

diplom[ishodniki] / dsadas / печать234567 / ПЕЧАТь
.pdf
|
|
5 |
|
СОДЕРЖАНИЕ |
|
ВВЕДЕНИЕ ............................................................................................. |
9 |
|
1 АНАЛИЗ ТЕХНОЛОГИЧЕСКОГО ПРОЦЕССА |
|
|
ПРОМЫШЛЕННОЙ УСТАНОВКИ И ФОРМУЛИРОВАНИЕ |
|
|
ТРЕБОВАНИЙ К АВТОМАТИЗИРОВАННОМУ ЭЛЕКТРОПРИВОДУ.... |
11 |
|
1.1 |
Описание промышленной установки.......................................... |
11 |
1.2 Анализ технологического процесса промышленной установки и |
||
выбор управляемых координат электропривода. ............................................ |
13 |
|
1.3 |
Формулирование требований к автоматизированному |
|
электроприводу.................................................................................................... |
15 |
|
2 ПРОЕКТИРОВАНИЕ ФУНКЦИОНАЛЬНОЙ СХЕМЫ |
|
|
АВТОМАТИЗИРОВАННОГО ЭЛЕКТРОПРИВОДА .................................... |
17 |
|
2.1 |
Обзор систем электропривода, применяемых в промышленной |
|
установке……………………………………………………………………...... |
17 |
|
2.2 |
Выбор рациональной системы электропривода. ....................... |
21 |
2.3 |
Проектирование функциональной схемы автоматизированного |
|
электропривода.................................................................................................... |
23 |
|
3 ВЫБОР ЭЛЕКТРОДВИГАТЕЛЯ ................................................... |
25 |
|
3.1 |
Анализ кинематической схемы механизма и определение ее |
|
параметров. Составление математической модели механической части |
||
электропривода и определение ее параметров................................................. |
25 |
|
3.2 |
Расчет нагрузок, построение механической характеристики Ммех |
|
= f(ω) и нагрузочной диаграммы механизма Ммех = f(t).................................. |
31 |
|
3.3 |
Предварительный выбор двигателя по мощности. ................... |
36 |
3.4 |
Выбор номинальной скорости и типоразмера двигателя. |
|
Построение характеристики Мдоп = f(ω), где ωмин≤ ω≤ ωмакс. ......................... |
36 |
|
|
6 |
3.5 Построение нагрузочной диаграммы электропривода M = f(t) за |
|
цикл работы. ........................................................................................................ |
43 |
3.6 Проверка выбранного |
электродвигателя по нагреву и |
перегрузочной способности. .............................................................................. |
44 |
4 ПРОЕКТИРОВАНИЕ ПРЕОБРАЗОВАТЕЛЯ ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ ………………………………………………………………………47
4.1 Определение возможных вариантов и обоснование выбора вида |
|
преобразователя электрической энергии.......................................................... |
47 |
4.2 Расчет параметров и выбор электрических аппаратов силовой |
|
цепи: входного и выходного фильтров, тормозного резистора. .................... |
50 |
5 ПРОЕКТИРОВАНИЕ СИСТЕМЫ АВТОМАТИЧЕСКОГО |
|
УПРАВЛЕНИЯ.................................................................................................... |
52 |
5.1 Выбор датчиков для измерения управляемых |
координат |
электропривода.................................................................................................... |
52 |
5.2 Составление математических моделей (уравнений, структурных схем) объекта управления, датчиков и исполнительного устройства………………………………………………………………………53
5.3Расчет параметров объекта управления, датчиков и
исполнительного устройства. ............................................................................ |
58 |
5.4 Проектирование регуляторов на основании разработанных |
|
математических моделей и требований к автоматизированному |
|
электроприводу.................................................................................................... |
64 |
6 РАСЧЕТ И АНАЛИЗ ДИНАМИЧЕСКИХ И СТАТИЧЕСКИХ ХАРАКТЕРИСТИК АВТОМАТИЗИРОВАННОГО ЭЛЕКТРОПРИВОДА. 67
6.1 Разработка |
компьютерной |
(имитационной) |
модели |
автоматизированного электропривода.............................................................. |
|
67 |
|
7
6.2 Расчет переходных процессов и определение показателей качества…………………………………………………………………………72
6.3 Расчет зависимости задающего воздействия от времени U3 = f(t) |
|
для реализации технологического процесса за цикл работы. ........................ |
77 |
6.4Построение статических характеристик электропривода,
соответствующих зависимости U3 = f(t) за цикл работы. ............................... |
79 |
7 ОКОНЧАТЕЛЬНАЯ ПРОВЕРКА ПРАВИЛЬНОСТИ ВЫБОРА |
|
ДВИГАТЕЛЯ ....................................................................................................... |
81 |
7.1 Построение точной нагрузочной диаграммы электропривода за |
|
цикл работы автоматизированного электропривода. ...................................... |
81 |
7.2 Проверка электродвигателя по нагреву и перегрузочной |
|
способности электропривода по точной нагрузочной диаграмме. ................ |
81 |
8 ПРОЕКТИРОВАНИЕ СИСТЕМЫ АВТОМАТИЗАЦИИ |
|
ПРОМЫШЛЕННОЙ УСТАНОВКИ НА ОСНОВЕ ПРОГРАММИРУЕМОГО |
|
КОНТРОЛЛЕРА .................................................................................................. |
83 |
8.1 Формализация условий работы промышленной установки. .... |
83 |
8.2 Разработка алгоритма и программы управления....................... |
83 |
8.3Проектирование функциональной схемы системы
автоматизации...................................................................................................... |
|
|
88 |
|
8.4 |
Выбор аппаратов системы автоматизации................................. |
89 |
||
8.5 |
Проектирование схемы |
электрической соединений |
системы |
|
автоматизации...................................................................................................... |
|
|
91 |
|
8.6 |
Полное |
описание |
функционирования |
системы |
автоматизации…………………………………………………………………..93 |
||||
9 ПРОЕКТИРОВАНИЕ СХЕМЫ ЭЛЕКТРОСНАБЖЕНИЯ И |
||||
ЭЛЕКТРИЧЕСКОЙ ЗАЩИТЫ ПРОМЫШЛЕННОЙ УСТАНОВКИ........... |
95 |
|||
8
9.1 Выбор аппаратов, проводов и кабелей. ...................................... |
95 |
10 ПРОЕКТИРОВАНИЕ СХЕМЫ ЭЛЕКТРИЧЕСКОЙ ПРИНЦИПИАЛЬНОЙ АВТОМАТИЗИРОВАННОГО ЭЛЕКТРОПРИВОДА…………………………………………………………100
10.1 Схема электрическая |
принципиальная автоматизированного |
электропривода.................................................................................................. |
100 |
10.2Составление перечня элементов электрооборудования
промышленной установки................................................................................ |
102 |
10.3 Полное описание функционирования схемы электрической |
|
принципиальной автоматизированного электропривода.............................. |
103 |
11 ОХРАНА ТРУДА..................................................................... |
105 |
12 ЭКОНОМИЧЕСКОЕ ОБОСНОВАНИЕ ТЕХНИЧЕСКИХ РЕШЕНИЙ…………………………………………………………………….113
9
ВВЕДЕНИЕ
На данном этапе технического прогресса во всех развитых странах мира в последние годы принято направление, согласно которому необходимо как можно эффективнее распределять и использовать все виды энергоресурсов. Это позволяет не только сберечь потраченные средства, но и рационализировать производство посредством его модернизации.
Так основными мероприятиями по энергосбережению и в частности в данном дипломном проекте являются: оптимальный выбор мощности электродвигателя насосной установки, а также использование частотно-
регулируемого электропривода.
Турбомеханизмы являются машинами массового применения.
Около 25% всей вырабатываемой электроэнергии расходуется на электропривод насосов, вентиляторов и компрессоров. Техническое совершенство и экономичность электроприводов турбомеханизмов в значительной степени определяют рациональность использования электроэнергии в народном хозяйстве. Под экономичностью электропривода следует понимать не только его минимальную стоимость и высокие энергетические показатели, но и такое качество электропривода, как регулируемость. Высокая экономичность электропривода позволяет турбомеханизмам производить работу, необходимую по технологическим условиям, с наименьшими энергетическими затратами.
Большинство насосных установок стран постсоветского пространства использует нерегулируемый электропривод, что приводит к лишним затратам электроэнергии. Использование регулируемого электропривода насосных агрегатов показало, что регулирование скорости рабочего колеса насосов позволяет существенно повысить энергетические показатели установок, получить значительную экономию электроэнергии, и
10
сократить потери воды за счет исключения избытка давления в гидравлической сети.
Таким образом производится модернизация действующих насосных установок, применяя в цепи питания преобразователи частоты, позволяющие регулировать скорость двигателя. При этом используются преобразователи как иностранных, так и отечественных фирм-производителей.
Целью данного дипломного проекта является проектирование частотно-регулируемого электропривода насосной установки. Применение частотно-регулируемого электропривода турбомеханизмов позволяет обеспечить требуемые технологические показатели при существенном сокращении затрат электроэнергии. Тема данного дипломного проекта является весьма актуальной в настоящее время.
|
|
|
11 |
1 АНАЛИЗ |
ТЕХНОЛОГИЧЕСКОГО |
ПРОЦЕССА |
|
ПРОМЫШЛЕННОЙ |
УСТАНОВКИ И ФОРМУЛИРОВАНИЕ |
||
ТРЕБОВАНИЙ |
К |
АВТОМАТИЗИРОВАННОМУ |
|
ЭЛЕКТРОПРИВОДУ |
|
|
|
«Мозырский нефтеперерабатывающий завод» (полное наименование Открытое Акционерное Общество «Мозырский нефтеперерабатывающий завод») — одно из двух белорусских нефтеперерабатывающих предприятий. Завод расположен в промышленной зоне города Мозыря в 15 км к югу от жилых массивов города. Предприятие является крупномасштабным, и для правильного ведения технологического процесса всего завода, необходимо своевременное, и в достаточном количестве поступление как технологической, так и питьевой воды на территорию завода и близ расположенных объектов. Для решения этой проблемы были применены насосы для подъёма и транспорта воды на необходимые расстояния.
1.1 Описание промышленной установки.
Для обеспечения водой завода и околозаводных объектов используется оборудование, расположенное на станции «Насосная II – IV
подъёма». На станции размещены насосные установки для обеспечения подачи питьевой и технологической воды. По сути станция и разделена на два типа перекачиваемой жидкости. Второй этап подъёма говорит о менее тщательной фильтрации воды, в отличие от четвёртого, где вода фильтровалась как минимум трижды.
Часть насосов, расположенных в машинном отделении перекачивает воду для обеспечения рабочего персонала чистой питьевой водой. Другие насосы необходимы для подачи технологической воды на блоки первичной и вторичной переработки нефти, производства химических веществ, и других
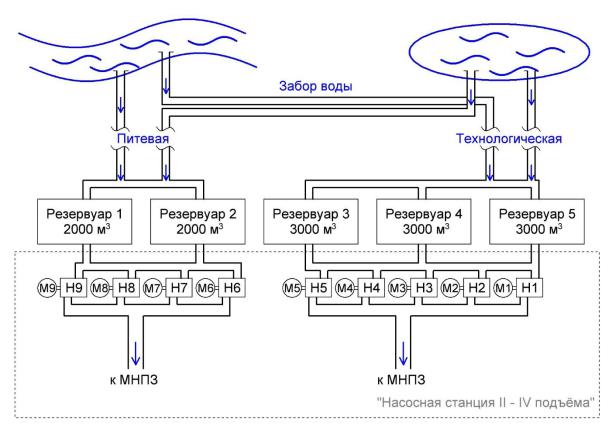
12
установок, не требующих высокого качества фильтрации воды. Причём, если для технологической воды станция является вторым этапом подъёма, то для питьевой воды это уже четвёртый. В зависимости от вида используемой воды, для её забора используются различные источники, такие как природные водоёмы, реки, родники, после чего поступает в резервуары,
также разделённые по типу находящейся в них воды, и по объёму.
Представим общий вид промышленной установки на следующем рисунке:
Рисунок 1.1 – Общий вид промышленной установки с размещением оборудования
На рисунке 1.1 приняты следующие условные обозначения:
Н1 … Н9 – насосы, соответственно 1 … 9;
М1 … М9 – двигатели, соответственно 1 … 9.
13
В данном дипломном проекте стоит задача модернизации процесса подачи питьевой воды на Мозырский нефтеперерабатывающий завод
1.2 Анализ технологического процесса промышленной установки и выбор управляемых координат электропривода.
В нашем технологическом процессе применяется 4 параллельно установленные насосные установки. Однако при этом один насос работает постоянно (Н6 или Н7), а третий включается при аварийном останове одного из рабочих насосов. Четвёртый насос (Н9) необходим на случай пожарных ситуаций и постоянно выключен. Насос Н6 является основным рабочим насосом, который постоянно поддерживает необходимый напор в сети,
определяющийся режимом водопотребления. Насос Н7 предназначен для поддержания (подкачки) заданного напора, когда необходимо сменить насос Н6, с целью равномерного износа двигателей. Насос Н8 является резервным,
который вступает в работу в случае выхода из строя насоса Н6 или насоса Н7.
Управляемой координатой в данной установке является поддержание давления в заданных пределах. Текущее значение давления в напорной части водопровода поступает от датчика давления. В соответствии с поступившим значением давления контроллер дает задание на преобразователь частоты и подключает его к одному из трех насосов.
Наиболее широкое распространение получили установки с центробежными насосами.
В спиральном корпусе насоса помещается рабочее колесо с лопатками. При вращении колеса двигателем жидкость, поступающая к центру колеса из заборного резервуара через всасывающий трубопровод и открытую задвижку, центробежной силой выбрасывается по лопаткам на периферию корпуса. В результате в центре рабочего колеса создается

14
разряжение, жидкость засасывается в насос, снова выбрасывается и далее подается в напорный трубопровод. Таким образом, в системе при открытой задвижке создается непрерывное течение, и центробежный насос имеет равномерный ход.
Приведём принципиальную схему центробежного насоса на рисунке
1.2 с описанием работы механизма и указанием на нём основных элементов,
участвующих в технологическом процессе.
Рисунок 1.2 - Принципиальная схема центробежного насоса
1 - рабочая камера; 2 - рабочее колесо; 3 - направляющий аппарат; 4 - вал; 5 - лопатка рабочего колеса; 6 - лопатка направляющего аппарата; 7 - нагнетательный патрубок; 8 -
подшипник; 9 - корпус насоса (опорная стойка); 10 - гидравлическое торцовое уплотнение вала (сальник); 11 - всасывающий патрубок.
На рабочем колесе имеются лопатки (лопасти), которые имеют сложную форму. Жидкость подходит к рабочему колесу вдоль оси его вращения, затем направляется в межлопаточный канал и попадает в отвод.
Отвод предназначен для сбора жидкости, выходящей из рабочего колеса, и
преобразования кинетической энергии потока жидкости в потенциальную энергию, в частности в энергию давления. Указанное выше преобразование