

Пуск и реверсирование двигателей
Пуск асинхронных двигателей небольшой мощности осуществляется простым включением в сеть.
Для изменения направления вращения ротора (реверсирования) необходимо изменить направление вращения магнитного поля, для этого меняют порядок чередования фаз статора. В производственных условиях это достигается при помощи двух магнитных пускателей при их раздельном включении. Для проверки реверсирования в лабораторных условиях достаточно поменять местами два любые линейные провода от сети, которые подключаются к клеммам U1, V1, W1 (С1, С2, С3) клеммной коробки двигателя.
Регулирование частоты вращения ротора
Частота вращения ротора определяется выражением:
![]() или
или
![]()
Возможны три метода регулирования частоты вращения:
1. Изменением частоты питающего напряжения f при помощи тиристорных преобразователей частоты ТПЧ:
П ри
уменьшении частоты f1 < fн
снижается ω0,
а магнитный поток Ф увеличивается.
Это приводит к глубокому насыщению
магнитной цепи и увеличению намагничивающего
тока Im,
что вызывает снижение энергетических
показателей двигателя (cosφ и η). Для того,
чтобы поток Ф оставался постоянным,
необходимо при изменении частоты f1
в той же кратности изменять напряжение,
то есть U1/f1=const.
ри
уменьшении частоты f1 < fн
снижается ω0,
а магнитный поток Ф увеличивается.
Это приводит к глубокому насыщению
магнитной цепи и увеличению намагничивающего
тока Im,
что вызывает снижение энергетических
показателей двигателя (cosφ и η). Для того,
чтобы поток Ф оставался постоянным,
необходимо при изменении частоты f1
в той же кратности изменять напряжение,
то есть U1/f1=const.
На рис. 6.9 приведены механические характеристики асинхронного двигателя при частотном регулировании при U1/f1 = const, и где f1>f2>f3.
2. Изменением числа пар полюсов р.
Регулирование частоты вращения производится ступенчато и при постоянной мощности Р. Поэтому в производственных условиях этот способ находит ограниченное применение, в основном - в электроприводах металлорежущих станков, на судах и др.
3. Регулирование частоты вращения двигателя при изменении величины питающего напряжения. Этот способ связан со значительным уменьшением критического момента
МКРи = МКРе(U1/U1н)2,
при сохранении постоянным критического скольжения.
П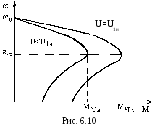 ри
уменьшении напряжения
можно
построить семейство механических
характеристик (рис 6.10)
с различным значением максимального
момента, но с постоянным значением
критического скольжения sКР.
ри
уменьшении напряжения
можно
построить семейство механических
характеристик (рис 6.10)
с различным значением максимального
момента, но с постоянным значением
критического скольжения sКР.
Кпд и потери мощности асинхронного двигателя c короткозамкнутым ротором
Асинхронный двигатель при работе потребляет из сети активную мощность P1 = 3U1фI1фcos1=√3U1ЛI1Лcos1,
где U1ф– действующее значение фазного напряжения сети;
I1ф– ток обмотки статора;
cos1– коэффициент мощности;
U1Л– действующее значение линейного напряжения;
I1Л – линейный ток.
Часть этой мощности теряется в виде
электрических потерь в активном
сопротивлении обмотки статора (потери
в меди статора) ΔPм1= 3r1![]() .
.
Часть мощности расходуется на потери в стали сердечника ротора ΔРс.
Оставшаяся часть мощности передается через воздушный зазор на ротор и называется электромагнитной мощностью ΔPэм= P1– ΔРм1– ΔРс,
Эта мощность за вычетом потерь в активном
сопротивлении обмотки ротора преобразуется
в механическую мощность на валу двигателя
![]() .
.
Часть механической мощности теряется внутри двигателя в виде механических потерь ΔРмех. Это потери на трение в подшипниках, вентиляцию. Здесь же необходимо учесть и другие потери, которые называются добавочными – ΔРдоб.
Полезная мощность на валу равна
![]() или
или
P = Pмех–ΔРмех– ΔРдоб.
В номинальном режиме:
активная мощность, потребляемая из сети
![]() ;
;
мощность
на валу двигателя
![]() ,
где
,
где![]()
или
![]() ;
;
номинальный
коэффициент полезного действия
![]() .
.
Номинальный КПД асинхронных двигателей имеет величину 0,7-0,95. Малые значения КПД относятся к двигателям малой мощности, большие - к двигателям большой мощности. Максимальное значение КПД соответствует нагрузке, близкой к номинальной.