

diplom[ishodniki] / До Мигдалёнка / Основной текст
.pdfКоэффициент обратной связи по скорости
Uзс max 10
Kос ωном 306,8 0,033.
Коэффициент обратной связи по потоку |
|
|
|
|
|
|
|
|
У |
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
Kоп |
|
Uзп |
max |
|
|
|
|
10 |
|
11,4. |
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
0,877 |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
Передаточные функции регуляторов имеют следующий вид. |
|
|
|
|
||||||||||||||||||||||||||||||||||||
Регулятор тока |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Б |
|
|
Т |
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
Rэ (Tэ p 1) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
W |
( p) W |
( p) |
|
|
|
0,0091р 1 |
0,283 31,15 |
1 |
, |
|
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
ртx |
|
|
|
ртy |
|
|
|
|
|
2 Kот п p |
|
|
|
|
|
0,0321р |
Н |
|
р |
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
регулятор потока |
|
|
|
|
|
|
|
|
|
|
и |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
р |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
Kот (T2 p 1) |
|
0,596р 1 |
|
|
|
1 |
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
Wрп ( p) |
4 Kоп L12 p |
|
|
|
|
|
|
|
|
|
|
й23,28 39 |
|
|
, |
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
0,0256р |
|
|
|
р |
|
|
|
|
|
|
|
||||||||||||||||||
регулятор скорости |
|
|
о |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
т |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Wрс |
( p) |
1 8 p |
|
|
|
J K |
|
т |
|
|
1 0,008p |
|
72,73 9091 |
1 |
, |
|
|
|
|
|||||||||||||||||||||
8 p |
|
4 KМ Kос |
|
0,00011p |
р |
|
|
|
|
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
где – малая постоянная времени, = 0,001 с; |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
п – к |
эффициентиусиления преобразователя, п = 51,4; |
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||
п |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
J |
|
– суммарный момент инерции электропривода, J |
|
= 1,7 · J |
д |
= |
||||||||||||||||||||||||||||||||||
|
|
|
|
з |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
= 1,7 · 0,038 = 0,0816 кг·м2. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
е |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Структурнаяосхема модели электропривода будет соответство- |
||||||||||||||||||||||||||||||||||||||||
вать структурной схеме, представленной на рис. 3.10. Параметры |
||||||||||||||||||||||||||||||||||||||||
Р |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
настройки |
|
блока |
|
«Асинхронный |
|
|
|
двигатель» |
представлены |
|
на |
|||||||||||||||||||||||||||||
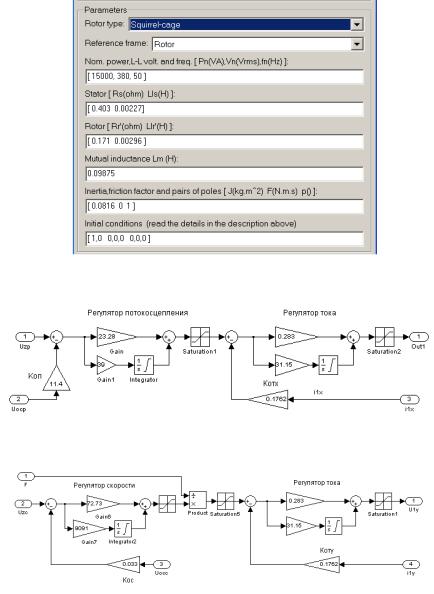
рис. 3.16. Структурные схемы подсистем с параметрами настройки представлены на рис. 3.17–3.20. В качестве фильтров необходимо использовать апериодические звенья первого порядка с малыми постоянными времени. Преобразователь частоты реализован по структурной схеме, представленной на рис. 3.15. Частота широтноимпульсного преобразователя составляет 4 кГц.
81
|
|
|
|
|
|
|
|
|
|
У |
|
|
|
|
|
|
|
|
|
Т |
|
|
|
|
|
|
|
|
|
Н |
|
|
|
|
|
|
|
|
|
|
Б |
|
|
|
|
|
|
|
|
|
й |
|
|
|
|
|
|
|
|
|
и |
|
|
|
|
|
Рис. 3.16. Окно настройки параметров блока «Ас нхронный двигатель» |
|||||||||
|
|
|
|
|
р |
|
|
|
|
|
|
|
|
|
о |
|
|
|
|
|
|
|
|
|
з |
т |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
о |
|
|
|
|
|
|
|
|
|
|
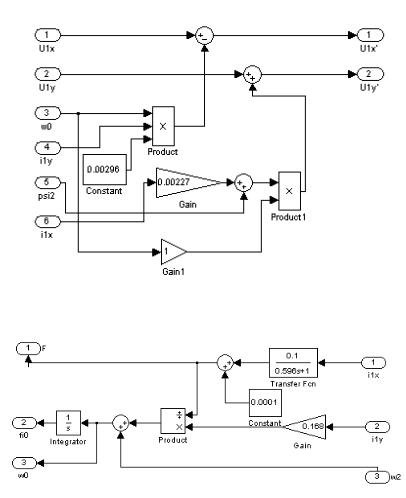
Рис. 3.1и7. Структурная схема подсистемы «Канал потока» |
|
|
||||||
|
п |
|
|
|
|
|
|
|
|
|
е |
|
|
|
|
|
|
|
|
|
|
Р |
|
|
|
|
|
|
|
|
|
|
Рис. 3.18. Структурная схема подсистемы «Канал скорости».
82
|
|
|
|
|
|
|
|
|
|
У |
|
|
|
|
|
|
|
|
|
Т |
|
|
|
|
|
|
|
|
|
Н |
|
|
|
|
|
|
|
|
|
|
Б |
|
|
|
|
|
|
|
|
|
й |
|
|
|
Рис. 3.19. Структурная схема подс стемы блока компенсации БК |
|
|||||||||
|
|
|
|
|
|
и |
|
|
|
|
|
|
|
|
|
р |
|
|
|
|
|
|
|
|
|
о |
|
|
|
|
|
|
|
|
|
т |
|
|
|
|
|
|
|
|
|
и |
|
|
|
|
|
|
|
|
|
з |
|
|
|
|
|
|
|
|
|
о |
|
|
|
|
|
|
|
|
|
|
Рис. 3.20. Структурная схема подсистемы определения потокосцепления |
||||||||||
п |
|
и угла поворота осей системы координат |
|
|
||||||
е |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
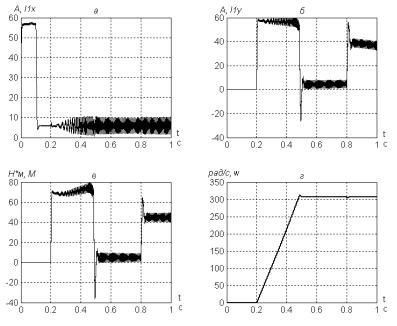
Моделировался разгон электропривода до номинальной скорости |
||||||||||
с моментом холостого хода Мхх = 5 Н·м с дальнейшим приложением |
||||||||||
Рноминального момента Мн = 48,9 Н·м. На рис. 3.21 представлены |
||||||||||
графики изменения проекций тока статора I1x, I1y, электромагнитного момента М и угловой скорости двигателя .
83
|
|
|
|
У |
|
|
|
Т |
|
|
|
Н |
|
|
|
|
Б |
|
|
|
й |
|
|
|
и |
|
|
|
|
Рис. 3.21. Графики перех дных п оцессов при пуске и набросе |
|
|||
нагрузки двига еля 4A160S2У3 векторном управлении |
|
|||
при |
|
|
|
|
3.3. Модел рованиесинхронного двигателя |
|
|
||
с постояннымитмагнитами при векторном управлении |
|
|||
Синхр нные двигатели с постоянными магнитами (СДПМ) нахо- |
||||
дят шир к е применение в современном электроприводе. Динамиче- |
||||
з |
|
|
|
|
ские казатели электропривода на базе СДПМ близки к показателям |
||||
с применением двигателей постоянного тока. |
|
|||
ривода |
|
|
|
|
Синхронный двигатель с постоянными магнитами представляет |
||||
собойпв нтильный двигатель (ВД) с непрерывным регулированием |
||||
Рэлектрополож ния результирующего вектора магнитодвижущей силы (МДС) статора относительно положения вращающегося ротора [5]. При этом по сигналам датчика положения ротора формируется требуемый алгоритм коммутации ключей преобразователя частоты, обеспечивающий заданное положение вектора МДС статора относительно вектора МДС ротора.
84
Для управления электрическими величинами СДПМ применяются векторные способы управления.
Система векторного управления СДПМ построена на основе преобразований координат. Так, мгновенные значения токов в фазах А, В и С преобразуются в значения токов эквивалентной двухфазной машины в неподвижных осях (α, β), затем в значения тока во вращаю-
щихся осях (q, d). Сформированные таким образом сигналы являются |
||||||||||||||||||||||||||||||||||||||||
сигналами обратных связей для соответствующих регуляторов тока. |
||||||||||||||||||||||||||||||||||||||||
Сигналы с регуляторов тока преобразуются при помощи обратных |
||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
У |
преобразований в систему координат αβ и используются для форми- |
||||||||||||||||||||||||||||||||||||||||
рования сигналов открывания ключей инвертора. |
|
Т |
||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
Поддержание составляющей тока статора по оси d равной нулю |
|||||||||||||||||||||||||||||||||||||||
необходимо для обеспечения оптимального режима работы двига- |
||||||||||||||||||||||||||||||||||||||||
теля, при котором развивается максимальный моментН. Регулятор |
||||||||||||||||||||||||||||||||||||||||
тока по оси q и регулятор скорости образуют систему подчиненного |
||||||||||||||||||||||||||||||||||||||||
управления, в которой сигнал с регулятора скоростиБявляется сиг- |
||||||||||||||||||||||||||||||||||||||||
налом задания тока. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
Функциональная схема системы |
векторного управления син- |
||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
й |
|
|
|
|
|
|
|
|
|
||||
хронным двигателем с постоянными магн тами представлена на |
||||||||||||||||||||||||||||||||||||||||
рис. 3.22. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
и |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
р |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
о |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
НВ |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
ЗИ |
|
|
|
|
|
|
|
|
РС |
т |
|
|
РТ |
|
|
ПК1 |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
iqr |
|
|
|
|
|
|
|
Uqr |
|
|
Uαr |
|
|
|
|
|
|
|
|
|
|
|
ωз |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
и |
|
|
|
|
|
|
|
|
dq |
|
|
СУИ |
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
- |
|
|
|
|
- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
АИН |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
з |
|
|
|
|
|
|
|
|
|
Udr |
αβ |
|
Uβr |
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
ωр |
|
|
idr = 0 |
- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
о |
|
|
|
|
|
|
|
|
|
iq |
|
|
|
|
iα |
|
|
ia |
|
|
|
||||||||||||||
|
пДУ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
id |
|
|
dq |
|
iβ |
αβ |
|
ib |
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
abc |
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
αβ |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
е |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ПК2 |
|
ПФ1 |
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Р |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
СДПМ
Θ
ДПР
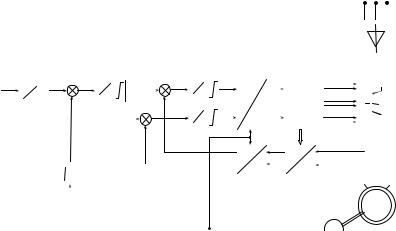
Рис. 3.22. Функциональная схема системы векторного управления синхронным двигателем с постоянными магнитами
85
На функциональной схеме введены следующие обозначения:
СДПМ – синхронный двигатель с постоянными магнитами; |
|
|||||||||||||||||||||
НВ – неуправляемый выпрямитель; |
|
|
|
|
|
|
|
|
||||||||||||||
АИН – автономный инвертор напряжения; |
|
|
|
|
||||||||||||||||||
ДПР – датчик положения ротора; |
|
|
|
|
|
|
|
|
У |
|||||||||||||
СУИ – система управления инвертором; |
|
|
|
|
||||||||||||||||||
|
|
|
|
|
||||||||||||||||||
ПФ1 – преобразователь фаз; |
|
|
|
|
|
|
|
|
|
|
Т |
|||||||||||
ПК1, ПК2 – преобразователи координат; |
|
|
|
|||||||||||||||||||
|
|
|
|
|
||||||||||||||||||
ДУ – дифференцирующее устройство; |
|
|
|
|
|
|
||||||||||||||||
РТ – регуляторы тока; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
РС – регулятор скорости; |
|
|
|
|
|
|
|
|
|
|
|
|
Б |
|
|
|||||||
ЗИ – задатчик интенсивности. |
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
Математическая модель электропривода с вентильным двигате- |
||||||||||||||||||||||
лем в осях d, q имеет следующий вид: |
|
|
|
|
|
Н |
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
d 1q |
|
й |
|
|
||||||||
|
U i R |
|
|
ω |
|
|
, |
|
|
|
||||||||||||
|
1m |
|
|
1q 1 |
|
|
|
|
|
и |
1d |
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
dt |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
р |
|
|
|
|
|
|
|
|
||||||
|
|
|
u |
2d |
i |
2d |
R |
|
d 2d , |
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
о |
|
dt |
|
|
|
|
|
|
(10) |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
M M J |
dω |
, |
|
M p i , |
|
|
|||||||||||||||
|
|
|
|
|
||||||||||||||||||
|
|
т |
|
|
|
|
|
|
|
|
п 1q |
1d |
|
|
|
|||||||
|
|
|
|
c |
|
|
dt |
|
|
|
|
|
|
|
|
|
|
|||||
|
и |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
1d L12i2d , |
|
1q |
|
L1qi1q , |
2d |
L2d i2d , |
|
|
|||||||||||||
|
з |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
где Ψ1d, Ψ1q – потокосцепления статора по осям d и q; |
|
|
||||||||||||||||||||
|
о |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i2d, Ψ2d – т к потокосцепление ротора по оси d; |
|
|
||||||||||||||||||||
i1d, i1q – т ки статора по осям d и q; |
|
|
|
|
|
|
|
|
||||||||||||||
R1, R2 – активные сопротивления обмоток статора и ротора; |
|
|||||||||||||||||||||
е |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
L1d, L1q – индуктивности обмоток статора по осям d и q; |
|
|||||||||||||||||||||
L2d – олная индуктивность обмотки ротора по оси d; |
|
|
||||||||||||||||||||
пL12 – наибольшее значение взаимной индуктивности обмоток |
||||||||||||||||||||||
статора и ротора; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
рп – число пар полюсов; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
М, Мс – электромагнитный и статический моменты; |
|
|
||||||||||||||||||||
РJ – момент инерции электропривода. |
|
|
|
|
|
|
||||||||||||||||
При симметричной магнитной системе ротора, что соответствует |
||||||||||||||||||||||
СД с постоянными магнитами, |
расположенными на поверхности |
|||||||||||||||||||||
86
ротора, L1d = L1q = L1. Если магнитный поток, создаваемый по продольной оси d постоянный, т.е. Ψ1d = L12i2d = Ψm = const, то СДПМ может быть описан в виде следующей системы уравнений:
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
di |
|
|
|
|
|
|
|
|
У |
|
|
|
|
U |
|
i |
|
R L |
|
1q |
|
e; |
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
1m |
1q |
1 |
|
|
|
1 |
dt |
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Т |
|||
|
|
|
|
e p |
|
Ψ |
m |
ω k |
ω; |
|
|
|
|||||||||||||
|
|
|
|
|
|
п |
|
|
|
|
|
|
|
|
|
|
|
|
|
Н |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(11) |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
M p Ψ |
|
|
i |
|
|
k i |
|
; |
Б |
|
|
||||||||||
|
|
|
|
|
|
п |
|
m 1q |
|
|
|
|
|
1q |
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dω |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
M M |
|
|
|
|
|
|
|
й |
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
c |
|
|
|
|
|
dt |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
и |
|
|
|
|
||||||||
|
В соответствии с системой |
|
|
|
|
|
|
|
|
|
|
|
|
(11) может быть получена |
|||||||||||
|
|
|
|
|
|
|
уравнен |
|
|
|
|
|
|
|
|
|
|||||||||
структурная схема, представленная на |
|
|
с. 3.23. |
|
|
|
|||||||||||||||||||
|
|
|
|
|
о |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
т |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
и |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
з |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
о |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
п |
|
Рис. 3.23. Структурная схема СДПМ |
|
|
|
|||||||||||||||||||
е |
при симметричной магнитной системе ротора |
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Р |
Данная структурная схема может использоваться для построения |
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
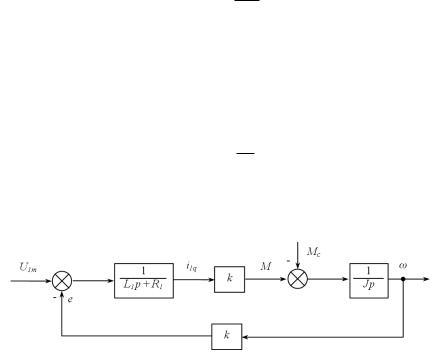
САУ скоростью или положением. Для расчета передаточных функций регуляторов можно применить методику, разработанную для двигателя постоянного тока с независимым возбуждением. В этом случае структурная схема системы автоматического управления будет иметь вид, представленный на рис. 3.24.
87
|
|
|
|
|
|
|
|
|
|
|
У |
|
|
|
|
|
|
|
|
|
|
Т |
|
|
Рис. 3.24. Структурная схема системы автоматического управления |
|
|||||||||
|
|
|
скоростью СДПМ при векторном управлении |
|
|
||||||
|
На рис. 3.24 введены следующие обозначения: |
|
|
||||||||
|
Uзс – напряжение задания скорости; |
|
|
|
|
||||||
|
Uзт – напряжение задания тока; |
|
|
|
|
|
|||||
|
Wрс – передаточная функция регулятора скорости;Н |
|
|||||||||
|
|
|
|
|
|
|
|
й |
|
|
|
|
Wрт – передаточная функция регулятора тока; |
|
|
||||||||
|
Wп – передаточная функция преобразователяБ; |
|
|||||||||
|
|
|
|
|
|
|
связи |
|
|
||
|
kос, kот – коэффициенты обратной |
|
по скорости и току. |
|
|||||||
|
|
|
|
|
|
р |
|
|
|
|
|
|
Структурная схема на рис. 3.24. может применяться для модели- |
||||||||||
рования с помощью программы MatLab с целью определения ди- |
|||||||||||
|
|
|
|
|
о |
|
|
|
|
|
|
намических характеристик элект оп ивода. Передаточные функции |
|||||||||||
регуляторов и двигателя |
еализуются |
с помощью |
стандартного |
||||||||
блока «Передаточная функция» из библиотеки Simulink. |
|
||||||||||
|
|
|
|
исслед |
|
|
|
|
|
|
|
|
Для |
полного |
|
вания электромагнитных |
процессов в |
||||||
СДПМ при векторном управлении необходимо использовать мо- |
|||||||||||
|
|
|
з |
|
|
|
|
|
|
|
|
дель, |
построеннуютна основании функциональной схемы |
||||||||||
|
|
о |
|
|
|
|
|
|
|
|
|
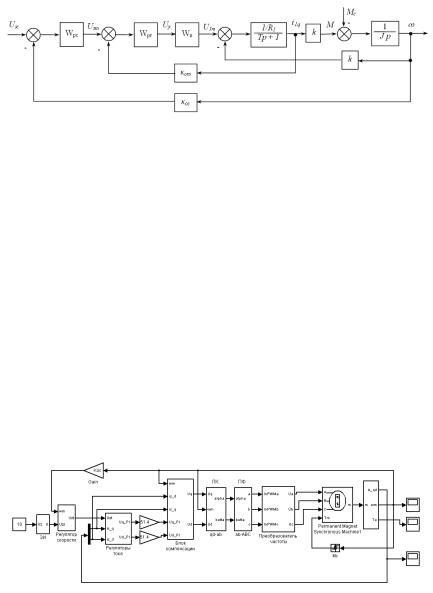
(рис. 3.22.). Структурная схема модели представлена на рис. 3.25. |
|||||||||||
|
п |
|
|
|
|
|
|
|
|
|
|
е |
|
|
|
|
|
|
|
|
|
|
|
Р |
|
|
|
|
|
|
|
|
|
|
|
Рис. 3.25. Структурная схема модели системы векторного управления СДПМ
88
Для моделирования синхронного двигателя с постоянными магнитами используется стандартный блок Permanent Magnet Synchronous Machine, расположенный в разделе Machines библио-
теки SimPowerSystems. Рассмотрим данный блок подробнее. |
|
|||||||||||||
|
Блок является моделью классической синхронной машины с по- |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
У |
стоянными магнитами. В модели не учитывается насыщение маг- |
||||||||||||||
нитной цепи, поскольку такие машины имеют, как правило, повы- |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
Т |
|
шенный воздушный зазор. Порты модели A, B и С являются выво- |
||||||||||||||
дами статорной обмотки машины. Входной порт Tm |
служит для |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
Н |
|
|
задания момента сопротивления. На выходном порту m формирует- |
||||||||||||||
ся векторный сигнал, состоящий из 10 элементов: |
|
|
|
|||||||||||
|
1–3: токи обмотки статора – isa , isb , isc ; |
Б |
|
|
||||||||||
|
|
|
|
|
||||||||||
|
4–5: проекции токов статора на оси q и d – isq , isd ; |
|
|
|||||||||||
|
6–7: проекции напряжений статора на оси q и d – Usq ,Usd ; |
|
||||||||||||
|
8: скорость ротора r; |
|
|
|
|
|
й |
|
|
|
||||
|
9: угол поворота ротора ; |
р |
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
||||
|
10: электромагнитный момент Те. |
|
|
|
|
|||||||||
|
|
|
|
|
о |
|
|
|
|
|
|
|||
|
|
|
Парамет ы настойкиблока |
2 |
|
|
||||||||
|
|
|
|
т |
|
|
|
|
|
|
|
|||
|
1. Resistance R (Ohm) – активн е соп отивление статора R (Ом). |
|||||||||||||
|
2. Inductances (Ld |
(H), Lq (H)) – индуктивности статора по про- |
||||||||||||
|
|
|
оси |
|
|
|
|
|
|
|
|
|
||
дольной и поперечной |
|
Ld |
(Гн), Lq |
(Гн). |
|
|
|
|
||||||
|
3. Flux induced by magnets (Wb) – поток возбуждения (Вб). |
|
||||||||||||
|
|
з |
|
|
|
|
|
|
|
|
|
|
|
|
|
4. Inertia, friction factor and pairs of poles (J (kg·m ), F (N·m·s), p) – |
|||||||||||||
|
о |
|
|
|
|
|
|
|
|
|
|
|
||
момент инерц J (кг·м2), коэффициент трения F (Н·м·с) и число |
||||||||||||||
пар полюс в pп. |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
п |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Для уд бства извлечения переменных состояния из вектора из- |
|||||||||||||
Кроме |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ря мых еременных электрической машины используется блок |
|||||||||||||
Machines Measurement Demux. |
|
|
|
|
|
|
||||||||
Р |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
блока синхронного двигателя с постоянными магнитами в модели используются следующие подсистемы.
ЗИ – подсистема задатчика интенсивности. Структурная схема задатчика интенсивности реализована в соответствии с рис. 2.4.
89

Подсистема «Регулятор скорости» содержит детализированную структурную схему ПИ-регулятора, на вход которого поступает разность сигналов задания скорости и обратной связи по скорости.
|
Структурная схема модели подсистемы «Регуляторы тока» пред- |
||||||||||
ставлена на рис. 3.26. В состав подсистемы входят детализирован- |
|||||||||||
ные структурные схемы ПИ-регуляторов тока по осям d и q. |
У |
||||||||||
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
Т |
|
|
|
|
|
|
|
|
|
|
|
Н |
|
|
|
|
|
|
|
|
|
|
й |
|
|
|
|
|
|
|
|
|
подсистемы |
Б«Регуляторы тока» |
|
||
|
Рис. 3.26. Структурная схема модели |
|
|
|
|||||||
|
Подсистема «Блок компенсац » (р с. 3.27) предназначена для |
||||||||||
|
|
|
|
|
|
р |
|
|
|
||
компенсации перекрестных об атных связей асинхронного двигате- |
|||||||||||
|
|
|
|
|
о |
|
|
|
|
|
|
ля с постоянными магнитами. Компенсационные напряжения опре- |
|||||||||||
деляются по выражениям |
|
|
|
|
|
|
|||||
|
|
|
|
|
т |
|
|
|
|
|
|
|
|
|
|
|
Ukq ω pп |
L1 i1d ; |
|
|
|||
|
|
|
|
и |
|
|
|
|
|
|
|
|
|
|
з |
Ukd ω pп |
L1 i1q . |
|
|
||||
|
|
|
|
|
|
|
|
|
|
||
|
|
о |
|
|
|
|
|
|
|
|
|
|
п |
|
|
|
|
|
|
|
|
|
|
е |
|
|
|
|
|
|
|
|
|
|
|
Р |
|
|
|
|
|
|
|
|
|
|
|
Рис. 3.27. Структурная схема модели подсистемы «Блок компенсации»
90