

Вращающий момент
Вращающееся магнитное поле, пересекая стержни ротора асинхронного двигателя, индуцирует в них ЭДС. Под действием наведенной ЭДС в роторной обмотке возникает ток i2. Если принять во внимание, что ротор относительно магнитного поля перемещается в сторону, противоположную направлению его вращения, то направление этих ЭДС и тока в проводнике можно определить по «правилу правой руки».
Пусть, магнитный поток Ф направлен, как показано на рис. 6.7. Магнитное поле вращается со скоростью n0 по направлению вращения часовой стрелки. Тогда проводники обмотки ротора перемещаются относительно этого магнитного поля в сторону, противоположную его вращения, то есть против направления вращения часовой стрелки. Проводники обмотки ротора пересекаются линиями магнитного поля и в них индуцируется ЭДС е2, направление которой определяется «правилом правой руки»: правая рука располагается так, чтобы линии магнитного поля входили в ладонь, большой, отогнутый на 90°, палец направляется в сторону перемещения проводника, тогда четыре пальца покажут направление ЭДС.
П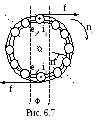 роводники
ротора замкнуты друг на друга и под
действием ЭДС е2
по ним будут протекать токи i2.
Направление ЭДС и тока i2
показаны на рис. 6.7.
роводники
ротора замкнуты друг на друга и под
действием ЭДС е2
по ним будут протекать токи i2.
Направление ЭДС и тока i2
показаны на рис. 6.7.
На проводник ротора с током i2 со стороны магнитного поля статора действует сила Ампера f, направленная по касательной к окружности ротора (рис. 6.8), направление которой определяется по «правилу левой руки»: левая рука располагается так, чтобы линии магнитного поля входили в ладонь, четыре пальца направляются по току в проводнике, тогда большой палец, отогнутый на 90°, покажет направление силы. Величина этой силы
![]() ,
,
где l2 – длина проводника ротора, расположенного в магнитном поле.
Общую силу, действующую на ротор, найдем, умножив среднюю силу на число проводников обмотки ротора N2:
![]() .
.
Вращающий момент равен произведению силы F на плечо D/2:
![]() ,
,
где D – диаметр ротора.
Под воздействием вращающего момента начинается разгон ротора. Переходные электромагнитные и электромеханические процессы в двигателе закончатся при достижении устойчивого равновесия между вращающим моментом и моментом сил сопротивления, созданными приводными механизмами. При этом условии ротор будет вращаться со скоростью n.
Основным
условием работы двигателя является
асинхронность
(неравенство) частот вращения ротора и
магнитного поля
(в двигателях
![]() ),так
как только в этом случае возможно
индуцирование ЭДС и возникновение
тока в обмотке ротора, следовательно,
образование вращающего
момента.
),так
как только в этом случае возможно
индуцирование ЭДС и возникновение
тока в обмотке ротора, следовательно,
образование вращающего
момента.
При неравенстве частот ротор при своем вращении скользит по магнитному полю. Скольжение ротора
![]()
где ω0, ω [рад/сек]- угловые частоты вращения магнитного поля и ротора;
n0, n[об/мин]- частоты вращения магнитного поля и ротора.
Механическая характеристика
Механической характеристикой асинхронного двигателя принято называть зависимость электромагнитного момента М от скольжения M=f(s) или n=f(M).
Для двигателей средней и большой мощности механическую характеристику строят по упрощенной формуле Клосса, позволяющей использовать паспортные данные двигателя
 ,
,
где Мк – критический или максимальный момент двигателя;
sк – критическое скольжение.
На рис. 6.8 показана естественная механическая характеристика асинхронного двигателя.
В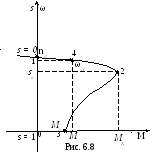 режиме идеального холостого хода (приМ
=
0) и пренебрежении
моментом холостого хода, обусловленным
механическими и магнитными
потерями в двигателе, частота вращения
ротора
режиме идеального холостого хода (приМ
=
0) и пренебрежении
моментом холостого хода, обусловленным
механическими и магнитными
потерями в двигателе, частота вращения
ротора
![]() ,
,![]() а
скольжение s
= 0.
а
скольжение s
= 0.
При
неподвижном роторе при пуске
![]() и
скольжениеs
= 1. Таким
образом, в двигательном режиме частота
вращения ротора и его скольжение
изменяются в пределах
и
скольжениеs
= 1. Таким
образом, в двигательном режиме частота
вращения ротора и его скольжение
изменяются в пределах
![]() ;
;![]() ;
;
![]() .
Частота
вращения ротора
.
Частота
вращения ротора
ω = ω0 (1 - s); n = n0 (1 - s).