

5.3. Пх следящей системы.
Вновь
изменяем Кпу1
до достижения
 =0,05%.Получаем
Кпу1=0.706765.
=0,05%.Получаем
Кпу1=0.706765.
На рис. 17 представлена полученная ПХ:
Рис.
17. ПХ
настроенной СС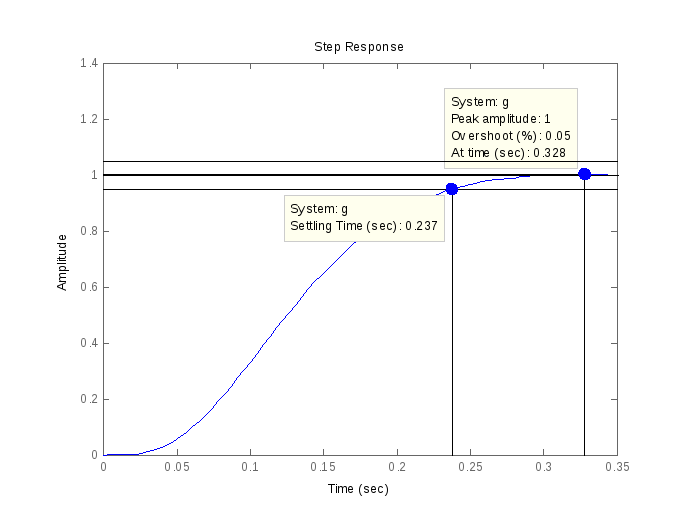
6. Анализ чувствительности сар скорости к выбору ку.
Рис.
18. ПХ
САР-скорости с изменением Т2
в сторону увеличения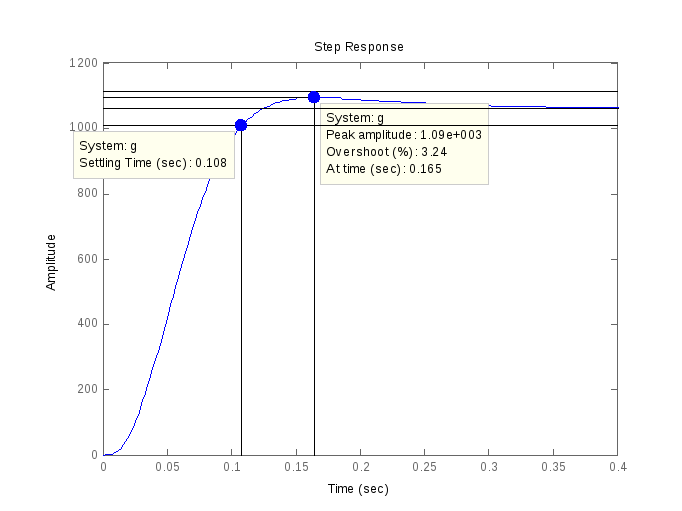
На рис. 19 представлена ПХ САР-скорости с изменением Т2в сторону уменьшения на 20%.
Рис.
19 ПХ
САР-скорости с изменением Т2
в сторону уменьшения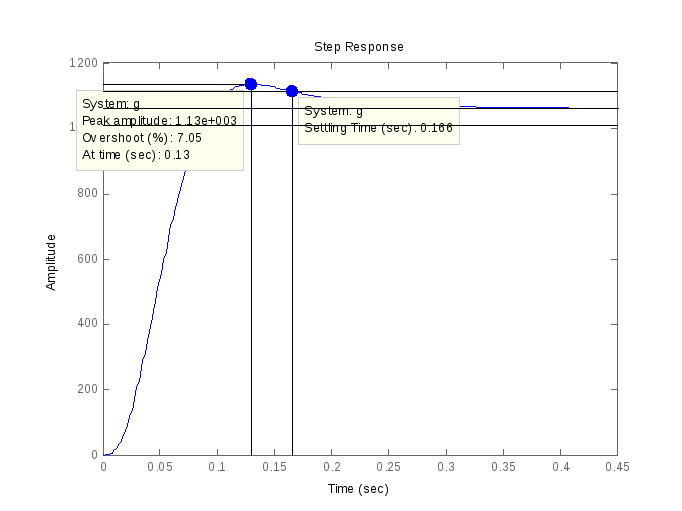
|
|
T2 |
T2-∆T |
T2+∆T |
|
0,032 |
0,032*0.8 |
0,032*1.2 | |
|
|
5 |
7.05 |
3.24 |
|
tрег |
0.145 |
0.166 |
0.108 |
 ,%
,%
При изменении T2 на -20% наблюдается увеличение σ на 2.05 и увеличение tрег на 0.021.
При изменении T2 на +20% наблюдается уменьшение σ на 1.76 и уменьшение tрег на 0.037.
Стоит отметить, что изменение коэффициента Т2 не повлияло на установившееся значение позиционной ошибки.
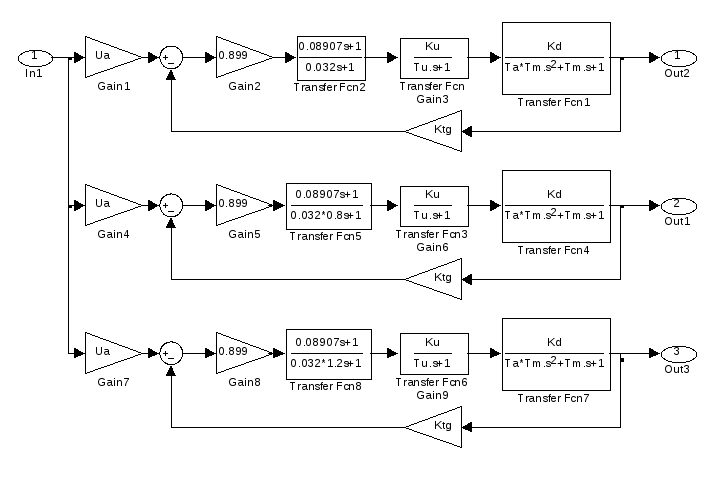
7. Коррекция электромеханической следящей системы в пространстве состояний.
7.1. Структурная схема и матрично-векторное описание системы с доступом к переменным состояния.
На
рис. 20 представлена структурная схема
следящей системы с доступом к переменным
состояний: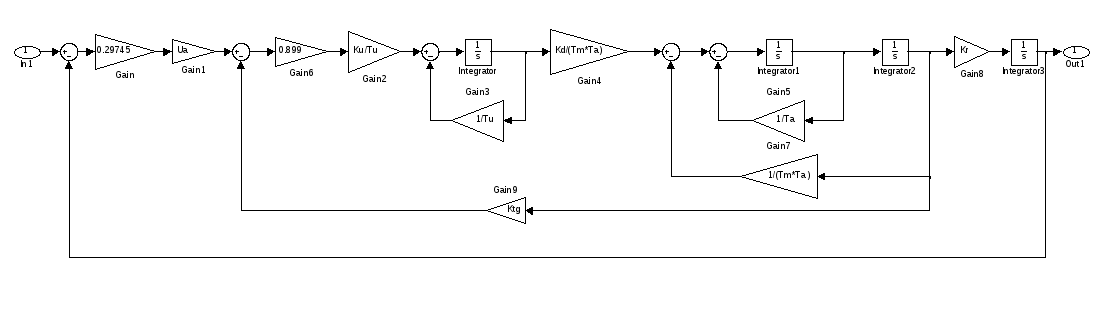
Рис.
20.
Задаем в рабочей области уравнение системы в матрично-векторном виде:
>>D=[0]
>>C=[1 0 0 0]
>>B=[0;0;0;0.29745*220*0.899*Ku/Tu]
>>A=[0 Kr 0 0;0 0 1 0;0 -1/(Tm*Ta) -1/Ta Kd/(Tm*Ta);-0.29745*220*0.899*Ku/Tu -Ktg*0.899*Ku/Tu 0 -1/Tu]
>>u1=ss(A,B,C,D)
>>u2=tf(u1)
Определим корни исходной системы:
>>pole(u2)
p1 =
-34.9382 +31.3564i
-34.9382 -31.3564i
-5.9853 + 2.4736i
-5.9853 - 2.4736i
Сместим корни в три раза влево и сформируем полином:
>>p1=pole(u2)
>>p=p1*3
p =
1.0e+002 *
-1.0481 + 0.9407i
-1.0481 - 0.9407i
-0.1796 + 0.0742i
-0.1796 - 0.0742i
Используя zpk-форму проверяем переходный процесс полученной системы. Ожидаемый переходный процесс быстрее исходного ориентировочно в 2 разаtp=0.226c
>>hg=zpk([],p,1000)
>>step(hg)
График
ПХ zpk-формы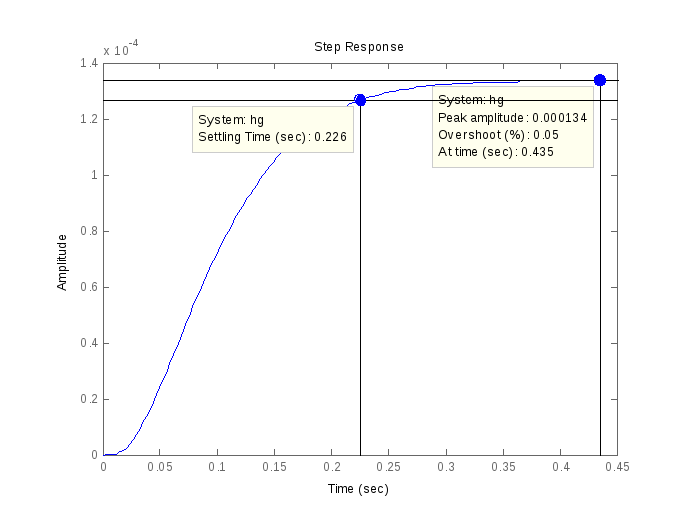
7.2. Структурная схема и векторно-матричное описание системы с модальным регулятором.
Формируем матрицу корней модального регулятора:
>>k=acker(A,B,p)
|
|
80.0000 |
|
|
0.0440 |
|
|
0.0015 |
|
|
0.0209 |




На рис. 21 представлена схема с модальным регулятором:

Рис.
21.
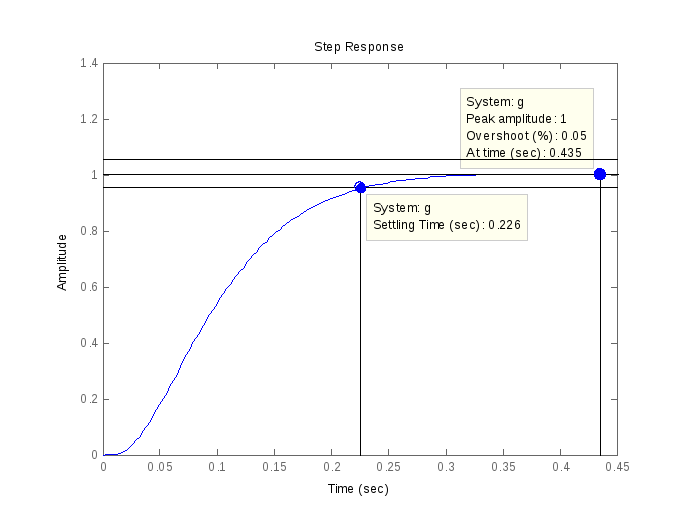
Определим коэффициент формы, необходимый для достижения hуст=1.
Кф=1/ hуст=1/0.0123
Рис.
22.
Получим переходный процесс всех переменных состояний:
>>l=augstate(u1)
>>step(l)
На рис. 23 представлены переходные характеристики переменных состояний Х1, Х2, Х3, Х4:
Рис.
23.
8.Реализация цифрового модального регулятора.
Рис.
24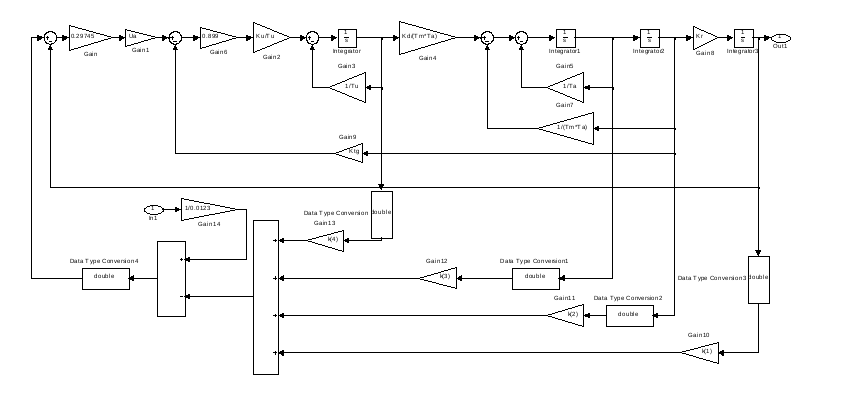
На рис. 25 представлен переходной процесс системы с цифровым модальным регулятором, указано время переходного процесса:
Рис.
25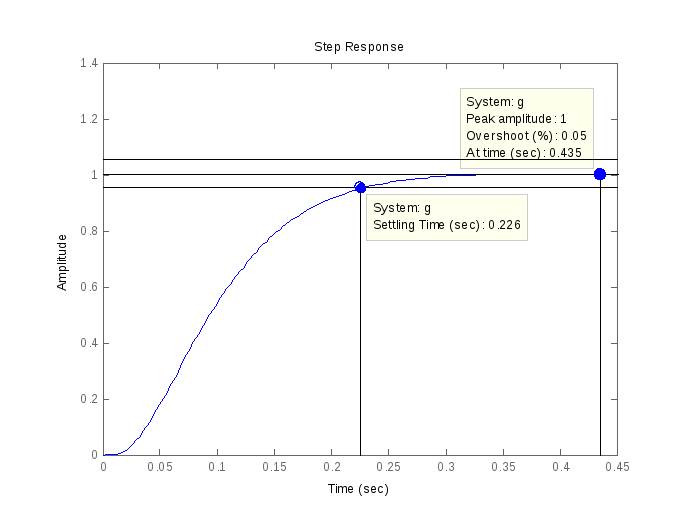
Заключение
В результате выполнения курсовой работы проводится анализ ее этапов и делаются выводы по каждому разделу.
Используемый теоретический материал приводится для получения математического описания и математических моделей элементов электромеханической системы.
При выполнении курсовой работы приводятся полученные временные и частотные характеристики для анализа устойчивости и параметров качества регулирования исходной нескорректированной системы.
Описывается корневой метод проектирования последовательного корректирующего устройства для САР скорости с использованием rlt-функции программыMatlab.
Анализируется векторно-матричное описание системы и использование модального регулятора для достижения заданных показателей качества регулирования следящей системы.
При реализации цифрового модального регулятора задаются параметры блоков в дискретной форме и оценивается вид переходной характеристики.
При исследовании наблюдателя оценивается вид переходной характеристики.