

Экзаменационный билет № 1
Построение синтезатора частот по методу синтеза (интерполяционная и компенсационная схема).
2.Назначение, принцип действия и классификация систем автоматической подстройки частоты. Общие сведения об автоматической регулировке усиления
1.
Синтезом частот называется формирование
дискретного множества частот из
одной или нескольких опорных частот
![]() (рис. 57). Опорной называется высокостабильная
частота автогенератора, обычно кварцевого.
(рис. 57). Опорной называется высокостабильная
частота автогенератора, обычно кварцевого.
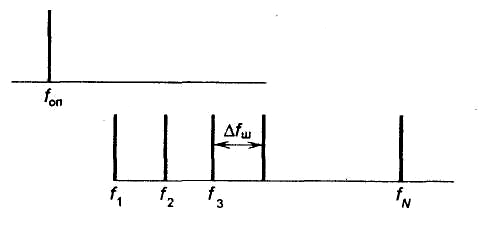
Рис. 57
Синтезатором частот называется устройство, реализующее процесс синтеза. Синтезатор является непременной частью современных радиопередатчиков и радиоприемников систем радиосвязи, радионавигации, радиолокации и другого назначения.
В настоящее время основной способ построения синтезатора основывается на применении схемы импульсно-фазовой автоподстройки частоты и элементов вычислительной техники.
Например, используя принцип многократной интерполяции, можно создать СЧ, в котором вспомогательные частоты получают не от кварцевых ИГ, а от одного ОГ, частота которого подвергается необходимым преобразованиям.
Существует много вариантов построения аналоговых СЧ для получения сетки выходных частот методом прямого синтеза. Например, используя принцип многократной интерполяции, можно создать СЧ, в котором вспомогательные частоты получают не от кварцевых ИГ, а от одного ОГ, частота которого подвергается необходимым преобразованиям. Широкое распространение нашли СЧ, построенные по принципу декадного набора частот, который сводится к следующим последовательным операциям:
от ОГ с частотой
 ,
кратной 10, получают ряд гармонических
составляющих;
,
кратной 10, получают ряд гармонических
составляющих;одну из гармоник выбирают декадным переключателем частоты, имеющим 10 положений (от 0 до 9);
выбранную составляющую частоты складывают с уменьшенной в 9 раз частотой опорного колебания; при этом необходимо, чтобы первая цифра числового выражения суммарной частоты соответствовала номеру положения декадного переключателя;
частоту суммарного колебания делят на 10, что переводит введенную цифру на порядок ниже;
колебание с этой частотой используют как опорное для следующего аналогичного блока (декады) СЧ, в котором осуществляются выбор своей гармонической составляющей ОГ и сложение ее с колебанием от предыдущей декады; при этом в новом суммарном колебании номер положения переключателя данной декады соответствует первой цифре числового значения суммарной частоты;
частоту суммарного колебания опять делят на 10, полученное колебание используют как опорное для следующей декады и т. д.
Построенный по такому принципу СЧ обеспечивает на своем выходе колебание с частотой, значение которой совпадает с показателями декадных переключателей. Принцип работы такого СЧ поясним с помощью схемы рис. 59.
Высокостабильный
ОГ работает на частоте
![]() В
ГГ образуется десять опорных частот
В
ГГ образуется десять опорных частот![]() ,
кратных частоте
,
кратных частоте![]() .
Опорные частоты связаны с
.
Опорные частоты связаны с![]() соотношением
соотношением![]() ,
гдеn=0,
1, 2,…,9. С помощью декадных переключателей
П1 … П9 (в общем случае их может быть
произвольное число k)
можно подать на соответствующий
преобразователь частоты одну из частот
,
гдеn=0,
1, 2,…,9. С помощью декадных переключателей
П1 … П9 (в общем случае их может быть
произвольное число k)
можно подать на соответствующий
преобразователь частоты одну из частот
![]() .
При этом номер переключателя П должен
совпадать с номером частоты, которую
он выбирает. Так, если П стоит в положении
.
При этом номер переключателя П должен
совпадать с номером частоты, которую
он выбирает. Так, если П стоит в положении![]() ,
то это означает, что на его выходе
действует напряжение с частотой
,
то это означает, что на его выходе
действует напряжение с частотой![]() и
т. д. Напряжение с выхода П подается на
преобразовательПр,
на который поступает второе напряжение:
для Пр1 – это напряжение с частотой
и
т. д. Напряжение с выхода П подается на
преобразовательПр,
на который поступает второе напряжение:
для Пр1 – это напряжение с частотой
![]() для
всех остальных преобразователей Пр2.
ПрК – это напряжение с выхода предыдущей
декады. Полосовые фильтры
для
всех остальных преобразователей Пр2.
ПрК – это напряжение с выхода предыдущей
декады. Полосовые фильтры![]() выделяют суммарное по частоте напряжение
с выхода преобразователей.
После
фильтрации частота выделенного напряжения
делится на 10 и полученное напряжение
используется как опорное для следующей
декады.
выделяют суммарное по частоте напряжение
с выхода преобразователей.
После
фильтрации частота выделенного напряжения
делится на 10 и полученное напряжение
используется как опорное для следующей
декады.

Рис. 59
Частота колебаний
па выходе делителя Д1 первой декады
равна
![]() ,
с учетом значения
,
с учетом значения![]() получаем
получаем![]() .
На выходе делителя Д2 второй декады
частота колебания равна
.
На выходе делителя Д2 второй декады
частота колебания равна![]() .
Аналогично, выходная частота СЧ:
.
Аналогично, выходная частота СЧ:
![]() ,
(116)
,
(116)
где k
– число декад, а
![]() =0,
1, 2, ..., 9 – номер положения переключателя
=0,
1, 2, ..., 9 – номер положения переключателя![]() .
Положим, что такой СЧ имеет пять декад,
т. е.k
=5. Для наглядности будем считать, что
частота
.
Положим, что такой СЧ имеет пять декад,
т. е.k
=5. Для наглядности будем считать, что
частота
![]() МГц, другими словами, на выходе ГГ
действует десять гармоник ОГ — от первой
до десятой. Тогда:
МГц, другими словами, на выходе ГГ
действует десять гармоник ОГ — от первой
до десятой. Тогда:
![]()
![]() .
(117)
.
(117)
Если все переключатели установить в положения n=1, то минимальная частота на выходе СЧ будет равной 1,1111 МГц, при этом значение этой частоты совпадает с номерами показаний переключателей П. Если все П установить в положения n=9, то
![]() 9,9999 МГц. Нетрудно
показать, что устанавливая переключатели
П в любые положения от n
= 1 до n
= 9, будем получать колебания на выходе
СЧ, значения частот которых совпадают
с положениями декадных переключателей
П. Шаг перестройки в рассмотренном
примере составляет 100 Гц. В общем случае
шаг перестройки частоты на выходе СЧ,
построенного по схеме рис. 60, равен
9,9999 МГц. Нетрудно
показать, что устанавливая переключатели
П в любые положения от n
= 1 до n
= 9, будем получать колебания на выходе
СЧ, значения частот которых совпадают
с положениями декадных переключателей
П. Шаг перестройки в рассмотренном
примере составляет 100 Гц. В общем случае
шаг перестройки частоты на выходе СЧ,
построенного по схеме рис. 60, равен
![]() .
Отсюда видно, что с увеличением числа
декад шаг перестройки делается все
меньше.
.
Отсюда видно, что с увеличением числа
декад шаг перестройки делается все
меньше.
Преимуществом СЧ, построенных по методу прямого синтеза, является теоретически неограниченная возможность уменьшения шага перестройки за счет увеличения числа декад. К тому же имеется возможность построить СЧ с многократным использованием однотипных узлов и блоков, что снижает стоимость изготовления СЧ, упрощает его настройку, ремонт и эксплуатацию. Построенные по методу прямого синтеза СЧ включают большое число пассивных узлов, однако их инерционность сравнительно невелика, что позволяет реализовать малое время установления требуемой частоты выходного колебания.
Основной недостаток СЧ, построенных по методу прямого синтеза, состоит в трудности получения высокой спектральной чистоты выходного колебания. Более высокую спектральную чистоту выходного колебания можно реализовать в СЧ, построенных по методу косвенного синтеза частот. Как уже говорилось, в СЧ, построенных по методу косвенного синтеза, для фильтрации требуемого колебания применяется либо кольцо компенсации, либо кольцо ФАПЧ. В РПУ метод компенсации (или, как говорят, принцип “стабилидина” удачно сочетается с двойным преобразованием частоты принимаемого сигнала. Этот принцип широко используется в РПУ; так, он нашел применение в ряде приемников фирмы “Ракал”, в РПУ ЕС 958/7. Принцип “стабилидина” поясним с помощью рис. 60.
Путем преобразования
колебания ОГ в ГГ получают большое число
гармоник частоты. Эти гармоники совместно
с частотой первого гетеродина преобразуются
в ПрЗ в ряд комбинационных частот, одна
из которых, а именно
![]() ,
выделяется фильтром Ф1. При этом номер
гармоникиn,
как правило, определяет номер рабочего
поддиапазона. Напряжение с выхода Ф1
смешивается
в Пр4 с колебанием ИГ.
Фильтр Ф2 выделяет колебание
с частотой
,
выделяется фильтром Ф1. При этом номер
гармоникиn,
как правило, определяет номер рабочего
поддиапазона. Напряжение с выхода Ф1
смешивается
в Пр4 с колебанием ИГ.
Фильтр Ф2 выделяет колебание
с частотой
![]() которое используется
в качестве
напряжения второго гетеродина. Вторая
ПЧ
которое используется
в качестве
напряжения второго гетеродина. Вторая
ПЧ![]() .
.
Таким образом, нестабильность частоты и неточность настройки первого гетеродина в приемнике, построенном по принципу стабилидина, после двух преобразований частоты компенсируется. Источником нестабильности в приемнике остаются ОГ и ИГ. Отметим, что в рассмотренной схеме колебания первого гетеродина отличаются достаточно высокой спектральной чистотой, что уменьшает возможность возникновения паразитных каналов при приеме.

Рис. 60
В рассмотренной схеме частота первого гетеродина определяет номер рабочего поддиапазона, т. е. обеспечивает настройку приемника с шагом, равным частотному интервалу поддиапазона. Если использовать принцип стабилидина дважды или более, то шаг настройки можно сделать настолько малым, что отпадает необходимость в ИГ.
В качестве примера
рассмотрим, как используется метод
компенсации в РПУ «Арена». Синтезатор
этого приемника обеспечивает в пределах
1,5 ... 29,9999 МГц 285000 фиксированных настроек
с частотным интервалом в 100 Гц и со
стабильностью
![]() .
Настройка осуществляется шестью ручками
– по числу знаков цифрового значения
частоты. Синтезатор частот (рис. 61)
предназначен для работы в компенсационной
системе стабилизации частоты первого
гетеродина. Напряжение первого гетеродина
помимо преобразователя частоты Пр1
поступает через буферный каскад в блок
преобразования частоты (БПЧ) первого
гетеродина, где частота преобразуется
в частоту, лежащую в диапазоне 56 ... 66
МГц. Полученное напряжение поступает
в синтезатор, где частота его преобразуется
в частоту второго гетеродина
.
Настройка осуществляется шестью ручками
– по числу знаков цифрового значения
частоты. Синтезатор частот (рис. 61)
предназначен для работы в компенсационной
системе стабилизации частоты первого
гетеродина. Напряжение первого гетеродина
помимо преобразователя частоты Пр1
поступает через буферный каскад в блок
преобразования частоты (БПЧ) первого
гетеродина, где частота преобразуется
в частоту, лежащую в диапазоне 56 ... 66
МГц. Полученное напряжение поступает
в синтезатор, где частота его преобразуется
в частоту второго гетеродина![]() =
1094 кГц. При отклонении частоты первого
гетеродина от номинальной одновременно
изменяются частоты первой ПЧ и второго
гетеродина, при этом вторая ПЧ остается
постоянной. Ширина полосы канала
компенсации 9 кГд. На рисунке И –
исказитель.
=
1094 кГц. При отклонении частоты первого
гетеродина от номинальной одновременно
изменяются частоты первой ПЧ и второго
гетеродина, при этом вторая ПЧ остается
постоянной. Ширина полосы канала
компенсации 9 кГд. На рисунке И –
исказитель.
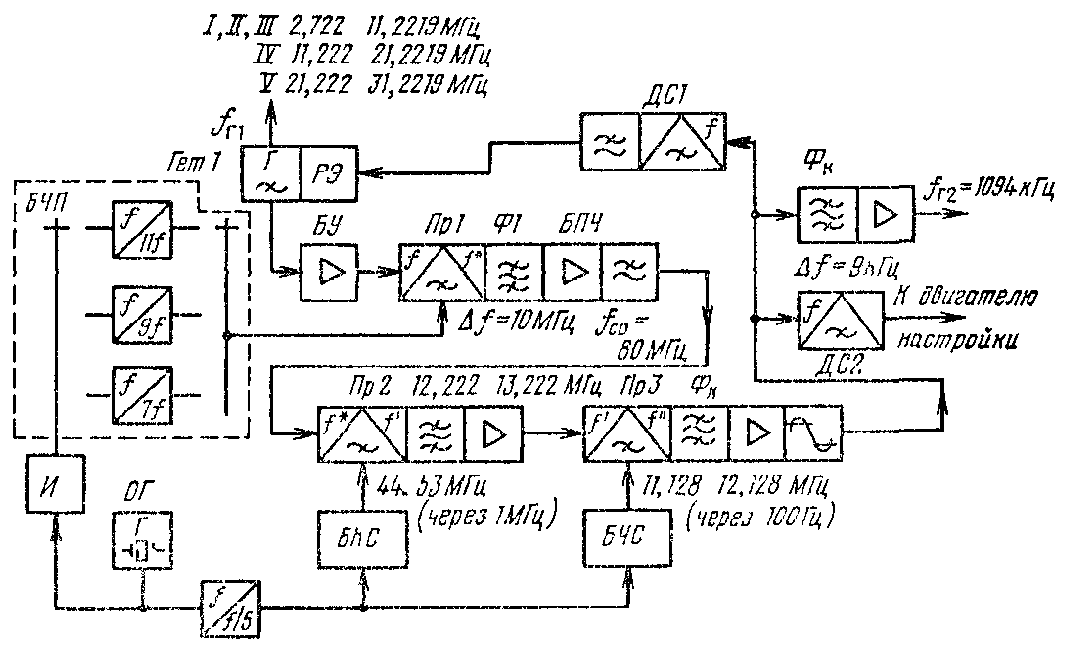
Рис. 61
Для преобразования частоты первого гетеродина в диапазон входных частот синтезатора 56,222 ... 66,222 МГц на БПЧ подаются частота первого гетеродина в диапазоне 2,722 ... 31,222 МГц и частоты “подставок” 55, 45, 35 МГц, которые формируются в блоке частотных “подставок” БЧП из 1-частоты опорного генератора. Частоты подставок подаются на Пр1 БПЧ. При работе на I...III поддиапазонах поступает частота 55 МГц, на IV – 45 МГц, на V – 35 МГц. После фильтрации и выравнивания колебания поступают с БПЧ на Пр2 СЧ, на другой вход Пр2 из блока крупной сетки частот БКС подается напряжение одной из частот в диапазоне 44 ... 53 МГц, кратное 1 МГц. Управление частотами производится с помощью переключателя х 1 МГц через диодную матрицу.
В результате
преобразования в Пр2 диапазон частот
56,222 ... 66,222 МГц приводится к диапазону
12,222
13,222 МГц. далее после усиления
напряжения происходит преобразование
в ПрЗ, при этом диапазон частот 12,222 ...
13,222 МГц с помощью дискретных эталонных
частот 11,128 ... 12,1279 МГц, кратных 100 Гц и
формируемых в блоке частой сетки частот
БЧС, приводится к частоте 1094 кГц.
Управление частотой БЧС производится
с помощью переключателей: х 100 кГц, х 10
кГц, х 1 кГц, х 100 Гц. Напряжение частоты
![]() подвергается фильтрации и поступает
на Пр2 ГТП, а также на дискриминаторы
ДС1 и ДС2. Первый из них служит для
получения управляющих напряжений для
цепи автопоиска и электронной
автоподстройки частоты первого
гетеродина, второй обеспечивает уточнение
настройки преселектора приемника путем
воздействия на двигатель, вращающий
конденсатор переменной емкости.
подвергается фильтрации и поступает
на Пр2 ГТП, а также на дискриминаторы
ДС1 и ДС2. Первый из них служит для
получения управляющих напряжений для
цепи автопоиска и электронной
автоподстройки частоты первого
гетеродина, второй обеспечивает уточнение
настройки преселектора приемника путем
воздействия на двигатель, вращающий
конденсатор переменной емкости.
Синтезатор частот (рис. 62), построенный по методу косвенного синтеза, использующий кольцо ФАПЧ, состоит из управляемого по частоте перестраиваемого генератора Г, частота колебаний которого определяет частоту колебаний на выходе СЧ. Поскольку на выходе такого СЧ действует только одно высокостабильное колебание от генератора Г и далеко отстоящие от основной частоты гармоники, удается получить высокую спектральную чистоту выходного колебания. Стабильность выходного колебания обеспечивается тем, что частота генератора Г сравнивается с точностью до фазы с высокостабильной частотой вспомогательного генератора (ВГ).
Для сравнения
используется фазовый детектор ФД,
включаемый в цепь ФАПЧ генератора Г.
Частота генератора
![]() в общем случае не равна частоте генератора
в общем случае не равна частоте генератора![]() поэтому в рассматриваемом СЧ
предусматривается тракт анализа частоты
поэтому в рассматриваемом СЧ
предусматривается тракт анализа частоты![]() (ТАЧ), преобразующий частоту
(ТАЧ), преобразующий частоту![]() в частоту
в частоту![]() .
Такое преобразование можно сделать
двумя путями:
суммированием (вычитанием)
и делением частоты
.
Такое преобразование можно сделать
двумя путями:
суммированием (вычитанием)
и делением частоты![]() .
Умножение частоты, как правило, не
применяется, поскольку при этом уровень
побочных составляющих возрастает. В
соответствии с этим различают две
разновидности СЧ.
.
Умножение частоты, как правило, не
применяется, поскольку при этом уровень
побочных составляющих возрастает. В
соответствии с этим различают две
разновидности СЧ.
Рассмотрим
простейший случай, когда частота
![]() и тракта преобразования частоты
и тракта преобразования частоты![]() как такового
не требуется. Так, в СЧ
по схеме рис. 63 осуществляют прямой
синтез частот с фильтрацией с помощью
типового кольца ФАПЧ. Синтезатор работает
следующим образом. Напряжения от Г с
частотой
как такового
не требуется. Так, в СЧ
по схеме рис. 63 осуществляют прямой
синтез частот с фильтрацией с помощью
типового кольца ФАПЧ. Синтезатор работает
следующим образом. Напряжения от Г с
частотой![]() и от ГГ с одной из частот
и от ГГ с одной из частот![]() близкой или равной частоте
близкой или равной частоте![]() ,
подается на ФД. В качестве источника
напряжения с частотой
,
подается на ФД. В качестве источника
напряжения с частотой![]() используется ГГ (
используется ГГ (![]() равняется одной из гармоник ОГ).
равняется одной из гармоник ОГ).
При
![]() 1
на выходе ФД появляется управляющее
напряжение, которое после ФНЧ поступает
на управляющий элемент (УЭ). Элемент
вызывает изменение частоты генератора
Г. Режим устанавливается (генератор Г
входит в режим синхронизации), когда
выполняется условие Перестраивая
генератор Г, получаем на выходе СЧ
дискретную сетку частот
1
на выходе ФД появляется управляющее
напряжение, которое после ФНЧ поступает
на управляющий элемент (УЭ). Элемент
вызывает изменение частоты генератора
Г. Режим устанавливается (генератор Г
входит в режим синхронизации), когда
выполняется условие Перестраивая
генератор Г, получаем на выходе СЧ
дискретную сетку частот![]() сn
декадами. Недостаток такого СЧ – в
ограниченном числе колебаний на его
выходе.
сn
декадами. Недостаток такого СЧ – в
ограниченном числе колебаний на его
выходе.
Рассмотрим принцип
построения СЧ с вычитанием частоты в
тракте преобразования частоты
![]() .
Схема такого СЧ показана на рис.63.
.
Схема такого СЧ показана на рис.63.

Рис. 62
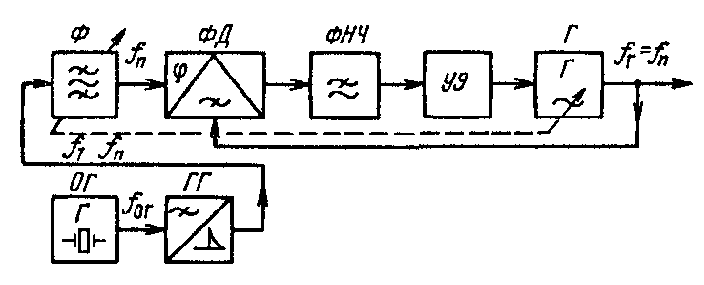
Рис. 63
По сравнению с СЧ,
построенным по схеме рис. 64, добавлены
преобразователь частоты Пр и вспомогательный
высокостабильный генератор ВГ. Частота
генератора Г в установившемся режиме
![]() ,
а частота колебания на выходе
преобразователя
,
а частота колебания на выходе
преобразователя![]() .
При изменении частоты генератора Г
частота на выходе Пр становится отличной
от
.
При изменении частоты генератора Г
частота на выходе Пр становится отличной
от![]() ,
появляется напряжение на выходе ФД,
которое через УЭ компенсирует расстройку
генератора Г. Если использоватьm
гармоник частоты генератора ВГ, то общее
число частот, получаемых в данном СЧ с
одним преобразователем в кольце ФАПЧ,
составит nm.
,
появляется напряжение на выходе ФД,
которое через УЭ компенсирует расстройку
генератора Г. Если использоватьm
гармоник частоты генератора ВГ, то общее
число частот, получаемых в данном СЧ с
одним преобразователем в кольце ФАПЧ,
составит nm.
Увеличить число
частот, получаемых на выходе СЧ, можно
путем применения двукратного вычитания
частоты. Схема такого СЧ показана на
рис. 64, он работает аналогично СЧ по
схеме рис. 65. В установившемся режиме
![]() число возможных выходных частот равноnml,
где l
– число используемых гармоник частоты
генератора ВГ2. Можно и дальше увеличивать
число вычитаний в кольце ФАПЧ, что
приведет к возрастанию общего числа
частот на выходе СЧ и уменьшению шага
перестройки. Однако получение шага
меньше 100 ... 200 Гц наталкивается на ряд
трудностей при реализации СЧ.
число возможных выходных частот равноnml,
где l
– число используемых гармоник частоты
генератора ВГ2. Можно и дальше увеличивать
число вычитаний в кольце ФАПЧ, что
приведет к возрастанию общего числа
частот на выходе СЧ и уменьшению шага
перестройки. Однако получение шага
меньше 100 ... 200 Гц наталкивается на ряд
трудностей при реализации СЧ.
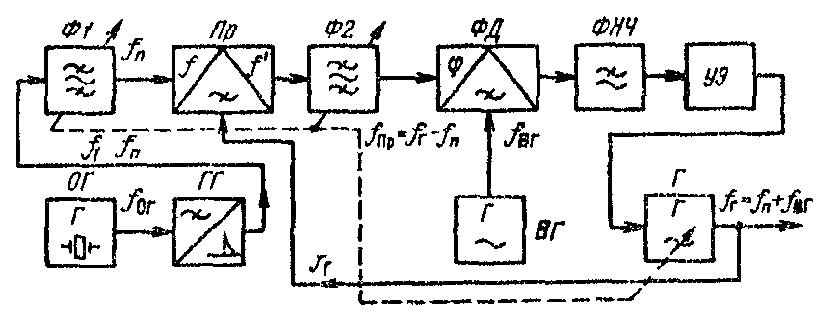
Рис. 64
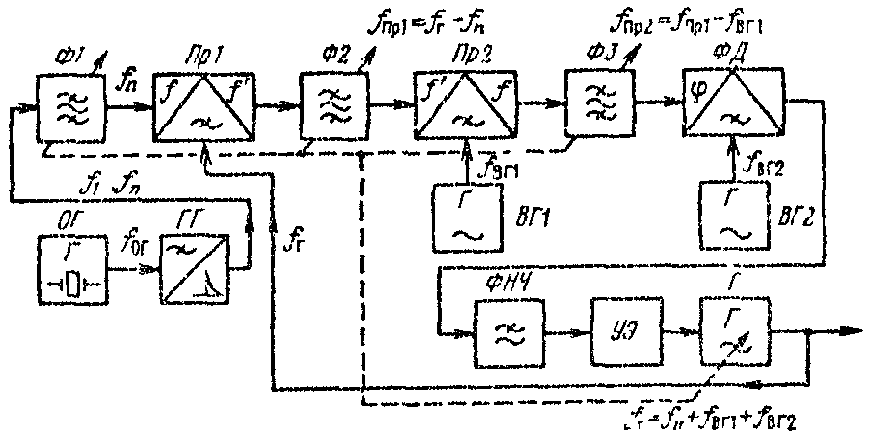
Рис. 65
Структурная схема
СЧ, построенного методом косвенного
синтеза с делением частоты в тракте
анализа частоты, показана на рис. 66. Эта
схема отличается от типовой схемы ФАПЧ
наличием делителя частоты с переменным
коэффициентом деления ДПКД, который
делит частоту генератора Г на n,
синхронизация в рассматриваемом СЧ
наступает при частоте ОГ
![]() .
Изменяя коэффициент деленияn
и одновременно перестраивая Г, можно
изменять частоту на выходе СЧ. Отметим,
что уменьшение уровня побочных
спектральных составляющих в СЧ,
построенных по методу косвенного
синтеза, достигается увеличением времени
установления частоты выходного колебания.
.
Изменяя коэффициент деленияn
и одновременно перестраивая Г, можно
изменять частоту на выходе СЧ. Отметим,
что уменьшение уровня побочных
спектральных составляющих в СЧ,
построенных по методу косвенного
синтеза, достигается увеличением времени
установления частоты выходного колебания.
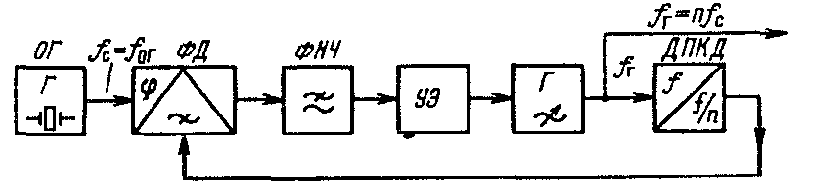
Рис. 66
Системы автоматической регулировки усиления
Автоматическая регулировка усиления (АРУ) предназначается для сохранения заданного постоянства выходного напряжения приемника в условиях изменения интенсивности принимаемых сигналов. Она устраняет перегрузки в каскадах приемника при приеме мощных сигналов и тем самым исключает возможность появления нелинейных искажений, обусловленных такими перегрузками. Наряду с этим применение системы АРУ обеспечивает нормальную работу выходных устройств радиоприемника при большом динамическом диапазоне мощности сигналов в антенне.
Принцип действия систем АРУ заключается в автоматическом изменении усилительных свойств или коэффициентов передачи отдельных элементов радиоприемного тракта при изменении интенсивности принимаемых сигналов. При этом увеличение уровня сигнала на входе сопровождается уменьшением коэффициента усиления и, наоборот, при уменьшении величины сигнала усиление приемника будет возрастать, стремясь к своему предельному значению.
Эффективность системы АРУ оценивается относительным изменением выходного напряжения приемника:
![]() , (112)
, (112)
которое имеет место при определенном изменении напряжения или мощности сигнала на входе
![]() (113)
(113)
Практически величина В лежит в пределах 1,1—10,0, а значение Д может достигать 104-105.
Рассмотрим классификацию систем АРУ, в основу которой положены различные признаки. Прежде всего системы АРУ различаются по принципу регулирования следующим образом. Если цепь АРУ и регулируемый усилитель представляют собой замкнутую систему регулирования с обратной связью (рис. 53, а), то регулирующее воздействие, формируемое цепью регулирования, зависит от уровня выходного напряжения. Такие АРУ с обратной связью иногда называют регулировкой «назад». Если же цепь регулирования действует независимо от величины напряжения на выходе регулируемого усилителя (рис. 53, б.) то регулирующее воздействие определяется только уровнем входного сигнала и обратная связь в системе отсутствует. Такие АРУ без обратной связи часто называют регулировкой «вперед». К системам АРУ с программным регулированием (рис. 53, в.) относят системы, у которых регулирующее воздействие создается специальной цепью, задающей определенный закон изменения усиления приемника во времени. Такое регулирование используется при заранее известном законе изменения интенсивности сигнала на входе приемника. Подобные системы иначе называют системами временной автоматической регулировки усиления (ВАРУ).
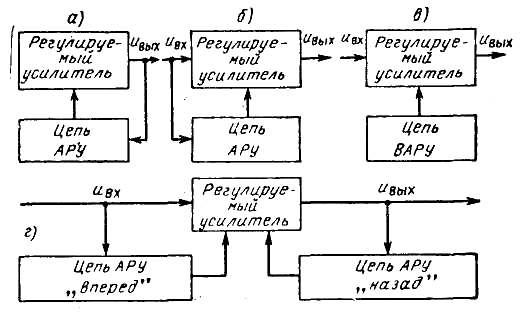
Рис. 53
Комбинированные системы АРУ представляют собой сочетание рассмотренных принципов регулирования. Так, на рис. 53 г. изображена система АРУ, содержащая цепи регулирования с обратной связью и без обратной связи. Системы АРУ без обратной связи («вперед»), а также комбинированные системы находят применение, главным образом, при исключительно высоких требованиях к постоянству выходного напряжения приемника.
Наибольшее распространение в современных радиоприемных устройствах получили системы АРУ с обратной связью.
По виду принимаемых приемником сигналов системы АРУ разделяются на два больших класса — непрерывные и импульсные. Основное различие таких систем заключается в особенностях формирования регулирующего напряжения, под действием которого происходит изменение усилительных свойств приемника.
В зависимости от
наличия порога срабатывания системы
АРУ делятся на простые и задержанные.
В простых схемах АРУ порог срабатывания
отсутствует, цепь регулирования
обеспечивает регулирующее воздействие
практически при любом уровне сигнала
на входе приемника. Использование такой
схемы приводит к уменьшению коэффициента
усиления приемника не только при больших
сигналах, но и при малых. Это является
существенным недостатком простой схемы
АРУ. Схема АРУ с задержкой лишена этого.
Цепь регулирования в такой схеме
оказывается разомкнутой до того момента,
пока напряжение сигнала на входе
приемника не достигнет некоторого
порогового значения, равного
![]() ,
соответствующего обычно чувствительности
приемника. Таким образом, регулирование
коэффициента усиления в случае применения
схемы АРУ с задержкой осуществляется
лишь при больших уровнях сигнала,
превышающих чувствительность приемника.
Схемы АРУ подавляющего большинства
современных радиоприемных устройств
являются задержанными. Для повышения
эффективности систем АРУ в цепи
регулирования усилением приемника
могут включаться дополнительные
усилительные каскады. Такие системы
получили название систем АРУ с усилением.
Как правило, усиленные АРУ одновременно
являются и задержанными. На рис. 54
изображены амплитудные характеристики
приемника при различных схемах АРУ,
наряду с которыми для сравнения приведена
характеристика приемника без АРУ [20].
,
соответствующего обычно чувствительности
приемника. Таким образом, регулирование
коэффициента усиления в случае применения
схемы АРУ с задержкой осуществляется
лишь при больших уровнях сигнала,
превышающих чувствительность приемника.
Схемы АРУ подавляющего большинства
современных радиоприемных устройств
являются задержанными. Для повышения
эффективности систем АРУ в цепи
регулирования усилением приемника
могут включаться дополнительные
усилительные каскады. Такие системы
получили название систем АРУ с усилением.
Как правило, усиленные АРУ одновременно
являются и задержанными. На рис. 54
изображены амплитудные характеристики
приемника при различных схемах АРУ,
наряду с которыми для сравнения приведена
характеристика приемника без АРУ [20].

Рис. 54
По своим инерционным свойствам системы АРУ разделяются на быстродействующие и инерционные. Практически все системы АРУ приемников непрерывных сигналов являются инерционными. Длительность переходного процесса в них может колебаться в широких пределах в зависимости от ожидаемой скорости изменения уровня входных сигналов, а также от вида и частоты модуляции.