

3. Выбор вариантазаданИя
И
Рис.
1.
3.1. Схема зубчатого механизма, приводящего в движение рычажный и кулачковый механизмы, изображена на рис. 1 Исходные данные для расчета берутся из таблиц 1, 2 и 4.
Номер
![]() части строки таблицы 1, задающей схему
и входное звено ЗМ, определяются числом
части строки таблицы 1, задающей схему
и входное звено ЗМ, определяются числом
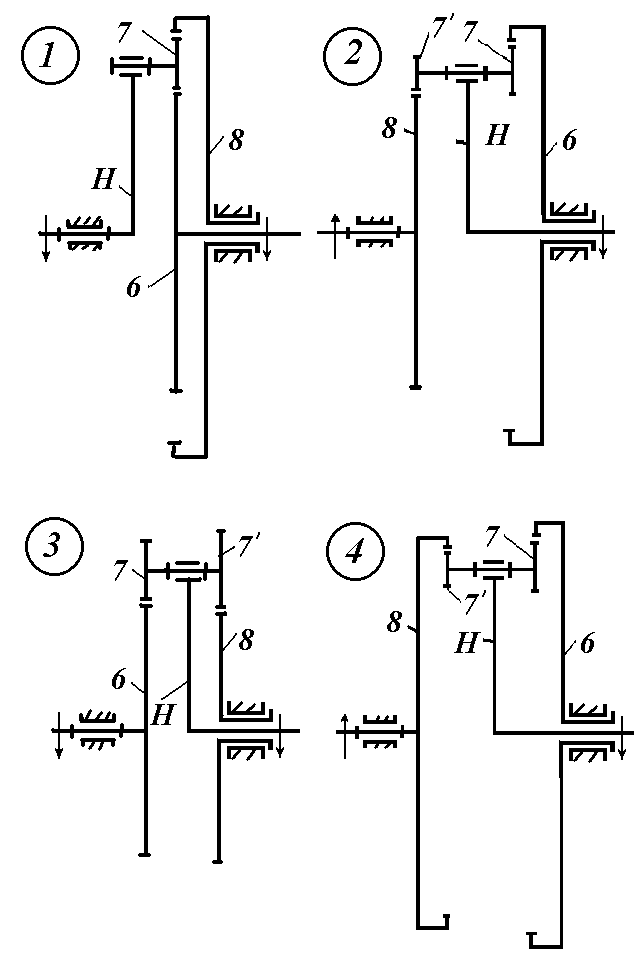
Номера схемы ЗМ и его закрепленного звена приведены в таблице 1 (колонки 8 и 9), а изображения кинематических схем ЗМ – на рис. 2. На этом рисунке показаны дифференциальные механизмы, из которых планетарный механизм получается закреплением одного из колес – шестого или восьмого. Таблица 4 содержит прочие данные для расчета кинематики зубчатой передачи (рис. 1). Направление резьбы винта 5 и червяка 3 заданы буквами П или Л: П – винт или червяк правый; Л – левый.
У
Рис.
2![]() (об/мин) выбирается из таблицы 1. При
четномМ
вал двигателя вращается против хода
часовой стрелки, если смотреть на
двигатель со стороны зубчатого
планетарного механизма ЗМ. При нечетном
М вал
двигателя вращается по ходу часовой
стрелки.
(об/мин) выбирается из таблицы 1. При
четномМ
вал двигателя вращается против хода
часовой стрелки, если смотреть на
двигатель со стороны зубчатого
планетарного механизма ЗМ. При нечетном
М вал
двигателя вращается по ходу часовой
стрелки.
 Вал
двигателя должен соединятся с наиболее
быстро вращающимся валом ЗМ, а выходным
звеном ЗМ должен быть наиболее медленно
вращающийся вал.
Вал
двигателя должен соединятся с наиболее
быстро вращающимся валом ЗМ, а выходным
звеном ЗМ должен быть наиболее медленно
вращающийся вал.
В зависимости от типа движения входного звена рычажного механизма оно соединяется либо с валом червяка 3, либо с гайкой 6 винтовой передачи.
Шаг винта 5 принять равным 10 мм. Числа заходов червяка и винта равны соответственно Z3 и Z5.
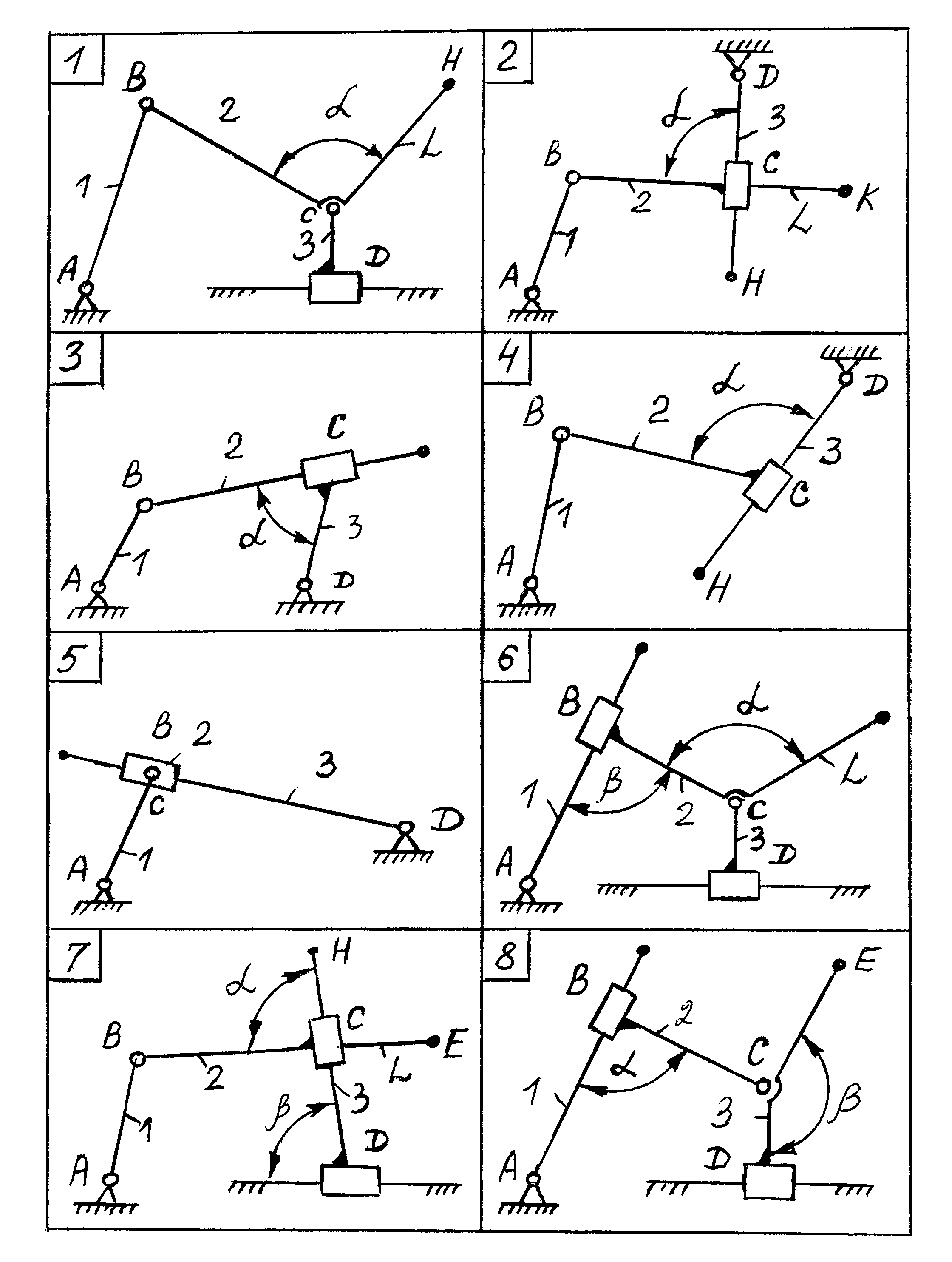
3.2. Номер M1 кинематической схемы рычажного механизма, изображенной в таблице 3, определяется по номеру М и таблице 1.
Исходные данные для расчета рычажного механизма берутся из таблиц 1 - 2, в которых приняты следующие обозначения.
Номер М1 кинематической схемы рычажного механизма, изображенной в таблице 4, берется из столбца 2 таблицы 1.
Номер входного звена определяется столбцом 3. Если входное звено имеет номер 1, то выходное звено имеет номер 3. Если входное звено имеет номер 3, то выходное звено имеет номер 1.
Коэффициент KQ полезной нагрузки, используемый для определения силы или момента сил полезного сопротивления, приложенных к выходному звену рычажного механизма. KQ, измеряется в метрах, если выходное звено вращается и является безразмерным в противном случае.
Обобщенная координата q измеряется в см если входное звено движется поступательно и в градусах, если входное звено вращается.
Таблица 1
|
М |
М1 |
№ вх. звена |
KQ |
q |
Д (об/мин) |
N |
№ схемы зуб. мех. |
№ закр. Звена |
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
|
1 |
1 |
1 |
1,2 |
60 |
720 |
1 |
3 |
6 |
|
2 |
1 |
3 |
1,5 |
24 |
1500 |
2 |
4 |
8 |
|
3 |
2 |
1 |
0,8 |
45 |
900 |
3 |
1 |
6 |
Окончание таблицы 1
|
4 |
2 |
3 |
1,4 |
280 |
750 |
4 |
1 |
8 |
|
5 |
3 |
1 |
1,0 |
50 |
300 |
5 |
2 |
6 |
|
6 |
3 |
3 |
1,2 |
60 |
150 |
6 |
3 |
8 |
|
7 |
4 |
1 |
1,0 |
70 |
900 |
7 |
4 |
6 |
|
8 |
4 |
3 |
1,2 |
225 |
1000 |
8 |
1 |
8 |
|
9 |
5 |
1 |
1,0 |
60 |
720 |
9 |
2 |
6 |
|
10 |
5 |
3 |
1,5 |
150 |
1000 |
10 |
3 |
8 |
|
11 |
6 |
1 |
1,2 |
55 |
700 |
11 |
1 |
6 |
|
12 |
6 |
3 |
0,8 |
22 |
960 |
12 |
2 |
8 |
|
13 |
7 |
1 |
0,4 |
80 |
800 |
13 |
3 |
6 |
|
14 |
7 |
3 |
0,8 |
40 |
1000 |
14 |
1 |
8 |
|
15 |
8 |
1 |
1,0 |
60 |
1200 |
15 |
1 |
8 |
|
16 |
8 |
3 |
1,2 |
20 |
1500 |
16 |
2 |
6 |
|
17 |
9 |
1 |
0,6 |
85 |
1200 |
17 |
3 |
6 |
|
18 |
9 |
3 |
1,0 |
30 |
720 |
18 |
4 |
8 |
|
19 |
10 |
1 |
0,6 |
80 |
940 |
19 |
1 |
6 |
|
20 |
10 |
3 |
0,9 |
32 |
700 |
20 |
1 |
8 |
|
21 |
11 |
1 |
0,7 |
75 |
1200 |
21 |
2 |
6 |
|
22 |
11 |
3 |
1,0 |
30 |
760 |
22 |
3 |
8 |
|
23 |
12 |
1 |
1,2 |
90 |
1000 |
23 |
4 |
6 |
|
24 |
12 |
3 |
0,8 |
110 |
1500 |
24 |
1 |
8 |
|
25 |
13 |
1 |
0,9 |
60 |
1200 |
25 |
2 |
6 |
|
26 |
13 |
3 |
1,0 |
70 |
780 |
26 |
3 |
8 |
|
27 |
14 |
1 |
0,8 |
60 |
1500 |
27 |
1 |
6 |
|
28 |
14 |
3 |
1,0 |
25 |
900 |
28 |
2 |
8 |
|
29 |
15 |
1 |
1,5 |
60 |
700 |
29 |
3 |
8 |
|
30 |
15 |
3 |
0,8 |
40 |
1500 |
30 |
1 |
6 |
|
31 |
16 |
1 |
1,0 |
70 |
800 |
31 |
1 |
6 |
|
32 |
16 |
3 |
1,2 |
26 |
1000 |
32 |
2 |
8 |
Таблица 2
|
N |
Z1 |
Z2 |
Z3 |
Напр. зуба |
Z4 |
Z5 |
Напр. резьбы |
Z6 |
Z7 |
Z7’ |
Z8 |
|
1 |
18 |
54 |
3 |
Л |
66 |
2 |
Л |
60 |
18 |
50 |
28 |
|
2 |
19 |
36 |
2 |
П |
58 |
1 |
П |
120 |
20 |
30 |
130 |
|
3 |
20 |
50 |
1 |
Л |
40 |
2 |
Л |
50 |
18 |
- |
86 |
|
4 |
17 |
38 |
2 |
П |
64 |
1 |
П |
50 |
18 |
- |
86 |
|
5 |
22 |
47 |
1 |
Л |
50 |
2 |
Л |
104 |
24 |
20 |
60 |
|
6 |
18 |
33 |
2 |
П |
64 |
1 |
Л |
60 |
20 |
50 |
30 |
|
7 |
19 |
37 |
1 |
Л |
48 |
2 |
П |
180 |
30 |
18 |
168 |
|
8 |
21 |
44 |
2 |
П |
72 |
1 |
П |
60 |
20 |
- |
100 |
|
9 |
20 |
30 |
1 |
Л |
54 |
2 |
П |
94 |
18 |
26 |
50 |
|
10 |
18 |
32 |
2 |
П |
40 |
1 |
Л |
70 |
30 |
20 |
80 |
|
11 |
17 |
22 |
1 |
Л |
48 |
2 |
П |
80 |
18 |
- |
116 |
|
12 |
18 |
30 |
2 |
П |
60 |
1 |
Л |
104 |
24 |
40 |
40 |
|
13 |
19 |
37 |
1 |
Л |
38 |
2 |
П |
80 |
30 |
20 |
90 |
|
14 |
20 |
50 |
2 |
П |
44 |
2 |
Л |
70 |
17 |
- |
104 |
|
15 |
17 |
35 |
1 |
Л |
50 |
2 |
П |
40 |
20 |
- |
80 |
|
16 |
18 |
72 |
2 |
П |
60 |
1 |
Л |
100 |
30 |
20 |
50 |
|
17 |
18 |
54 |
3 |
П |
66 |
2 |
Л |
60 |
18 |
50 |
28 |
|
18 |
19 |
36 |
2 |
П |
58 |
1 |
П |
120 |
20 |
30 |
130 |
|
19 |
20 |
50 |
1 |
Л |
40 |
2 |
Л |
50 |
18 |
- |
86 |
|
20 |
17 |
38 |
2 |
П |
64 |
1 |
П |
50 |
18 |
- |
86 |
|
21 |
22 |
47 |
1 |
Л |
50 |
2 |
Л |
104 |
24 |
20 |
60 |
|
22 |
18 |
33 |
2 |
Л |
64 |
1 |
П |
60 |
20 |
50 |
30 |
|
23 |
19 |
37 |
1 |
П |
48 |
2 |
Л |
180 |
30 |
18 |
168 |
|
24 |
21 |
44 |
2 |
П |
72 |
1 |
П |
60 |
20 |
- |
100 |
|
25 |
20 |
30 |
1 |
П |
54 |
2 |
Л |
94 |
18 |
26 |
50 |
|
26 |
18 |
32 |
2 |
Л |
40 |
1 |
П |
70 |
30 |
20 |
80 |
|
27 |
17 |
22 |
1 |
П |
48 |
2 |
Л |
80 |
18 |
- |
116 |
|
28 |
18 |
30 |
2 |
Л |
60 |
1 |
П |
104 |
24 |
40 |
40 |
Окончание таблицы 2
|
29 |
19 |
37 |
1 |
П |
38 |
2 |
Л |
80 |
30 |
20 |
90 |
|
30 |
20 |
50 |
2 |
Л |
44 |
2 |
П |
70 |
17 |
- |
104 |
|
31 |
17 |
35 |
1 |
П |
50 |
2 |
П |
40 |
20 |
- |
80 |
|
32 |
18 |
72 |
2 |
Л |
60 |
1 |
П |
100 |
30 |
20 |
50 |
Система координат механизма имеет начало в точке А: ось Х – направлена горизонтально вправо, а ось У – вертикально вверх.
Если точка механизма неподвижна, то ее положение задается координатами, указанными в соответствующих колонках таблицы 2: левый столбец – абсциссы, правый – ординаты в см.
Таблица 3
|
M1 |
Положение точки D |
Углы в град. |
Длины (см) | |||||
|
|
|
|
|
l1 |
l2 |
l3 |
lL | |
|
1 |
0 |
0 |
100 |
- |
30 |
28 |
15 |
30 |
|
2 |
20 |
40 |
90 |
- |
12 |
20 |
50 |
20 |
|
3 |
20 |
0 |
50 |
- |
14 |
40 |
20 |
- |
|
4 |
50 |
40 |
135 |
- |
18 |
25 |
60 |
- |
|
5 |
50 |
0 |
- |
- |
28 |
- |
70 |
- |
|
6 |
0 |
0 |
120 |
90 |
40 |
16 |
15 |
30 |
|
7 |
0 |
0 |
80 |
70 |
20 |
35 |
70 |
12 |
|
8 |
0 |
0 |
90 |
150 |
60 |
20 |
16 |
16 |
|
9 |
0 |
0 |
150 |
- |
30 |
28 |
38 |
12 |
|
10 |
0 |
0 |
30 |
- |
30 |
30 |
20 |
25 |
|
11 |
25 |
0 |
60 |
- |
30 |
22 |
50 |
- |
|
12 |
25 |
0 |
- |
- |
16 |
20 |
30 |
30 |
|
13 |
30 |
0 |
30 |
- |
20 |
30 |
24 |
25 |
|
14 |
5 |
0 |
120 |
- |
40 |
25 |
15 |
32 |
|
15 |
-50 |
0 |
90 |
- |
60 |
20 |
16 |
- |
|
16 |
0 |
0 |
60 |
80 |
60 |
25 |
16 |
18 |
 Таблица
4
Таблица
4
 Окончание
таблицы 4
Окончание
таблицы 4
Для определения положений звеньев, движущихся поступательно относительно стойки, используется вспомогательная система координат x1O1y1, ось у1 которой проходит через точку А перпендикулярно линии движения звена относительно стойки и направлена к точке А, а ось х1 – так, чтобы система координат была правой. Начало отсчета О1 этой системы координат находится на пересечении оси у1 с линией движения.
Если точка механизма движется поступательно относительно стойки, то столбцы таблицы 2, соответствующие этой точке, задают линию движения: левый задает ординату в см точки А в системе x1O1y1, а правый – угол в градусах, образуемый осью x1 с осью х. Угол отсчитывается против хода часовой стрелки от оси х до оси x1.
Если входное звено вращается относительно стойки, то угол q отсчитывается от оси х до оси входного звена против хода часовой стрелки.
Для определения положения поступательно движущегося входного звена используется вспомогательная система координат x1O1y1. В подобной системе координат q является координатой X 1 центра ползуна входного звена, образующего кинематическую пару со стойкой.
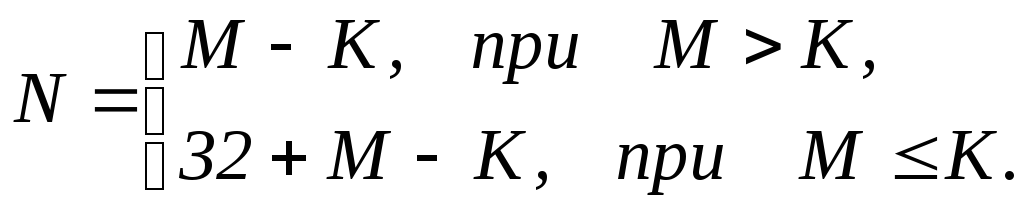
Если
число
![]() -
четное, то входное звено рычажного
механизма движется в сторону увеличенияq,
а при нечетном М
в противоположном направлении.
-
четное, то входное звено рычажного
механизма движется в сторону увеличенияq,
а при нечетном М
в противоположном направлении.
Углы и заданы в градусах и определяют положение частей некоторых звеньев механизма, состоящих из нескольких жестко соединенных между собой стержней, друг относительно друга.
Величины
l1,
l2,
l3,
измеряемые в см, задают длины прямых
звеньев или их частей, помеченных на
кинематических схемах механизмов (табл.
4)
цифрами
1,
2,
3.
Длины
![]() LL
задают
длины частей звеньев, помеченных буквой
L.
LL
задают
длины частей звеньев, помеченных буквой
L.
Для силового расчета механизма используется погонная масса звеньев m (кг/м), задаваемая преподавателем.
Массы звеньев, являющихся стержнями, определяются по формуле Mi = m Li, где Li – суммарная длина (в м) всех частей звена.
Величина Li= li для прямых звеньев, Li= li+lL – для звеньев, состоящих из двух частей и сумме длин сторон треугольника, если звено образовано тремя стержнями. Если длина звена не задана, то звено считается ползуном независимо от того, как оно изображается на схеме Для звеньев – ползунов массы следует принимать численно равными m.
Нагрузка Q полезного сопротивления приложена к выходному звену в его центре масс и направлена так, чтобы ее работа на перемещении места приложения нагрузки Q к выходному звену была отрицательна. Нагрузка полезного сопротивления определяется по формуле
Q= KQ m g,
где KQ – коэффициент, задаваемый таблицей 1; m – масса выходного звена в кг; g = 9.81 м/с2.