

diplom[ishodniki] / До Мигдалёнка / Основной текст
.pdfЭквивалентная постоянная времени статора Тэ (с)
|
|
|
|
|
|
Т |
э |
|
|
Lэ |
. |
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
Rэ |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
У |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
R' |
|
|
|
|
|
|
|
|
|
||
|
Эквивалентная постоянная времени ротора Т2 |
(с) |
Т |
|||||||||||||||||||||
|
|
|
|
|
|
T |
L2 |
. |
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
Н |
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
Б |
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
Коэффициент, связывающий момент двигателя с током и потоком: |
|||||||||||||||||||||||
|
|
|
|
|
K |
|
|
|
3 |
p |
|
|
L12 |
. |
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
M |
|
|
|
|
|
|
|
|
П |
й |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
L |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
и |
|
|
|
|
|||||||||
|
Параметры управляющего устройства рассчитываются исходя из |
|||||||||||||||||||||||
следующих выражений. |
о |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
Коэффициент обратной связи по току |
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
т |
|
|
|
U |
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
рзт max |
|
|
|
|
|
|
||||||||||||
|
|
|
и |
K |
|
|
|
|
|
|
|
|
|
|
|
, |
|
|
|
|
|
|||
|
|
|
|
i Iном |
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
з |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
где Uзт max – макс мальное значение напряжения задания тока, Uзт max = |
||||||||||||||||||||||||
= 10 В; |
о |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
λi – к эффициент максимального тока, λi = 1,5–2; |
|
|
|||||||||||||||||||||
|
Iном – н минальный ток двигателя. |
|
|
|
|
|
|
|
|
|||||||||||||||
е |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Р |
Коэффициент братной связи по скорости |
|
|
|
|
|||||||||||||||||||
п |
|
|
Kоc |
|
Uзс max |
, |
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
ωном |
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
где Uзс max – максимальное значение напряжения задания скорости,
Uзс max = 10 В;
ном – номинальное значение угловой скорости ротора.
71

Коэффициент обратной связи по потокосцеплению ротора
Uзп max
Kоп 2 ,
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
У |
где Uзп max – максимальное значение напряжения задания потокос- |
|||||||||||||||||||||||||
цепления ротора, Uзп max = 10 В; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
2 – потокосцепление ротора: |
|
|
|
|
|
|
|
|
|
|
|
Н |
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
2 R |
|
М |
н |
|
|
|
|
|
|
Т |
|||||
|
|
|
|
|
|
2 |
|
|
|
2 |
|
|
|
, |
|
|
|
|
|
||||||
|
|
|
|
|
|
|
3 ω р2 |
|
Б |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
2н |
|
|
п |
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
2н = 0 ном · Sн, |
|
|
|
|
|
|
|
|
|||||||||||
где 0 ном – номинальное значение скорости холостого хода двигателя; |
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
скольжения |
|
|
|
|
|
|
|
|||||||||
|
Sн – номинальное значение |
|
|
|
|
|
|
|
|
|
; |
|
|
|
|
|
|
|
|||||||
|
Мн – номинальный момент дв гателя. |
|
|
|
|
p |
|
|
|
||||||||||||||||
|
|
|
|
|
x |
|
|
ртy |
|
2 K β |
|
|
|
|
|||||||||||
|
Передаточные функции регуляторовймеют следующий вид [6]. |
||||||||||||||||||||||||
|
Регуляторы тока |
|
|
о |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
Rэ (Tэ p 1) |
|
|
|
||||||||||||
|
|
|
|
рт |
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
W ( p) W ( p) |
|
|
|
|
|
|
|
, |
|
|
||||||||||||
|
|
з |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
от |
|
п |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
регулятор потокосцепления ротора |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
о |
иW ( p) |
|
Kот (T2 p 1) |
, |
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
рп |
|
|
|
|
4 Kоп L12 p |
|
|
|
|
|
|
|
|||||||
е |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Р |
регулятор скорости |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
п |
|
Wрс |
( p) |
1 8 p |
|
|
J Kот |
|
|
, |
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
8 |
|
p |
|
|
4 Kм Kос |
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
где – малая постоянная времени;п – коэффициент усиления преобразователя;
JΣ – суммарный момент инерции электропривода.
72

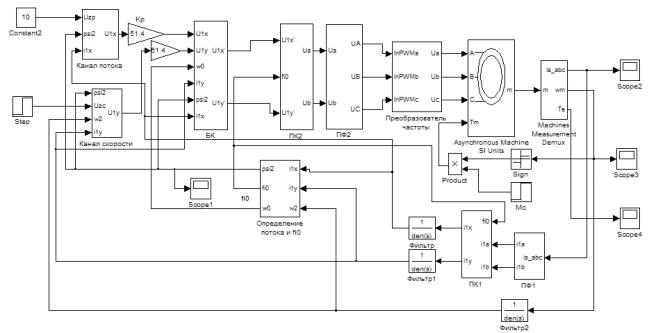
Для моделирования данной системы электропривода может использоваться рассмотренная структурная схема. Однако полученные результаты будут приближенно отражать электромагнитные
схема модели представлена на рис. 3.10.
переходные процессы в электроприводе. Для наиболее полного исследования переходных процессов в асинхронном электроприводе при векторном управлении необходимо использовать модельУ, составленную на основании функциональной схемы векторного управления асинхронным двигателем (см. рис. 3.8). СтруктурнаяТ
В качестве модели асинхронного двигателя используется стандарт-
ный блок «Асинхронная машина» Asynchronous Machine SI Units.
|
Для преобразования переменных из трехфазной системы коорди- |
|||||||||||||||||
нат в двухфазную, а также для преобразования из неподвижной си- |
||||||||||||||||||
стемы координат во вращающуюся и наоборот используютсяНпреоб- |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
й |
||||
разователи фаз и координат (ПК1, ПК2, ПФ1, ПФ2). |
||||||||||||||||||
|
Для преобразования токов статора трехфазногоБАД в токи эквива- |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
и1 1 |
|
||||||||
лентного двухфазного АД используется преобразователь фаз ПФ1. |
||||||||||||||||||
|
|
|
|
р |
|
|
|
|
|
|||||||||
Преобразования выполняются в соответств |
с выражениями: |
|||||||||||||||||
|
|
|
о |
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
i1α kc (i1a |
|
|
|
i1b |
|
|
|
i1c ); |
|||||||
|
|
|
|
|
|
|
|
|
2 |
|
|
|
2 |
|
|
|||
|
|
|
i |
k |
|
|
|
|
3 |
(i |
|
i ); |
||||||
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
и |
|
c |
|
|
|
|
|
|
|
1b |
|
1c |
|||
|
|
|
1β |
|
|
|
|
2 |
|
|
|
|
||||||
|
|
|
т kc |
2 |
. |
|
|
|
|
|
||||||||
|
|
о |
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
||
|
п |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
Пре браз звание из неподвижной системы координат во вра- |
|||||||||||||||||
щающуюся систему координат (преобразователь координат ПК1) |
||||||||||||||||||
е |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
вы олня тся в соответствии с выражениями: |
|
|||||||||||||||||
Р |
|
|
i1x i1α cos 0 |
i1β |
sin 0; |
|||||||||||||
|
|
|
||||||||||||||||
|
|
|
i1y i1α sin 0 |
i1β cos 0. |
||||||||||||||
73
|
|
|
|
|
|
|
|
|
|
|
|
У |
|
|
|
|
|
|
|
|
|
|
|
Т |
|
|
|
|
|
|
|
|
|
|
|
Н |
|
|
|
|
|
|
|
|
|
|
|
|
Б |
|
|
|
|
|
|
|
|
|
|
|
й |
|
|
|
|
|
|
|
|
|
|
|
и |
|
|
|
|
|
|
|
|
|
|
|
р |
|
|
|
|
|
|
|
|
|
|
|
о |
|
|
|
|
|
|
|
|
|
|
|
т |
|
|
|
|
|
|
|
|
|
|
|
и |
|
|
|
|
|
|
|
|
|
|
|
з |
|
|
|
|
|
|
|
|
|
|
|
о |
|
|
|
|
|
|
|
|
|
|
|
п |
|
|
|
|
|
|
|
|
|
|
|
Рис. 3.10. Структурная схема модели асинхронного электропривода с векторным управлением |
||||||||||||
е |
|
|
|
|
|
|
|
|
|
|
|
|
Р |
|
|
|
|
|
|
|
|
|
|
|
|

Обратные преобразования выполняются в соответствии с выражениями:
– преобразователь координат ПК2:
U1α U1x ' cos 0 U1y ' sin 0 ;
(8)
U1β U1x ' sin 0 U1y ' cos 0 ;
|
– преобразователь фаз ПФ2: |
|
|
|
|
|
|
|
|
|
|
Н |
У |
||||||||||
|
|
|
|
|
|
|
|
U1a |
U1α ; |
|
|
|
Б |
Т |
|||||||||
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
3 |
|
|
|
|
||
|
|
|
|
|
U1b |
U1α |
|
|
|
U1β ; |
|
(9) |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
й |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
и |
|
|
|
|||||||
|
|
|
|
|
U1c |
|
1 |
U1α |
|
|
3 |
|
U1β . |
|
|
||||||||
|
|
|
|
|
2 |
|
|
2 |
|
|
|
|
|||||||||||
|
|
|
|
|
|
о |
|
|
|
|
|
|
|
|
|
|
|
||||||
|
Блок компенсации (БК) к мпенси ует перекрестные обратные |
||||||||||||||||||||||
связи асинхронного двига еляр. К мпенсирующие напряжения опре- |
|||||||||||||||||||||||
|
|
|
|
ний |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
деляются из выраже |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
з |
U |
ω |
0 |
σ L i |
|
|
|
; |
|
|
||||||||||
|
|
|
|
|
тkx |
|
|
|
|
|
|
1 |
1y |
|
|
|
|||||||
е |
о |
|
Uky ω0 (L1σ i1x 2 x ); |
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
L122 |
|
|
|
|
|
|
|
|
|
|||||
Р |
п |
|
|
|
|
1 |
L L |
. |
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
2 |
|
|
|
|
|
|
|
||
Выходные напряжения блока компенсации равны |
|
|
|||||||||||||||||||||
|
|
|
|
|
U |
' |
U |
1x |
U |
kx |
; |
|
|
|
|
||||||||
|
|
|
|
|
|
|
1x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
U |
' |
|
U |
1y |
U |
ky |
. |
|
|
|
|
||||||
|
|
|
|
|
|
|
1y |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
75
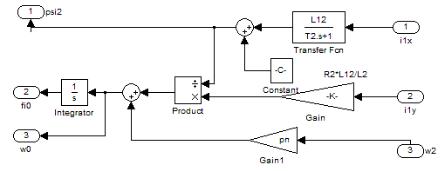
Для определения проекции вектора потокосцепления ротора 2х используется выражение
2x |
L12 |
i1x |
|
T p 1 |
|
||
2 |
|
|
|
Синхронная электрическая |
угловая |
скорость |
определяется из |
||||||||
|
|
|
|
|
|
|
|
|
|
|
Т |
выражения |
|
|
|
|
|
|
|
|
|
|
У |
|
|
|
|
|
|
L R' |
|
1 |
|
|
|
ω |
0 |
ω |
2 |
p |
|
12 2 |
|
|
i |
. |
|
|
|
|
|||||||||
|
|
п |
|
L2 |
|
2x |
1y |
|
|
||
|
|
|
|
|
|
|
|
|
|
||
|
Для определения угла поворота системы координат значение |
||||||||
синхронной электрической угловой скорости интегрируетсяН. |
|||||||||
|
Структурная схема подсистемы определения потока и угла пово- |
||||||||
рота осей системы координат представлена на рисБ. 3.11. |
|||||||||
|
|
|
|
|
|
|
|
|
й |
|
|
|
|
|
|
|
|
и |
|
|
|
|
|
|
|
|
р |
|
|
|
|
|
|
|
|
о |
|
|
|
|
|
|
|
|
т |
|
|
|
|
|
|
|
|
и |
|
|
|
|
|
|
|
|
з |
|
|
|
|
|
|
|
Рис. 3.11. Структурная схема подсистемы определения потокосцепления |
||||||||
|
|
о |
и угла поворота осей системы координат |
||||||
|
|
|
|
|
|
|
|
||
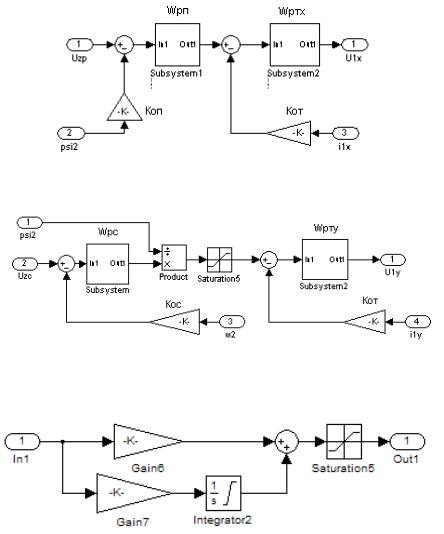
|
Структурные схемы подсистем «Канал потока» и «Канал скоро- |
||||||||
|
п |
|
|
|
|
|
|
|
|
сти» пр дставлены на рис. 3.12–3.13. Для реализации регуляторов |
|||||||||
используются детализированные структурные схемы (рис. 3.14). |
|||||||||
е |
|
|
|
|
|
|
|
|
|
|
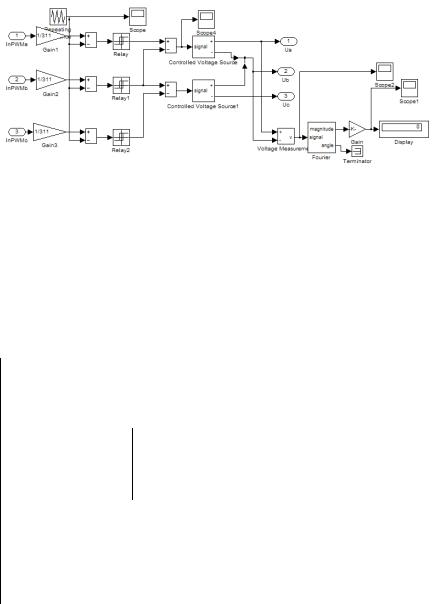
Преобразователь частоты можно реализовать структурной схе- |
||||||||
мой, представленной на рис. 3.15. Кроме этого может использовать- |
|||||||||
Р |
|
|
|
|
|
|
|
|
|
ся структурная схема с использованием блока «Универсальный мост» (см. рис. 1.45).
76
|
|
|
|
|
|
|
|
|
Н |
У |
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 3.12. Структурная схема подсистемы «Канал потока» Т |
||||||||
|
|
|
|
|
|
|
|
|
Б |
|
|
|
|
|
|
|
|
|
й |
|
|
|
|
|
|
|
|
|
и |
|
|
|
|
|
|
|
|
|
р |
|
|
|
|
|
|
|
|
|
о |
|
|
|
|
|
|
|
|
|
|
т |
|
|
|
|
|
|
|
|
|
и |
|
|
|
|
|
|
|
|
Рис. 3.13. С рук урная схема п дсистемы «Канал скорости» |
|
|||||||
|
|
|
з |
|
|
|
|
|
|
|
|
|
о |
|
|
|
|
|
|
|
|
|
п |
|
|
|
|
|
|
|
|
|
е |
|
|
|
|
|
|
|
|
|
|
Р |
|
Рис. 3.14. Детализированная структурная схема ПИ-регулятора |
|
|||||||
|
|
|
||||||||
77
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
У |
|
|
|
|
|
|
Рис. 3.15. Структурная схема преобразователя частоты |
Т |
||||||||||
|
Рассмотрим пример моделирования асинхронногоНэлектропри- |
|||||||||||||||
|
вода с векторным управлением. |
|
й |
|
|
|
||||||||||
|
Пример. |
Разработать структурную схему Бмодели САУ скоро- |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
и |
|
|
|
||
|
стью |
для асинхронного двигателя 4A160S2У3 при векторном |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
р |
|
|
|
|
|
|
|
управлении. Параметры двигателя представлены в табл. 3.1. |
|||||||||||||||
|
|
|
|
|
|
|
|
|
о |
|
|
|
Таблица 3.1 |
|||
|
|
|
|
|
|
|
Технические данные |
параметры |
|
|
||||||
|
|
|
|
|
|
схемы замещения двигателя 4A160S2У3 |
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
т |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Параме р |
|
|
|
|
Значение |
|
||||
|
Рн, кВт |
|
|
|
|
|
|
|
|
15 |
|
|
||||
|
Uф. ном, В |
|
|
|
|
|
|
|
|
220 |
|
|
||||
|
f, Гц |
|
|
|
|
з |
|
|
|
|
|
|
50 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
о |
|
R1* |
|
|
|
|
0,052 |
|
|
||
|
Cтат |
|
р |
|
|
и |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
0,092 |
|
|
|||
|
|
|
|
|
|
|
|
X1* |
|
|
|
|
|
|
||
|
Ротор |
|
|
|
|
|
R2* |
|
|
|
|
0,022 |
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
е |
|
|
|
|
X2* |
|
|
|
|
0,124 |
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
Xμ* |
|
|
|
|
|
|
|
|
|
|
|
|
4 |
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
0,048 |
|
|
|
|
J, кгп·м |
|
|
|
|
|
|
|
|
|
|
|||||
|
рп |
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
ηном, о.е. |
|
|
|
|
|
|
|
|
0,88 |
|
|
||||
|
Sном |
|
|
|
|
|
|
|
|
|
|
|
|
0,023 |
|
|
Р |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
cosφн |
|
|
|
|
|
|
|
|
|
|
|
|
0,91 |
|
|
Определим параметры структурной схемы (см. рис. 3.9).
78
Номинальный ток статора
I1н |
|
Pн |
|
|
15000 |
|
28,38 А. |
|
|
|
|
|
|||
|
U1фн н cos |
|
220 0,88 0,91 |
||||
3 |
3 |
|
|||||
|
Номинальная скорость двигателя |
|
|
|
|
|
|
|
У |
|||||||||||||||||||||||||||||
|
ω n |
(1 S |
|
) |
3,14 3000 |
(1 |
0,023) |
|
Т |
|||||||||||||||||||||||||||||
|
н |
30 |
|
|
|
|
|
|
|
н |
|
|
|
|
|
|
|
|
|
|
|
30 |
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Н |
|
|||||||
|
Номинальный момент двигателя |
|
|
|
|
|
|
|||||||||||||||||||||||||||||||
|
|
|
|
|
Б |
|
|
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рн |
|
|
|
|
|
15000 |
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
М |
н |
|
|
|
|
48,9 |
Н м. |
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
ωн |
|
|
306,8 |
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
й |
|
|
|
|||||||||||||||||
|
Номинальное сопротивление |
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||
|
|
и |
|
|
|
|
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
U1фн |
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
R |
|
|
|
|
|
|
|
|
220 |
|
|
7,75 Ом. |
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
ном |
|
|
|
|
|
I1н |
|
|
|
|
|
|
28,38 |
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
р |
|
|
|
|
|
|
|
|
|||||||||
|
Сопротивления в абсолютных значен ях: |
|
|
|
||||||||||||||||||||||||||||||||||
|
|
|
|
|
R* |
|
|
о |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
R |
R |
|
|
|
7,75 0,052 |
0,403 Ом; |
|
|
||||||||||||||||||||||||||||
|
|
|
|
1 |
|
|
т |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
1 |
|
|
|
н м |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
R/ |
R/* |
R |
|
|
|
|
7,75 0,022 0,171 Ом; |
|
|
|||||||||||||||||||||||||||
|
|
и |
* |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
2 |
|
|
|
2 |
|
|
|
|
н м |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
X |
|
X * |
R |
|
|
|
|
7,75 0,092 0,713 Ом; |
|
|
||||||||||||||||||||||||||
|
|
з |
|
1 |
|
|
|
|
ном |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
X |
/ |
X |
/* |
R |
|
|
|
7,75 0,12 0,93 Ом; |
|
|
|||||||||||||||||||||||||
|
|
|
|
|
2 |
|
|
|
|
|
2 |
|
|
|
|
ном |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
X X Rном 7,75 4 31 Ом. |
|
|
|
|||||||||||||||||||||||||||||
|
Индуктивн сти рассеивания статора и ротора и индуктивность |
|||||||||||||||||||||||||||||||||||||
е |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
взаимоиндукциио: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Р |
п |
|
|
L1δ |
|
|
|
X1 |
|
|
|
|
|
|
|
0,713 |
|
0,0023 Гн; |
|
|
||||||||||||||||||
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
f |
|
|
2 |
3,14 50 |
|
|
|
|
||||||||||||||||||||
|
|
|
L2δ |
|
|
|
|
X / 2 |
|
|
|
|
|
|
|
|
0,93 |
|
|
|
0,00296 Гн; |
|
|
|||||||||||||||
|
|
|
2 |
|
f |
|
2 3,14 50 |
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
Lμ |
|
|
|
|
X |
|
|
|
|
|
|
|
31 |
|
|
|
0,1 Гн. |
|
|
|||||||||||||
|
|
|
|
|
|
|
2 |
f |
|
|
|
2 3,14 50 |
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
79
Индуктивности статора и ротора:
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
L12 0,1 Гн; |
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
L1 L1 L12 |
0,101 Гн; |
|
|
У |
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
L2 L2 L12 |
0,102 Гн. |
|
|
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
Т |
|||||||||||||||||||||||||||||||||||
|
Эквивалентное сопротивление и индуктивность: |
|||||||||||||||||||||||||||||||||||||||||||
|
|
|
||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
' |
|
|
|
|
L122 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0,12 |
|
|
|
|
||||||
|
Rэ R1 R2 |
|
|
|
|
|
|
|
|
|
|
|
0,403 0,171 |
|
|
|
|
0,564 Ом; |
|
|||||||||||||||||||||||||
|
|
|
L22 |
|
0,1022 |
|
||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
L L |
L122 |
|
0,101 |
0,12 |
|
Б |
|
|
||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
0,0051 Гн. |
|
|
|||||||||||||||||||||||||||||||
|
|
|
э |
|
1 |
|
|
|
|
|
L2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
0,102 |
|
|
|
|
Н |
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
Постоянные времени: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
Т |
|
|
|
|
Lэ |
|
|
|
0,0051 |
0,0091 с; |
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
э |
|
|
|
|
|
Rэ |
|
|
р |
й |
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0,564 |
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
L |
|
|
|
|
|
0,102и |
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
Т |
2 |
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
0,596 с. |
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R2 |
|
|
0,171 |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
и |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
Потокосцепление ро |
|
ора |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
з |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
2н = |
т0 ном · Sн = 314 · 0,023 = 7,22 с-1; |
|
|
||||||||||||||||||||||||||||||||||||||
|
о |
|
|
2 |
|
2 |
0,171 48,9 |
0,877 Вб. |
|
|
||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
е |
|
|
|
|
|
|
|
|
3 1 7,22 |
|
|
|
|
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
Коэффициент, связывающий момент двигателя с током и потоком: |
|||||||||||||||||||||||||||||||||||||||||||
Р |
пK |
|
|
|
|
M |
|
|
|
|
|
3 |
p |
L12 |
|
|
|
|
3 1 0,1 |
1,456. |
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
M |
|
i |
|
|
|
|
2 |
|
|
|
L |
|
|
|
2 0,102 |
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
1y |
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
Коэффициент обратной связи по току ( i = 2) |
|
|
|||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
Kот |
Uзт |
max |
|
10 |
|
|
|
0,176. |
|
|
|||||||||||||||||||||||||||||
|
|
|
|
|
|
i I |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ном |
|
|
|
|
2 28,38 |
|
|
|
|
|
||||||||||||||||||||
80