

3.2 Графический метод
3.2.1 Кинематический анализ
Расчет выполняем для положения 11, в котором угловая скорость 1= 11, 275 рад/c, угловое ускорение 1= -3,982 рад/с2. Направление 1 противоположно направлению 1.
Скорость точки А:
 м/с
м/с
Принимаем масштабный коэффициент V=0,02 м/c*мм, тогда отрезок изображающий VA равен :
 мм
мм
Скорость точки
А
 и направлена в сторону вращения кривошипа.
Скорость в точке В находим путем
построения плана скоростей согласно
векторным уравнениям:
и направлена в сторону вращения кривошипа.
Скорость в точке В находим путем
построения плана скоростей согласно
векторным уравнениям:

 ,
,
где
 ,
, =0 ( точкаB0
направляющих ползуна неподвижна),
=0 ( точкаB0
направляющих ползуна неподвижна),

х.
х.
Точку S2 находим по свойству подобия:
 мм
мм
Из плана скоростей находим
 м/с
м/с
 м/с
м/с
 рад/c
рад/c
Ускорение точки А:
 ,
,
где
 -нормальное
ускорение точкиА,
направленное от точки А
к точке О;
-нормальное
ускорение точкиА,
направленное от точки А
к точке О;
 -
касательное ( тангенциальное) ускорение
точки А,
направленное перпендикулярно ОА
в сторону
углового ускорения 1.
-
касательное ( тангенциальное) ускорение
точки А,
направленное перпендикулярно ОА
в сторону
углового ускорения 1.
 м/с2
м/с2
 м/с2
м/с2
Принимаем масштабный
коэффициент
 =0,2м/с2*мм.
Находим отрезки изображающие
=0,2м/с2*мм.
Находим отрезки изображающие
 и
и .
.
 мм
мм
 мм
мм
Ускорение точки B находим путем построения плана ускорений согласно векторным уравнениям:

где
 -
нормальное относительное ускорение
точки В по отношению к точке А, направленное
от точки В к точке А;
-
нормальное относительное ускорение
точки В по отношению к точке А, направленное
от точки В к точке А;
 -
тангенциальное относительное ускорение,
направленное перпендикулярно АВ;
-
тангенциальное относительное ускорение,
направленное перпендикулярно АВ;

х.
х.
 м/с2
м/с2
Отрезок , изображающий
 равен
равен
 мм
мм
Точку S2 находим по свойству подобия:
 мм
мм
Из плана скоростей находим:
 м/с2
м/с2
 м/с2
м/с2
 рад/с2.
рад/с2.
3.2.2 Силовой анализ
Определяем силы и моменты сил инерции звеньев:
 H*м
H*м
 Н
Н
 Н*м
Н*м
 Н
Н
Силы инерции направляются противоположно ускорению центра масс , а моменты сил инерции противоположно угловым ускорениям звеньев.
Определяем структурную группу (2,3):
В точке В приложена
реакция
 ,
а в точке А- реакция
,
а в точке А- реакция ,
которая раскладывается на тангенциальную
составляющую
,
которая раскладывается на тангенциальную
составляющую и
нормальную составляющую
и
нормальную составляющую ,
направленную вдоль звена АВ.
,
направленную вдоль звена АВ.
Составляющую
 находим
из уравнения:
находим
из уравнения:


Составляющую ,
полные реакции
,
полные реакции и
и находим
путем построения плана сил согласно
уравнению равновесия группы, записанному
в соответствии с принципом Даламбера:
находим
путем построения плана сил согласно
уравнению равновесия группы, записанному
в соответствии с принципом Даламбера:

Принимаем масштабный
коэффициент
 70
Н/мм
70
Н/мм
Находим отрезки изображающие известные силы
[1-2] мм
мм
[2-3]
 мм
мм
[3-4]
 мм
мм
[4-5]
 мм
мм
[5-6]
 мм
мм
[6-7]
 мм
мм
Из плана сил находим
 Н
Н
 Н
Н
 Н
Н
Реакцию
 находим из уравнения равновесия звена
2:
находим из уравнения равновесия звена
2:

 Н
Н
Рассматриваем
кривошип 1. В точке А приложена реакция
 , а в точке О реакция
, а в точке О реакция ,
которую находят путем построение плана
сил согласно уравнению равновесия :
,
которую находят путем построение плана
сил согласно уравнению равновесия :

Принимаем масштабный
коэффициент
 70
Н/мм
70
Н/мм
[1-2]= мм
мм
[2-3] мм
мм
 Н
Н
Уравновешивающий (движущий )Myр момент находим из уравнения:

 Н*м
Н*м
3.3. Аналитический метод
3.3.1 Кинематический анализ
Расчет выполняется для положения 11:
1. рад/ с
рад/ с
2. м /с
м /с
3.
4.
5. рад/с2
рад/с2
6. м/c2
м/c2
7.
8.
9.
 м/c
м/c
10.
 м/c2
м/c2
3.3.2.Силовой анализ
Силы и моменты сил звеньев
1. Н*м
Н*м
2. Н
Н
3. Н
Н
4. Н
Н
5. Н
Н
Расчетные схемы для силового анализа статически определимой структурной группы (2-3) и кривошипа 1 изображены на рисунках 12 и 13
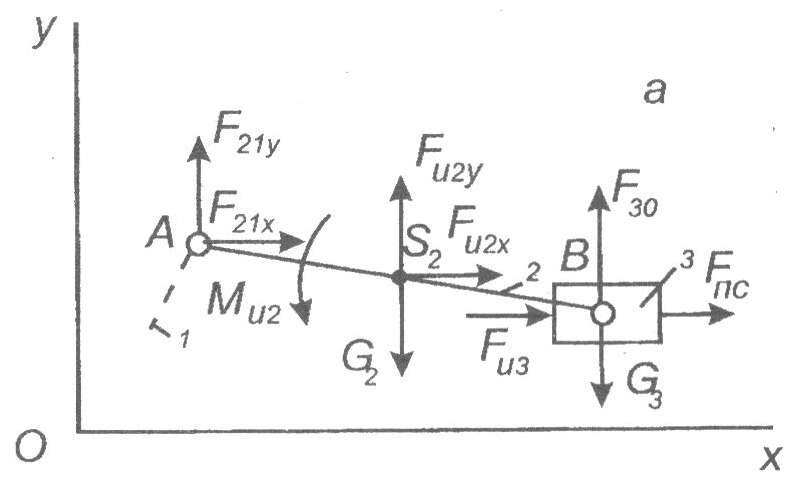
Рис. 12
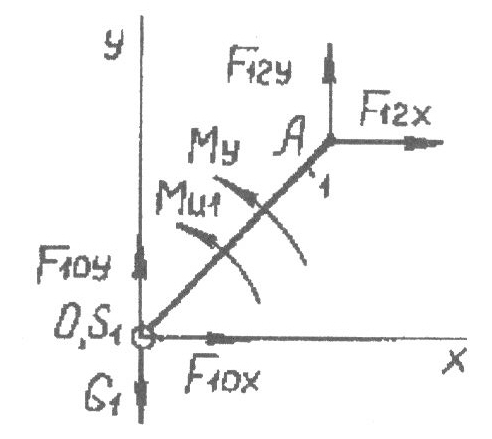
Рис. 13
Из уравнений проекций сил на координатные оси и уравнений моментов находим реакции в кинематических парах и уравновешивающий момент.
6.
7.
8.
9.
10
11.
12.
13.
14.
15.
16.
17.

18.
