

9.Компоновочные схемы прицепов
Чаще всего с поворотной тележкой(угол поворота не менее 90 град.)
Двухосные










Трехосные
Схема 1 Схема 2
























Схема 3 Схема 4






























Схема 5 Схема 6



































Основные параметры компоновки прицепа

|
Полная масса,т |
База, Lпр |
Колея |
Высота пола |
Клиренс |
|
3,5…4,5 |
2400…2500 |
1600…1800 |
1160…1200 |
300…400 |
|
4,5…6,5 |
2500…3000 |
1800…2000 |
1200…1250 |
350…400 |
|
6,5…8,5 |
3000…3500 |
1800…1900 |
1200…1250 |
350…400 |
|
8,0…12,0 |
3500…4300 |
1800…1950 |
1250…1400 |
350…400 |
|
12,0…14,0 |
4300…4500 |
1850…1950 |
1250…1400 |
400…450 |
10.Компоновочные схемы полуприцепов
Двухосные
Схема1 Схема2



















Схема 3 Трехосные Схема 4



















Схема 5 Схема 6



























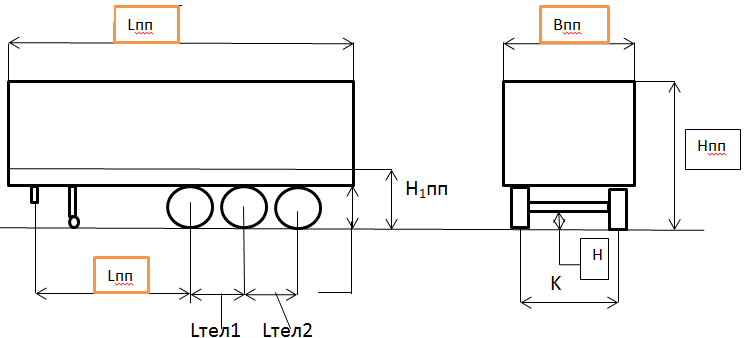
Основные параметры компоновки прицепа
|
Полная масса, т |
Число осей |
База |
Колея, К |
Высота пола, nпп1 |
Клиренс, nпп | |||||
|
Lпп |
Lтел1 |
Lтел2 | ||||||||
|
10…18 |
1 |
5400…6000 |
- |
- |
1800.1850 |
14001450 |
320…400 | |||
|
19…28 |
2 |
6150…6500 |
1320…2050 |
- |
1850…1900 |
1400..1450 |
260…320 | |||
|
Более28 |
3 |
6200…6500 |
1320…1540 |
1320…1540 |
1900.2000 |
1450 |
300…320 | |||
11. Выбор основных параметров компоновки прицепа и полуприцепа.


12. Способы управления прицепными звеньями, повышающие маневренность.
Применяются системы управления колес (осями колес или тележками), прицепов (полуприцепов) которые обеспечивают меньшие габаритные полосы движения.
Различают системы с ручным управлением и автоматизированные.
По типу привода: механические, гидравлические, электрогидравлические.
Механические – наиболее распространены и являются системами прямого действия.
Требуемая кинематика обеспечивается: 1) поворот колес за счет конструктивно заданного соотношения между углами складывания. 2) Поворот колес или осей может выполняться с задержкой по времени с помощью специальных устройств. 3) Поворот ведомых звеньев и ведомых колес выполняется на одни и те же углы. 4) Поворот колес ведомых звеньев корректируется во время движения. 5) поворот колес за счет тяговых и тормозных моментов.
13. Графический способ построения основной траектории полуприцепа.
О. – проекция на форму и плоскость середины вед. Моста(тележки при движении АП она передвигается по траектории m-m)
На основной траектории откладывается последовательно положение Оо на расстоянии между ними от ½ до ¾ базы полуприцепа.
Радиусом равным длине базы полуприцепа проводим дуги n-n с центром в точках О1; О2. И т.д. при любом положении Оо на траектории есть 2 граничных положения продольной оси полуприцепа. 1) находим смещение продольной оси полуприцепа. Оо Ао вверх до совпадения точки ао с точкой А1 на дуге n-n и поворотом этой оси вокруг А1 до совпадения Оо с точкой О1 находим поворотом оси Оо ао вокруг (.) ао на угол ОоАоО1 так чтобы эта ось совпала с прямой О1Ао пересечение с дугой n-n получ (.) А1’’. Середина моста полуприцепа может находится на дуге n-n в пределах (.)А1’до А1’’ допустим точка начала на середине дуги. Соединяем кривой линией АоиА1 аналогичным образом строятся другие положения (.) Ао например (.)А2.