
|
|
и |
|
|
|
|
|
|
|
|
|
|
пользоваться студен ами для выполнения контрольной работы по дисци- |
|||||||||||
|
|
плине «Модел рован е в электроприводе», а также для выполнения расче- |
|||||||||||
|
|
|
|
з |
|
|
|
|
|
|
|
|
|
|
|
тов при курсовом тд пломном проектировании. |
|
|
|
|
|||||||
|
|
|
Часть 1 настоящего здания вышла в свет в 2009 г. в БНТУ. |
|
|
||||||||
|
|
|
о |
|
|
|
|
УДК 62-83:001.891.54:004(075.8) |
|||||
|
п |
|
|
|
|
|
ББК 31.291я7 |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
||
е |
|
|
|
|
|
|
|
|
|
|
|
||
Р |
|
|
|
|
|
|
|
|
© Мигдалёнок А.А., 2010 |
||||
ISBN 978-985-525-310-6 (Ч. 2) |
|
||||||||||||
ISBN 978-985-479-943-8 |
|
|
|
© БНТУ, 2010 |
|
|
|||||||
2
делирования электротехнических устройств. В состав библиотеки |
||||||
входят модели пассивных и активных электротехнических элемен- |
||||||
тов, источников энергии, электродвигателей, трансформаторовН |
, ли- |
|||||
|
|
|
|
|
й |
|
ний электропередачи и подобного оборудования. Имеется также |
||||||
раздел, содержащий блоки для моделированияБустройств силовой |
||||||
|
|
|
|
|
виды |
|
электроники, включая системы управлен я для них. Используя спе- |
||||||
циальные возможности Simulink |
SimPowerSystems, пользователь |
|||||
может не только имитировать |
аботу устройств во временной обла- |
|||||
|
|
|
о |
|
|
|
сти, но и выполнять различные |
анализа таких устройств. В |
|||||
частности, пользователь имеет в зможность рассчитать установив- |
||||||
шийся режим рабо ы сис емырна переменном токе, выполнить рас- |
||||||
|
ки |
|
|
|
|
|
чет импеданса (полного с пр |
ивления) участка цепи, получить ча- |
|||||
стотные характер с |
, проанализировать устойчивость, а также |
|||||
з |
|
|
|
|
|
|
выполнить гармон ческтй анализ токов и напряжений. |
|
|||||
Несомненным досто нством SimPowerSystems является то, что |
||||||
о |
|
|
|
|
|
|
сложные электр технические системы можно моделировать, соче- |
||||||
тая мет ды имитационного и структурного моделирования. Напри- |
||||||
Глава 1. МОДЕЛИРОВАНИЕ СИЛОВОЙ ЧАСТИ |
|
|||||
|
|
ЭЛЕКТРОПРИВОДА |
|
|||
1.1. Состав библиотеки SimPowerSystems |
|
|||||
и основные особенности моделирования силовых систем |
||||||
Для моделирования силовой части электропривода используютсяУ блоки из библиотеки SimPowerSystems [1]. Данная библиотекаТявляется одной из множества дополнительных библиотек Simulink, ориентированных на моделирование конкретных устройств. SimPowerSystems содержит набор блоков для имитационного мо-
мер, сил вую часть полупроводникового преобразователя электрической энергии можно выполнить с использованием имитационных
блоков SimPowerSystems, а систему управления – с помощью |
|
обычныхпблоков Simulink, отражающих лишь алгоритм ее работы, |
|
а |
электрическую схему. Такой подход, в отличие от пакетов |
не |
|
схемотехнического моделирования, позволяет значительно упро- |
|
стить всю модель, а значит повысить ее работоспособность и ско- |
|
Ррость |
работы. Кроме того, в модели с использованием блоков |
SimPowerSystems (в дальнейшем – SPS-модели) можно использовать блоки и остальных библиотек Simulink, а также функции само-
3
|
го MATLAB, что дает практически неограниченные возможности |
|||||
|
для моделирования электротехнических систем. |
|
||||
|
Библиотека SimPowerSystems имеет семь основных разделов: |
|||||
|
– Electrical Sources – источники электрической энергии; |
|||||
|
– Connectors – соединители; |
|
|
У |
||
|
|
|
|
|
|
|
|
– Measurements – измерительные и контрольные устройства; |
|||||
|
– Elements – электротехнические элементы; |
Т |
||||
|
– Power Electronics – устройства силовой электроники; |
|||||
|
|
|||||
|
– Machines – электрические машины; |
|
||||
|
– Powerlib Extras – дополнительные электротехнические устройства. |
|||||
|
Используя блоки из этих разделов, пользователь в состоянии за |
|||||
|
короткое время создать полноценную модель достаточно сложной |
|||||
|
электротехнической системы. |
|
|
|
||
|
Методика создания SPS-модели ничем не отличаетсяНот методики |
|||||
|
|
|
|
|
й |
|
|
создания модели на основе базовой библиотеки Simulink. Так же, как |
|||||
|
и для обычной Simulink-модели (далее – S-моделиБ), необходимо вы- |
|||||
|
|
|
|
особенности |
|
|
|
полнить расстановку блоков на схеме, задать их параметры, соеди- |
|||||
|
нить блоки и установить параметры расчета модели в целом. Однако |
|||||
|
SPS-модели имеют и некото ые |
|
. |
|
||
|
|
блоков |
|
|
||
|
1. Входы и выходы SPS- |
, в отличие от блоков Simulink, не |
||||
|
показывают направление пе едачи сигнала, поскольку фактически |
|||||
|
являются эквивален ами элекрических контактов. Таким образом, |
|||||
|
двух направленияхпроводами. В S-моделях же информационный сигнал рас- |
|||||
|
электрический ток |
|
через вх д или выход блока протекать в |
|||
|
двух направлен ях: как вовну рь блока, так и наружу. |
|
||||
|
2. Соединительныеможетл нии между |
блоками являются, по сути, |
||||
|
го |
|
|
|
|
|
|
электрическими |
|
, по которым ток может протекать также в |
|||
|
п |
|
|
|
|
|
|
пространяетсязт лько в одном направлении – от выхода одного блока |
|||||
|
ко входу друг . |
|
|
|
|
|
|
3. S- и SPS-блоки не могут быть непосредственно соединены друг |
|||||
|
с другом. Сигнал от S-блока можно передать к SPS-блоку через |
|||||
еуправля мые источники |
тока |
или |
напряжения, а наоборот – |
|||
Р |
с помощью измерителей тока или напряжения. |
|
||||
|
|
|
|
|
|
|
4. Несколько линий связи (проводов) могут быть соединены между собой. Для выполнения такого соединения должны использоваться специальные блоки – Connectors (соединители).
5. При расчете схемы, содержащей нелинейные блоки, следует использовать методы:
4

– ode15s – многошаговый метод переменного порядка (от 1 до 5), использующий формулы численного дифференцирования;
– ode23tb – неявный метод Рунге-Кутта в начале решения и метод, использующий формулы обратного дифференцирования 2-го
|
порядка, в последующем. |
|
|
|
|
|
|
|
У |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
Данные методы дают наилучшие результаты по быстродействию. |
|||||||||||||||
|
|
При указании параметров элементов могут использоваться абсо- |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Т |
||
|
лютные и относительные единицы. Система абсолютных единиц |
||||||||||||||||
|
приведена в табл. 1.1. |
|
|
|
|
|
|
|
Н |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
аблица 1.1 |
||
|
|
|
|
|
|
Система абсолютных единиц |
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Б |
|
|
|
|
|
|
|
Параметр |
|
|
|
Обозначение |
|
Единицы измерения |
|
|||||||
|
Time (время) |
|
|
|
|
|
|
second |
|
|
|
s (с) |
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
й |
|
|
|
|
|
|
|
Length (расстояние) |
|
|
|
|
meter |
|
|
|
m (м) |
|
|
|||||
|
Mass (масса) |
|
|
|
|
|
|
kilogram |
|
|
kg (кг) |
|
|
||||
|
Energy (энергия) |
|
|
|
|
|
joule |
|
|
J (Дж) |
|
|
|||||
|
Current (ток) |
|
|
|
|
|
|
ampere |
|
|
|
A (А) |
|
|
|||
|
Voltage (напряжение) |
|
|
|
|
volt |
|
|
|
V (В) |
|
|
|||||
|
Active power (активная мощ- |
|
watt |
|
|
W (Вт) |
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
ность ) |
|
|
|
|
|
|
|
и |
|
|
|
|
|
|
||
|
Apparent power (полная м щ- |
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
т |
|
volt-ampere |
|
|
VA (ВА) |
|
|
||||
|
ность) |
|
|
|
|
|
|
р |
|
|
|
|
|
|
|
||
|
|
|
|
|
ивная |
о |
|
|
|
|
|
|
|
|
|||
|
Reactive power (реак |
|
|
var |
|
|
var (ВАр) |
|
|
||||||||
|
мощность) |
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
з |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Impedance (полное сопрот вление) |
|
ohm |
|
|
Ohm (Ом) |
|
|
|||||||||
|
Resistance (сопрот вле |
е) |
|
|
ohm |
|
|
Ohm (Ом) |
|
|
|||||||
|
|
|
о |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
Inductance (индуктивность) |
|
henry |
|
|
H (Гн) |
|
|
|||||||||
|
Capacitance (емк сть) |
|
|
|
|
farad |
|
|
|
F (Ф) |
|
|
|||||
|
Flux linkage ( т к сцепление) |
|
volt-second |
|
|
V·s (B·c) |
|
|
|||||||||
|
е |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Rotation speed (угл вая ско- |
|
radians per |
|
|
rad/s (рад/с) |
|
|
|||||||||
|
рость) |
|
|
|
|
|
|
|
second |
|
|
|
|
|
|
||
Р |
п |
|
|
|
|
|
revolutions per |
|
|
rpm (Об/мин) |
|
||||||
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
minute |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
Torque (момент) |
|
|
|
|
newton-meter |
|
|
N·m (Н·м) |
|
|
||||||
|
Inertia (момент инерции) |
|
|
kilogram-meter2 |
|
|
kg·m2 (кг·м2) |
|
|||||||||
|
Friction factor (коэффициент |
newton-meter- |
|
|
N·m·s (Н·м·с) |
|
|||||||||||
|
трения) |
|
|
|
|
|
|
|
second |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
5
В некоторых моделях для задания параметров используются также и относительные единицы (p.u., о.е.). Общая формула для перехода к относительным единицам имеет вид
|
|
|
|
|
|
|
y |
|
Y |
, |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
Yб |
|
|
|
|
Т |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
где Y – значение физической величины (параметра, переменной и |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Н |
|
т.п.) в исходной системе единиц, например, в системе единиц СИУ; |
|||||||||||||||||
|
Yб – базисное (базовое) значение физической величины, выра- |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Б |
|
женное в той же системе единиц и принятое в качестве единицы |
|||||||||||||||||
измерения величины Y в системе относительных единиц. |
|
||||||||||||||||
Основными базисными единицами электрических величин при |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
й |
|
|
разработке моделей в SimPowerSystems выбраны две независимые |
|||||||||||||||||
величины: |
|
|
|
|
|
|
|
и |
|
|
|||||||
– Pб – базисная мощность, равная номинальной активной мощ- |
|||||||||||||||||
ности устройства (Pн); |
р |
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
||||||||
– Uб – базисное |
напряжение, |
|
авное номинальному |
действую- |
|||||||||||||
|
|
|
|
|
|
оP |
|
|
|
|
|
||||||
щему значению напряжения питания устройства (Uн). |
|
||||||||||||||||
Все остальные электрические базисные единицы определяются |
|||||||||||||||||
|
|
|
|
|
|
т |
|
|
|
Uб |
|
|
|
||||
через эти две единицы. Например, базисный электрический ток: |
|||||||||||||||||
|
|
|
|
тивление |
I |
|
|
|
б |
|
|
|
|
|
|||
|
|
|
з |
|
|
б |
|
|
|
|
|
|
|
|
|
||
|
|
о |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
базисн е с пр |
|
: |
|
|
|
|
|
|
|
|
|
|
|
||||
|
п |
|
|
|
|
|
|
|
Uб |
2 |
|
|
|
|
|||
е |
|
|
|
|
|
Rб |
|
|
|
|
|
|
. |
|
|
||
|
|
|
|
|
|
|
|
Pб |
|
|
|
|
|||||
Р |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Для ц пей переменного тока должна задаваться базисная часто- |
|||||||||||||||||
та fб, равная, как |
|
правило, |
|
номинальной частоте |
питающего |
||||||||||||
напряжения fн. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Для асинхронной электрической машины дополнительно задаются: |
|||||||||||||||||
–Ωб – базисная угловая скорость;
–Мб – базисный момент:
6

|
|
|
|
|
M |
|
|
Pб |
. |
|
|
|
|
|
|
|
|
|
|
б |
|
|
|
|
|
||||
|
|
|
|
|
|
|
б |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
Вместо момента инерции, при задании параметров машины в от- |
|||||||||||||
носительных единицах, используется инерционная постоянная |
||||||||||||||
|
|
|
|
|
|
1 |
J 2 |
|
|
|
У |
|||
|
|
|
|
H |
|
2 |
|
1 |
, |
|
|
Т |
||
|
|
|
|
|
|
|
|
Pн |
|
|
|
|
||
где J – момент инерции; |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
Ω1 – угловая скорость вращения магнитного поля. |
|
||||||||||||
|
Инерционная постоянная выражается в секундах. Величина |
|||||||||||||
инерционной постоянной показывает, какое время |
Нвал электриче- |
|||||||||||||
|
|
|
|
|
|
|
|
|
малой |
|
|
|||
ской машины будет вращаться под действием запасенной кинетиче- |
||||||||||||||
ской энергии во вращающихся частях машиныБпри номинальной |
||||||||||||||
|
|
|
|
|
|
мощности |
|
|
|
|||||
нагрузке. Для машин большой |
|
|
|
|
|
значение этой постоянной |
||||||||
|
|
|
|
|
р |
|
|
|
|
|||||
лежит в пределах 3–5 с. Для маш |
|
|
|
|
мощности эта величина |
|||||||||
меньше: 0,5–0,7 с. |
о |
|
|
|
|
|
|
|
||||||
|
Рассмотрим основные |
азделы |
библиотеки SimPowerSystems |
|||||||||||
и входящие в них блоки. |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
тока |
|
|
|
|
|
|
|
|
|
|
||
1.2. Измерительные к н р льные устройства Measurements |
||||||||||||||
|
Блок «И мер тель |
|
» |
(Current Measurement) выполняет |
||||||||||
измерение мгновенного значения тока, протекающего через соеди- |
||||||||||||||
|
|
о |
|
|
|
|
|
|
|
|
|
|
|
|
нительную линиюи(провод). Выходным сигналом блока является |
||||||||||||||
|
п |
|
|
|
|
|
|
|
|
|
|
|
|
|
обычный сигналзSimulink, который может использоваться любым S- |
||||||||||||||
блоком. Внешний вид блока представлен на рис. 1.1. |
|
|
||||||||||||
е |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Р |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 1.1. Внешний вид блока «Измеритель тока» (Current Measurement)
7

В версии Matlab 5.3 параметры настройки отсутствуют. В более поздних версиях имеются параметры настройки.
|
|
|
|
|
Параметры настройки блока |
|
|
|||||
|
Output signal (выходной сигнал) – вид выходного сигнала бло- |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
У |
ка. Выбор значения параметра возможен только, если с помощью |
||||||||||||
блока Powergui установлен режим расчета на переменном токе |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
Т |
|
(Phasor simulation). В этом случае значение параметра выбирается |
||||||||||||
из списка: |
|
|
|
|
|
|
|
|
|
|
||
|
– Magnitude – амплитуда (скалярный сигнал); |
|
|
|||||||||
|
– Complex – комплексный сигнал; |
|
Б |
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
– Real-Imag – вектор, состоящий из двух элементов – действи- |
|||||||||||
тельной и мнимой составляющих сигнала; |
|
|
|
|||||||||
|
– Magnitude-Angle – вектор, состоящий из двух элементовН |
– ам- |
||||||||||
плитуды и аргумента сигнала. |
|
й |
|
|
||||||||
|
|
|
|
|
|
|
|
ис |
|
|
|
|
|
Блок «Измеритель напряжен я» (Voltage Measurement) выпол- |
|||||||||||
|
|
|
|
|
|
|
р |
|
|
|
|
|
няет измерение мгновенного значен я напряжения между двумя уз- |
||||||||||||
лами схемы. Параметры наст ойки аналог чны предыдущему блоку. |
||||||||||||
|
|
|
|
|
|
о |
|
|
|
|
|
|
Внешний вид блока представлен на |
. 1.2. |
|
|
|
||||||||
|
|
|
|
|
т |
|
|
|
|
|
|
|
|
|
|
|
и |
|
|
|
|
|
|
|
|
|
|
|
з |
|
|
|
|
|
|
|
|
|
|
|
о |
|
|
|
|
|
|
|
|
|
|
|
п |
|
|
|
|
|
|
|
|
|
|
|
Рис. 1.2. Внешний вид блока «Измеритель напряжения» (Voltage Measurement) |
||||||||||||
е |
|
|
|
|
|
|
|
|
|
|
|
|
Р |
|
1.3. Электротехнические элементы Elements |
|
|
||||||||
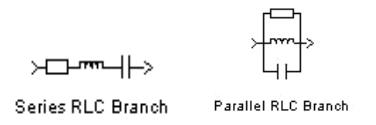
Блоки «Последовательная и параллельная RLC-цепь» (Series
RLC Branch, Parallel RLC Branch) моделируют последовательное или параллельное включение резистора, индуктивности и конденсатора. Внешний вид блоков представлен на рис. 1.3.
8
|
|
|
|
|
У |
|
|
|
|
Т |
|
|
|
|
Н |
|
|
Рис. 1.3. Внешний вид блоков «Последовательная и параллельная RLC-цепь» |
|||||
(Series RLC Branch, Parallel RLC Branch) |
|
|
|
||
|
|
Б |
|
|
|
Параметры настройки блоков |
|
|
|
||
1. Resistance R (Ohm) (сопротивление (Ом)) – величина активно- |
|||||
|
й |
|
|
|
|
го сопротивления. Для исключения резистора из последовательной |
|||||
цепи значение сопротивления нужно задать равным нулю. В этом |
|||||
и |
|
|
|
|
|
случае на пиктограмме блока резистор отображаться не будет. Для |
|||||
исключения сопротивления из параллельной цепи значение сопро- |
|||||
р |
|
|
|
|
|
тивления нужно задать равным inf (бесконечность). |
|
|
|
||
2. Inductance L (H) (индуктивность (Гн)) – величина индуктивно- |
|||||
сти. Для исключения индуктивн сти из последовательной цепи ее |
|||
величину нужно задать равн й нулю. В этом случае на пиктограмме |
|||
блока индуктивность о бража ься не будет. Для исключения индук- |
|||
тивности из параллельнойоцепи значение параметра нужно задать |
|||
равным inf (бесконечнос ь). |
|||
|
|
|
т |
|
3. Capacitance C (F) (емкость (Ф)) – величина емкости. Для ис- |
||
ключения конденсатора из последовательной цепи значение емко- |
|||
сти нужно |
|
и |
|
адать равным inf (бесконечность). В этом случае кон- |
|||
денсат р на |
з |
||
икт грамме блока показан не будет. Для исключения |
|||
|
из |
араллельной цепи значение параметра нужно задать |
|
|
о |
|
|
равным нулю. |
|
||
|
п |
|
|
|
Блоки «Последовательная и параллельная RLC-нагрузка» |
||
емкости(Series RLC Load, Parallel RLC Load) моделируют последовательное |
|||
и параллельное включение резистора, индуктивности и конденсатора. |
|||
Параметры цепи задаются через мощности цепи при номинальном |
|||
Р |
|
|
|
напряжении и частоте. Внешний вид блоков представлен на рис. 1.4.
9

Рис. 1.4. Внешний вид блоков «Последовательная и параллельная RLC-нагрузка»
|
|
|
|
(Series RLC Load, Parallel RLC Load) |
|
|
У |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Параметры настройки блоков |
|
Т |
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
1. Nominal voltage Vn (Vrms) (номинальное напряжение (В)) – |
||||||||||||||||||||||||||
значение действующего напряжения цепи, для которого определены |
|||||||||||||||||||||||||||
мощности элементов. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Н |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
2. Nominal frequency fn (Hz) (номинальная частота (Гц)) – значе- |
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Б |
|
|
|||
ние частоты, для которого определены мощности элементов. |
|
||||||||||||||||||||||||||
|
3. Active power P (W) (активная мощность (Вт)). |
|
|
|
|||||||||||||||||||||||
|
4. Inductive reactive power QL (positiveйvar) (реактивная мощность |
||||||||||||||||||||||||||
индуктивности (ВАр)) – |
|
|
|
|
ебляемая |
ндуктивностью реактивная |
|||||||||||||||||||||
мощность. |
|
|
|
|
|
|
|
|
|
|
|
|
|
и |
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
5. Capacitive reactive power QC |
(negative var) (реактивная мощ- |
|||||||||||||||||||||||||
ность емкости (ВАр)) – |
|
|
|
р |
конденсатором реактивная |
||||||||||||||||||||||
|
|
даваемая |
|||||||||||||||||||||||||
мощность. В графе |
|
|
|
|
ся абсолютное значение мощности (без |
||||||||||||||||||||||
учета знака). |
|
|
|
|
пот |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
т |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
Величины мощностей при последовательном подключении мо- |
||||||||||||||||||||||||||
|
|
|
|
вводи |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
гут быть пределены по следующим выражениям: |
|
|
|
||||||||||||||||||||||||
|
|
|
з |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
о |
|
|
|
|
|
|
|
|
|
|
|
|
|
U 2 |
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 ; |
|
|
|
||||
|
п |
|
|
P |
R |
|
2 |
|
|
|
|
1 |
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
R |
|
|
|
|
|
|
|
|
ω L |
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
е |
|
|
|
|
|
|
|
|
|
|
|
|
ω |
C |
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Р |
|
|
|
QL ω L |
|
|
|
|
|
|
|
U 2 |
|
|
|
; |
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
2 |
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
R |
|
|
|
|
|
|
|
ω L |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ω C |
|
|
|
|
|
|
|
||||
10