

4.2.2. Анализ показателей качества сс.
>>hssr=hsr*h5*h6*h7
>>g=feedback(hssr,1)
>>step(g)
Получаем график колебательной ПХ,
несоответствующий требуемому:
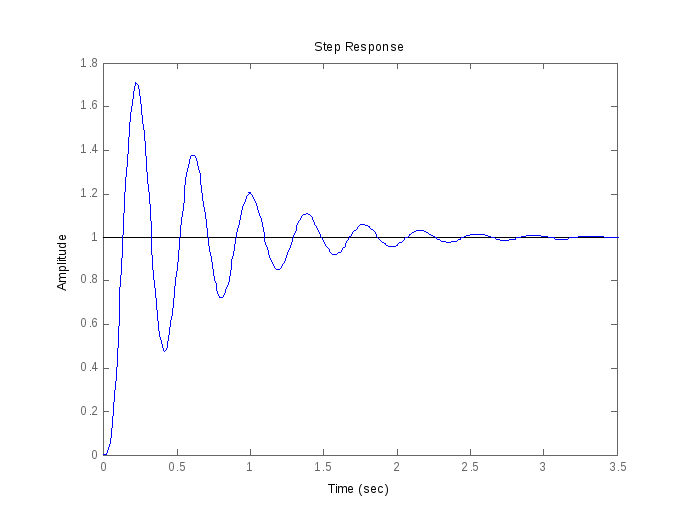
Подбираем коэффициент Кпу1: (Kpu1 = 0.29745)
>>h6=tf(0.29745)
>> hssr=hsr*h5*h6*h7
>>g=feedback(hssr,1)
>>step(g)
Получаем необходимую ПХ следящей системысо следующими показателями качества (Рис. 9.):
 =
0.05 %; tр
= 0.678
с.
=
0.05 %; tр
= 0.678
с.
Коэффициент: Кпу1 = 0.29745
Рис.
9. Переходная
характеристика СС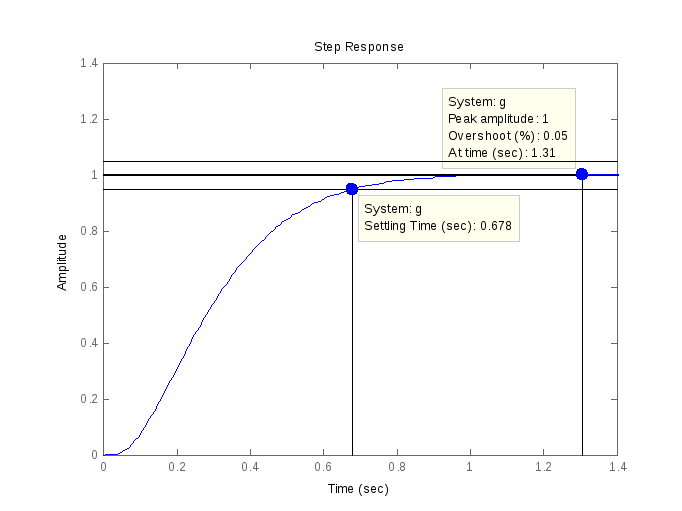
4.3. Анализ точности скорректированной системы.
4.3.1. Скоростная ошибка системы.
>> hss1=feedback(1,hssr)
>> h0=tf(1, [1 0])
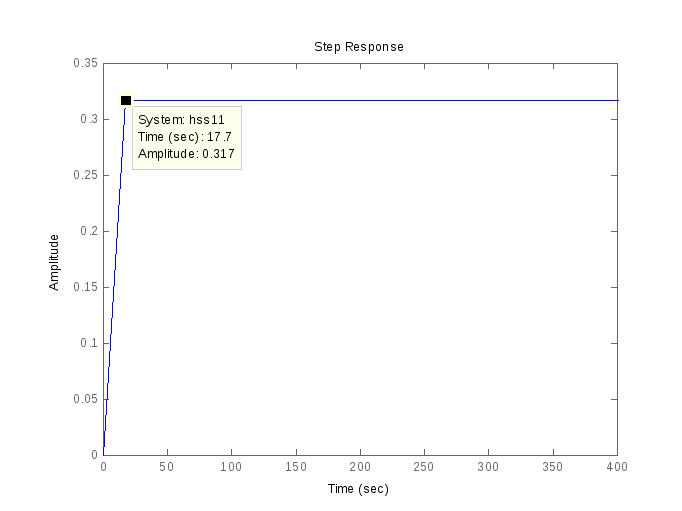
>> hss11=h0*hss1
>> step(hss11)
Рис.
10.
ПХ по

 =
0.317
=
0.317
4.3.2. Позиционная ошибка САР скорости.
>> hsr1=feedback(1, h1*h2*h3*h4)
>> hsr11=220*hsr1
>> step(hsr11)
Рис.
11. ПХ по позиционной
ошибке


На рис. 11. Представлен график позиционной ошибки ε1(t). ε уст1(t)=217
Определяем
 :
:
 =
=
 %
= 20.4717%
%
= 20.4717%
5. Коррекция двухконтурной электромеханической следящей системы.
Так как переходная характеристика h(t) при настройке hуст = 217 [об/мин] имеет перерегулирование σ, которое не совпадает с σзад = 5%, то требуется ввести корректирующее устройство.
5.1.ПХ двигателя.


Вызываем оператор: >>DEE
В среде Matlab переменные имеют вид:
U(1)-входной сигнал
X(1) и Х(2)- внутренние переменные(ток и угловая скорость)
У(1)-выходной сигнал

На рис. 12 представлена ПХ двигателя hуст=0.543 равно рассчитанному Кд.
Рис.
12

5.2. Коррекция САР скорости.
При
изменении Кпу2
было достигнуто hуст=n=1060
об/мин. Требуется по ПХ получить
 =5%.
Т.к. Кпу2=0.899
не изменяется, то требуется ввести
корректирующее устройство:
=5%.
Т.к. Кпу2=0.899
не изменяется, то требуется ввести
корректирующее устройство:

Исследование выполняется с помощью rltool-функции. На рис. 13 представлена схема корневого годографа.

Рис.
13. Упрощенная
схема корневого годографа
Элементы корневого годографа:
G – разомкнутая САР скорости;
С – компенсатор, коэффициент передачи равен 1;
F – задающее напряжение, коэффициент передачи 220;
H – тахогенератор, коэффициент передачи Ктг.
Размещая
полюс p
и ноль z
на ЛАЧХ разомкнутой системы вблизи
запаса по амплитуде
 ,
добиваемся по выведенной переходной
характеристике заданного
,
добиваемся по выведенной переходной
характеристике заданного =
5%.
=
5%.
Записываем в рабочей области:
>>rltool
>>[a,b,c,d]=linmod(‘sacs_k2_ol’)
//’sacs_k2_ol-файл, содержащий разомкнутую САР-скорости
>>h1=ss(a,b,c,d)
>>f=tf(220)
>>c=tf(1)
>>h=tf(0.0028)
>>g=tf(h1)
ПФ
полученного КУ в tf
- форме:
 .Вводим
полученное КУ в схему после Кпу2.Изменяем
коэффициент в числителе до тех пор, пока
не получим
.Вводим
полученное КУ в схему после Кпу2.Изменяем
коэффициент в числителе до тех пор, пока
не получим
 =5%.
=5%.
( )
)
На рис. 14 представлена ПХ скорректированной
САР-скорости: =5%,tнар=0.0533с,tрег=0.145с.
=5%,tнар=0.0533с,tрег=0.145с.
Рис.
14. ПХ
скорректированной САР-скорости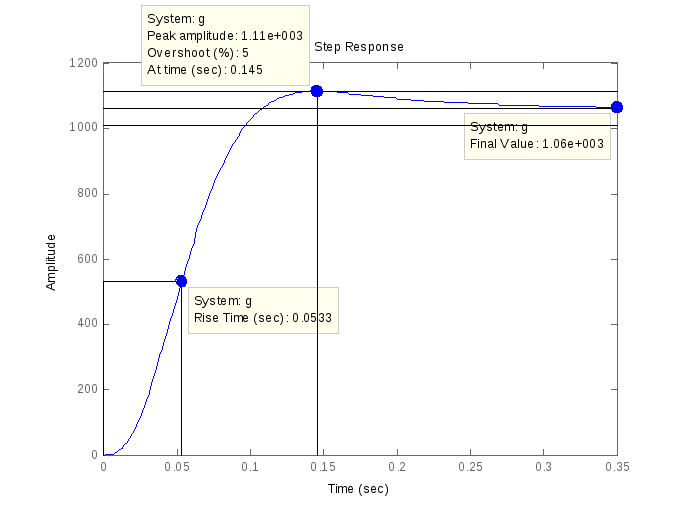
На рис. 15 представлена ИПХ скорректированной САР-скорости
Рис.
15. ИПХ
скорректированной САР-скорости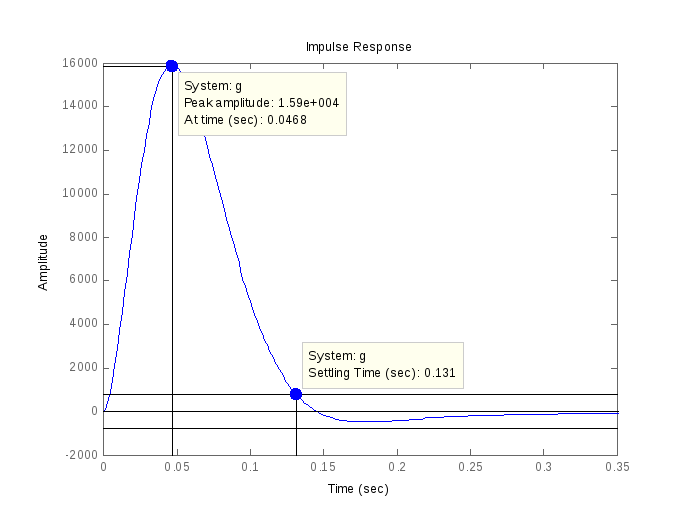
На рис. 16 представлена схема реализации корректирующего устройства.
Рис.
16. Схема
реализации корректирующего устройства
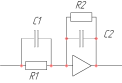
Рассчитаем параметры элементов КУ:
T1 = 0,08907с; T2 = 0,032с;
R1 = R2 = 10 кОм;
Так как C=T/R, то
C1= 8.907 мкФ; С2 = 3.2 мкФ.