

1. Статическая сторона задачи.
![]()
![]()
![]()
отсюда
![]() (а)
(а)
2. Геометрическая сторона задачи.
Под действием силы РбалкаАСопустится и наклонится, заняв положениеА1С1(рис.2.48,б).
Исходя из силовой схемы, определяем степень статической неопределимости: S=3-2=1. Следовательно, для определения трех неизвестных силN1,N2иN3требуется одно дополнительное уравнение. Оно составляется из условия совместности деформации стержней по схеме деформированной системы:
![]() (b)
(b)
или
![]()
3. Физическая сторона задачи.
По закону Гука имеем:
![]()
![]()
![]()
Подставляя это в (b), получаем:
![]() (с)
(с)
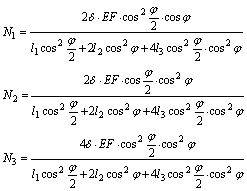
4. Определение неизвестных.
Решая совместно уравнения (с)и(а), находим:
![]()
![]()
![]()
5. Энергетическая проверка.
Работа Авнешней силыРна
перемещении![]() равна сумме потенциальной энергии
деформации стержней системы U:А=U
равна сумме потенциальной энергии
деформации стержней системы U:А=U
![]() (d)
(d)
где
Подставляя все в (d), получим
33.811,2=33.811,2;
т. е. равенство (d)удовлетворяется.
Пример 22.
Определить усилия в стержнях, возникающие
при сборке узла А из-за неточности![]() изготовления элементов системы
(устранение технологического зазора
изготовления элементов системы
(устранение технологического зазора![]() )
рис. 2.49, а.
)
рис. 2.49, а.
Дано: E1=E2=E;F1=2F2=2F;l1=l2=l;![]()

Рис. 2.49
Решение.
1. Статическая сторона задачи.
![]()
![]()
тогда
![]() и
и
![]() (а)
(а)
2. Геометрическая сторона задачи.
После принудительной сборки конструкции шарнир А займет положениеА1(рис. 2.49,б). Стержни 1 и 2 окажутся растянутыми. В соответствии с этим схема деформированной системы имеет вид, показанный на рис. 2.49, б.
Степень статической неопределимости S=3-2=1. Исходя из схемы деформированного состояния, составляем условие совместимости деформаций:
![]() (в)
(в)
Строго говоря, удлинение
![]() получится, если из точкиВописать
дугу радиуса
получится, если из точкиВописать
дугу радиуса![]() ,
однако, в силу малости деформаций,
,
однако, в силу малости деформаций,![]() можно получить, опуская перпендикуляр
из точкиА на новое направление
стержня
можно получить, опуская перпендикуляр
из точкиА на новое направление
стержня![]() .
.
В собранном состоянии угол между
стержнями
![]() будет меньше, чем
будет меньше, чем![]() .
Однако, в силу малости деформаций,
изменение угла
.
Однако, в силу малости деформаций,
изменение угла![]() отразится на 5 или 6 знаке косинуса, что
несущественно.
отразится на 5 или 6 знаке косинуса, что
несущественно.
3.Физическая сторона задачи.
Согласно закону Гука
![]()
![]()
Подставляя это в (в) получим:
![]() (с)
(с)
4. Определение неизвестных.
Решая систему уравнений (с) и (а), с учетом, что N1=R1, аN2=R2имеем:
![]()
![]()
где N1иN2так называемые монтажные усилия.
Пример 23.
Определить
усилия в стержнях системы, возникающие
в результате поворота двухсторонней
винтовой стяжки <<С>> на угол
![]() .
Жесткость стяжки равна жесткости
третьего стержня (рис. 2.50).
.
Жесткость стяжки равна жесткости
третьего стержня (рис. 2.50).
Дано: E1=E2=E3=E,F1=2F3=2F2=2F; шаг винтовой нарезки гайки-h;l1=l.

Рис.2.50
Решение.
1.Статическая сторона задачи.
Составляем уравнения равновесия узла А(рис. 2.50, в). Учитывая симметрию относительно осиY, имеем:
![]()
отсюда
![]() (а)
(а)
Составляем уравнения равновесия узла B (рис. 2.50, с).
![]()
отсюда
 (b)
(b)
Тогда степень статической неопределенности подсчитывается так: S=3-2=1
2. Геометрическая сторона задачи.
При
повороте гайки на угол
![]() стержень 3, состоящий из двух частей,
ввинтится в гайку на величину
стержень 3, состоящий из двух частей,
ввинтится в гайку на величину
![]()

Рис. 2.51
За счет ввинчивания стержня 3 точки А и
В сблизятся на величину
![]() ,
а за счет растяжения этого стержня и
стяжки они разойдутся на величину
,
а за счет растяжения этого стержня и
стяжки они разойдутся на величину![]() (рис. 2.51). Тогда, на основании схемы
деформированной системы, условие
совместности деформаций будет иметь
вид:
(рис. 2.51). Тогда, на основании схемы
деформированной системы, условие
совместности деформаций будет иметь
вид:
![]() (с)
(с)
3. Физическая сторона задачи.
Согласно закону Гука.
![]() ;
;![]() ;
;![]() (d)
(d)
Здесь l1=l2по условию, аl2иl3можно определить из равенства проекций стержней на горизонтальную и вертикальную оси (рис. 2.50, а):
![]()
![]()
Подставляя (d) в (с), получим:
 (е)
(е)
4. Определение неизвестных.
Решая систему, составленную из уравнений (а), (в) и (е),получим:
Пример 24.
Определить
усилия в стержнях системы, возникающие
в результате повышения температуры
всех стержней на
![]() (рис. 2.52, а)
(рис. 2.52, а)
Дано:
F1=F2=F;
E1=0,5E;E2=E;![]() ;
;![]() ;l1=l
;l1=l

Рис.2.52