tmm
.pdf
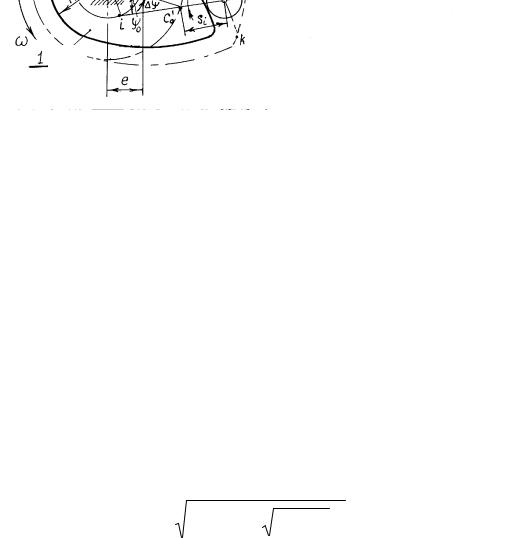
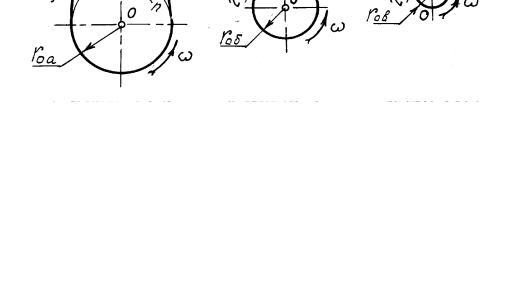
Рис. 6.4. Кулачковый механизм с коромысловым толкателем
При заданных l, l0 и θ0 радиус может быть определен геометрически, как сторона треугольника АОС0. При заданных l, l0 и r0 угол θ определяется по формуле
|
|
|
|
|
|
l 2 |
+ l 2 |
− r 2 |
|
|
|
|
|
(6.35) |
|||||
|
|
|
cosθ = |
|
|
|
0 |
|
0 |
. |
|
|
|
|
|
||||
|
|
|
|
|
2l l0 |
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Координаты любой точки профиля Сi′ определяются по формулам: |
|||||||||||||||||||
радиус-вектор |
r |
= |
l 2 + l 2 |
− 2l l |
0 |
cos(θ |
0 |
+θ |
i |
), |
(6.36) |
||||||||
|
i |
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
||||
полярный угол |
|
δi |
= ϕi |
|
ψ = ϕi (ψ0 −ψi |
). |
|
(6.37) |
|||||||||||
|
|
|
|
|
|
|
|
|
|
r |
2 |
+ l 2 |
−l 2 |
|
|
|
|
||
Здесь |
|
cosψ0 |
= const |
= |
0 |
0 |
|
|
, |
|
(6.38) |
||||||||
|
|
2r0l0 |
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
r 2 + l 2 |
−l 2 |
|
|
|
|
|
|
|||||
|
|
|
cosψi |
= |
i |
|
|
|
0 |
|
|
. |
|
|
|
|
(6.39) |
||
|
|
|
|
2ril0 |
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
В формуле (6.37) знак «–» принимается, когда на фазе удаления |
|||||||||||||||||||
(подъема) направления вращения |
кулачка |
|
и |
коромысла |
совпадают, |
||||||||||||||
и знак «+» если они противоположны. |
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
165 |
|
|
|
|
|
|
|
|
|||