3. Выбор электродвигателя.
Выбор двигателя ориентировочно выбирается по мощности:
 (3.1)
(3.1)
где kз = 1,2…1,6 – коэффициент, учитывающий требования к динамическим характеристикам ЭП (меньшему времени переходного процесса соответствует большее значение коэффициента). При мощности до 1,5 кВт рекомендуется выбрать двигатель на номинальное напряжение UH 110 В, от 1,5 до 6 кВт на 220 В, свыше 6 кВт – на 440 В.
Выбираем двигатель 4ПФ132М [2].
Таблица 2. Параметры двигателя 4ПФ132М [2]:
|
Параметр |
Значение |
|
Номинальная мощность, кВт |
|
|
Момент номинальный, Н*м |
|
|
Номинальный ток, А |
|
|
Номинальное напряжение, В |
|
|
Момент инерции, кг*м2 |
|
|
Сопротивление обмоток якоря, Ом |
|
|
Индуктивность якорной цепи, мГн |
|
|
Номинальная частота вращения, об/мин |
|
|
Максимальная частота вращения, об/мин |
|
4. Трехмассовая упругая система.

Рис. 1. Структурная схема трехмассовой упругой системы.
Трёхмассовая система позволяет достаточно подробно проследить как динамические так и статические особенности работы ЭП на достаточно высоком уровне, но сложности аналитического описания делают такую систему мало удобной, поэтому приведём систему к двухмасоовой.
5. Приведение к двухмассовой системе.
Рис.2. Эквивалентная расчетная схема двухмассовой упругой механической системы [2].
Момент инерции между первой и второй и между второй и третьей
массами соответственно:

 (5.1)
(5.1)

 (5.2)
(5.2)
Эквивалетный момент инерции первой и второй массы соотвктственно:
J1Э= J1+ J21 =0.432 (5.3)
J2Э= J2+ J23 =1.033 (5.4)
Жесткость механической связи:

 (5.5)
(5.5)
Соотношение масс:

 (5.6)
(5.6)
Резонансная частота системы:

 (5.7)
(5.7)
Логарифмический
декремент принимаем на уровне

Коэффициент сил вязкого трения, приведенный к двигателю:
 (5.8)
(5.8)
6.Математическая модель электромеханической системы подчинённого управления с упругой механической связью
На
рис. 3 показана принципиальная схема
исследуемой электромеханической
системы, в которой приняты следующие
обозначения: ТГ – тахогенератор ( –
напряжение ТГ,
–
напряжение ТГ, –
согласующее сопротивление для сигнала
обратной связи по скорости); ЭД –
электродвигатель (
–
согласующее сопротивление для сигнала
обратной связи по скорости); ЭД –
электродвигатель ( – частота вращения ЭД,
– частота вращения ЭД, –
ток якоря ЭД); Р – редуктор; ТП –
тиристорный преобразователь; ДТ –
датчик тока (
–
ток якоря ЭД); Р – редуктор; ТП –
тиристорный преобразователь; ДТ –
датчик тока ( ,
, – аналогично ТГ); БТО – блок
токоограничения;
– аналогично ТГ); БТО – блок
токоограничения; –
напряжение задания; РС – регулятор
скорости ( zрс
–
операторное сопротивление в цепи ОС
регулятора скорости,
–
напряжение задания; РС – регулятор
скорости ( zрс
–
операторное сопротивление в цепи ОС
регулятора скорости,
 –
согласующее сопротивление для входного
напряжения,
–
согласующее сопротивление для входного
напряжения, –
напряжение на выходе РС); РТ – регулятор
тока ( zрт,
–
напряжение на выходе РС); РТ – регулятор
тока ( zрт,
 ,
, – аналогично РС); СУ – система управления,
формирующая управляющие сигналы для
ТП;
– аналогично РС); СУ – система управления,
формирующая управляющие сигналы для
ТП; – жесткость механической связи между
ЭД и исполнительным механизмом.
– жесткость механической связи между
ЭД и исполнительным механизмом.

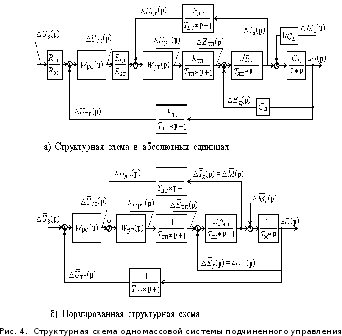
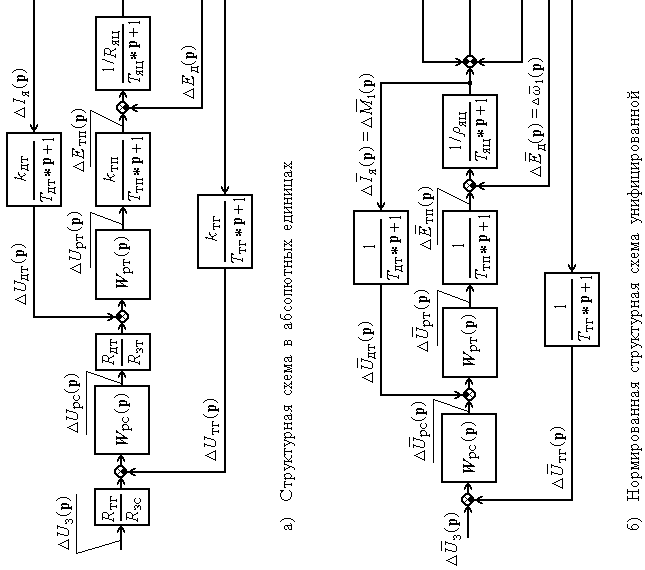
Расчетная
структурная схема в абсолютных единицах,
соответствующая исследуемой ЭМС (рис.
3), и НСС для одномассовой системы показана
на рис. 4. Аналогичные схемы для двухмассовой
ЭМС, учитывающие упругость механической
части электропривода, показаны на рис.
5. Приняты следующие обозначения:
 ,
, – соответственно, постоянные времени
датчика тока и тахогенератора;
– соответственно, постоянные времени
датчика тока и тахогенератора; – постоянная времени тиристорного
преобразователя;
– постоянная времени тиристорного
преобразователя; ,
, ,
, ,
, – коэффициенты передачи и нормированные
постоянные времени для регуляторов
тока и скорости;
– коэффициенты передачи и нормированные
постоянные времени для регуляторов
тока и скорости; ,
, – передаточные функции регуляторов
контуров скорости и тока;
– передаточные функции регуляторов
контуров скорости и тока; ,
Tя
–
нормированное значение сопротивления
и постоянная времени цепи якоря;
,
Tя
–
нормированное значение сопротивления
и постоянная времени цепи якоря;
 ,
В*с – коэффициент, определяющий
взаимосвязь между ЭДС двигателя и его
частотой вращения при постоянном
магнитном потоке, вычисляется по
паспортным данным электродвигателя.
,
В*с – коэффициент, определяющий
взаимосвязь между ЭДС двигателя и его
частотой вращения при постоянном
магнитном потоке, вычисляется по
паспортным данным электродвигателя.