

tmm
.pdfСоединив точки h и b, получим полный вектор FR1,2. Из плана сил получим
FR1,2 = |
|
|
|
|
и FR0,3 |
= |
|
|
|
|
FR1,2 μF = hb μF |
FR0,3 μF = gh μF . |
|||||||||
Для определения реакции FR2,3 |
или FR3,2 |
во внутренней кинемати- |
||||||||
ческой паре В2,3 (шарнир D) составим уравнение равновесия звена 2. Со стороны звена 3 на звено 2 будет действовать сила FR3,2, тогда
|
|
∑ |
|
|
= |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= 0. |
(3.10) |
|
F |
FR1,2 + Fi2 + FG2 + FR4,2 + FR3,2 |
|||||||||||||||||||||||||
На плане сил это будет отрезок eh (см. рис. 3.9): |
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
FR3,2 = |
|
μF =…H. |
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
eh |
|
|
|||||||||||||||
(Получим тот же результат, если рассмотреть звено 3: |
|
|||||||||||||||||||||||||
∑ |
|
= |
|
|
|
|
|
|
|
|
= −FR3,2 .) |
|
||||||||||||||
F |
FG3 + Fi3 + FR0,3 + FR3,2 = 0 ; FR2,3 |
|
||||||||||||||||||||||||
Таким образом, из плана сил найдены реакции во всех кинематиче-
ских парах группы 2–3: FR1,2, FR2,3, FR3,0.
Найдем точку приложения реакции FR0,3 в поступательной кинематической паре П0,3, для чего составим уравнение равновесия звена 3 (ползуна) в форме моментов.
В данном случае силы Fi3, F проходят через центр шарнира D, тогда для звена 3 момент сил относительно точки D
M D = FR0,3 h5 − FG3 h4 = 0, |
(3.11) |
||
отсюда |
|
|
|
h = |
FG3 h4 |
= ... мм. |
(3.12) |
|
|||
5 |
R0,3 |
|
|
|
|
|
|
Если h4= 0, то и h5 = 0, т. е. векторы всех сил и давлений в кинематической паре будут проходить через одну и ту же точку – центр шарнира D.
При необходимости учесть силы трения расчет ведется, как правило, методом последовательных приближений, за начальное приближение берется расчет без учета сил трения.
3.2.4. Силовой расчет начального механизма 1 – 0
Начальным механизмом является кривошип 1, образующий со стойкой вращательную кинематическую пару B0,1.
Как известно, силовой расчет в этом случае сводится к определению реакции в кинематической паре FR0,1 и величины уравновешивающей силы Fb либо уравновешивающего момента Мb, что определяется схемой привода.
91
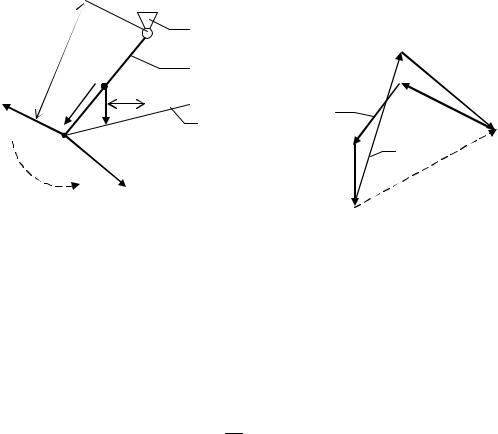
Определим уравновешивающую силу Fb, приложенную по касательной к точке В. Схема действия сил показана на рис. 3.10, а.
К кривошипу 1 приложены силы:
FR2,1= … H, реакция в шарнире В – давление со стороны звена 2, полученное из расчета предыдущей группы;
FG2= … H, вес звена 1;
Fi1= … H – сила инерции звена 1.
Пусть уравновешивающая сила Fb приложена в точке В и линия действия её перпендикулярна кривошипу.
Уравновешивающую силу найдем из уравнения моментов
|
M A = Fb AB + FG1 h1 − FR2,1 h2 = 0, |
(3.13) |
|||||||||
отсюда |
|
|
|
|
|
|
|
|
|
|
|
|
F |
= |
− FG1 h1 + FR2,1 h2 |
= ... H. |
|
|
|
(3.14) |
|||
|
|
|
|
|
|||||||
|
b |
|
|
|
|
AB |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Здесь плечи сил h1, h2 определяются из чертежа. |
μF =... H/мм |
|
|||||||||
|
A |
0 |
|
|
|
||||||
|
|
|
|
|
|
|
|
||||
h2 |
|
|
|
1 |
|
|
a |
|
|||
|
|
|
|
|
|
||||||
|
S1 |
|
|
|
|
|
Fb |
|
|||
FR2,1 |
|
|
|
|
|
|
|
|
|||
h1 |
|
|
|
|
|
|
|
|
|
|
|
Fi1 |
|
|
2 |
Fi1 |
|
c |
|
||||
|
|
|
|
|
FR2,1 |
b |
|||||
|
|
|
|||||||||
B |
FG1 |
|
|
|
|
|
d |
|
|
|
|
|
|
|
|
|
|
FR0,1 |
F*R0,1 |
|
|||
|
|
|
|
|
FG1 |
|
|
||||
Mb |
Fb |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|||||
|
|
|
|
f |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
||
|
а) |
|
|
|
|
|
|
|
б) |
|
|
Рис. 3.10. Начальный механизм: а – схема; б – план сил
Реакцию FR0,1 в кинематической паре B0,1 (в шарнире А) определим из условия равновесия звена 1:
∑ |
|
= |
|
|
|
|
|
|
|
|
|
|
(3.15) |
F |
Fb + FR2,1 + Fi1 + FG1 + FR0,1 = 0. |
||||||||||||
Строим план сил (см. рис. 3.10, б, начало построения – точка а), отсюда найдем FR0,1:
FR0,1 = fa μF = ... H.
Если к начальному механизму будет приложен уравновешивающий момент Mb (показан на рис. 3.10, а пунктиром, его направление можем
92

задать произвольно, с учетом предполагаемого направления составим уравнения равновесия), то его величина и направление также определятся из уравнения равновесия кривошипа:
M A = M b + FG1 h1 − FR2,1 h2 = 0, |
(3.16) |
отсюда |
|
M b = FR2,1 h2 − FG1 h1 = ... Н. |
(3.17) |
Здесь h1, h2 – действительные значения плеч действующих сил для механизма!
Если после подстановки в уравнение (3.17) момент Мb получится отрицательным, следовательно, направление его будет противоположным первоначальнопредположенному.
Реакция в кинематической паре F* в этом случае определится из уравнения
∑ |
|
= |
|
|
+ |
|
|
|
|
+ |
|
|
+ |
|
* |
= 0. |
(3.18) |
|
F |
F |
F |
F |
|
F |
|||||||||||||
|
|
|
R2,1 |
|
|
i2 |
|
|
G1 |
|
R0,1 |
|
|
|||||
Из плана сил найдем |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
F * |
= |
|
μ |
|
|
= |
|
H. |
|
|
||||||
|
|
fb |
F |
|
|
|
||||||||||||
|
|
|
R0,1 |
|
|
|
|
|
|
|
|
|
|
|
|
|||
Как видно, величина реакции в шарнире А может существенно отличаться, а от этого будут зависеть размеры цапф (подшипников). Если вал кривошипа получает вращение через соединительную муфту, то к нему будет приложен момент и при силовом расчете следует определять величину уравновешивающего момента Mb. Если вал кривошипа получает вращение через зубчатое зацепление, тов этом случае на кривошип будет действовать уравновешивающая сила Fb, приложенная в полюсе зацепления, и будет направлена по линии зацепления. При передаче вращения посредством цепной или ременной передачи уравновешивающая сила будет направлена поветвицепиилиремня.
Из сравнения уравнений (3.13) и (3.16) следует, что
Mb = Fb lAB ,
т. е. определив Fb, при необходимости можно найти Mb, и наоборот:
Fb = Mb .
lAB
93
3.2.5. Определение величины уравновешивающей силы методом рычага Н.Е. Жуковского
Этот метод позволяет определить величину уравновешивающей силы без определения реакций в кинематических парах, т. е. без выполнения силового расчета групп Ассура.
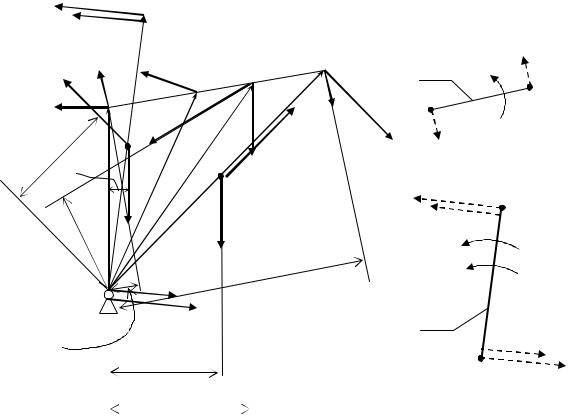
Рычаг Жуковского представляет повернутый на 90º план скоростей, принимаемый как твердое тело, с неподвижной точкой в полюсе, к концам векторов одноименных точек которого приложены внешние силы, в том числе уравновешивающая сила. Из условия равновесия этого рычага и определяется величина уравновешивающей силы.
На рис. 3.11 показан повернутый на 90° план скоростей с приложенными к концам соответствующих векторов внешними силами.
|
F'5 |
k |
|
|
К замене моментов сил |
|||||
|
|
|
|
|
||||||
|
|
|
|
|
|
инерции силами |
||||
|
F'i5 |
|
|
|
|
|||||
|
c5 |
|
|
b |
|
|
|
F''i2 |
||
|
'' |
s2 |
|
|
M |
|||||
|
|
|||||||||
|
F i2 |
c2,4 |
|
2 |
|
i2 |
||||
|
Fi5 |
|
|
|
|
|
||||
Fi3 |
|
d |
|
|
|
|
B |
|
D |
|
|
|
Fi2 |
|
|
F'i2 |
|
|
|||
|
|
|
|
|
Fi1 |
|
|
|||
|
h6 |
s5 |
|
|
F'i2 |
б) |
||||
|
s1 |
|
|
Fb |
||||||
|
|
|
||||||||
|
h5 |
|
|
|
|
|
|
|
||
|
FG5 |
|
FG2 |
|
|
|
F'5 |
|
||
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
K |
||
|
h4 |
|
|
|
|
F'i5 |
|
|||
|
FG1 |
|
|
|
|
|
||||
|
|
|
|
h2 |
M5 |
|
||||
|
|
|
|
|
|
|||||
|
|
|
|
|
Mi5 |
|
||||
|
|
|
'' |
|
|
|
|
|
|
|
|
Pv,f |
F i5 |
|
|
|
|
|
|
|
|
|
|
|
|
5 |
|
|
|
|||
|
h7 |
|
F''5 |
|
|
|
|
F''i5 |
||
|
|
h1 |
|
|
|
|
|
E |
||
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
F''5 |
|
|
|
|
h3 |
|
|
а) |
в) |
|||
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
Рис. 3.11. Рычаг Жуковского
Момент сопротивления M5, а также моменты сил инерции Mi5
и Mi2 звеньев 5 и 2 |
на рычаге Жуковского |
заменены парами сил |
F5′ = −F5′′, Fi′5 = −Fi′5′, |
приложенными в точках |
K и E, перпендикуляр- |
ными звену 5, и силами Fi′2 = −Fi′2′, приложенными в точках В и D пер-
94
пендикулярно звену 2 (рис. 3.11, б, в). Значения этих сил определятся из выражений:
F5′ = F5′′= |
M 5 |
, |
|
(3.19) |
||||
|
|
|||||||
|
|
|
lKF |
|
||||
Fi′5 |
= Fi′5′ |
= |
|
M i5 |
, |
(3.20) |
||
|
|
|||||||
|
|
|
|
lKF |
|
|||
Fi′2 |
= Fi′2′ |
= |
|
M i2 |
. |
(3.21) |
||
|
|
|||||||
|
|
|
|
lBD |
|
|||
Принимая повернутый на 90° план скоростей как твердое тело (рычаг), напишем уравнение равновесия
M P = Fb pvb − FG1 h1 − Fi′2 h2 − FG2 h3 + Fi2 h4 − FG5 h5 + |
(3.22) |
|
v |
||
+ Fi5 h6 + (F5′ + Fi′5 ) kf + Fi2 h7 + Fi3 df = 0. |
||
|
Из этого уравнения и определится уравновешивающая сила Fb. (Заметим, что в этом уравнении «плечи» сил Pvb, kf, df, h1, h2, … могут определятся непосредственно по чертежу.)
Расхождения в значениях величины уравновешивающей силы, полученных из плана сил и рычага Жуковского, определяемые по формуле
|
|
F пл − F ж |
|
|
|
F |
= |
b |
b |
100 % , |
(3.23) |
|
F пл |
||||
b |
|
|
|
|
|
|
|
|
b |
|
|
обычно не превышают 5…7 %.
Результаты определения реакций в кинематических парах и уравновешивающей силы удобно свести в таблицу.
3.3. Определение величины КПД механизма
Коэффициент полезного действия является показателем степени совершенства механизма.
Мгновенное значение КПД механизма, как уже было приведено ранее, определится по формуле
η = |
|
Pпc |
|
, |
(3.24) |
P |
+ ∑P |
|
|||
|
пc |
|
f |
|
|
где Pпc = M 5 ω5 =… Вт – мощность, |
затрачиваемая на преодоление |
||||
производственного (полезного) сопротивления (М5 – момент полезного сопротивления, Нм; ω5 – угловая скорость, 1/с); ∑Pf – суммарная
мощность, затрачиваемая на преодоление трения во всех кинематических парах («вредные» сопротивления).
95
Найдем моменты трения во вращательных и силы трения в поступательных кинематических парах.
Пусть радиусы цапф вращательных кинематических пар: rA, rB, rC, rD, rF (должны быть известны) и f – коэффициент трения в кинематических парах (в общем случае он может быть для каждой кинематической пары разным), тогда
M f 0,1 = FR0,1 fA rA =... Нм, |
|
|||||
M f 1,2 = FR1,2 fB rB =... Нм, |
|
|||||
|
||||||
M |
f 2,3 |
= F |
f |
D |
r =... Нм, |
|
|
R2,3 |
|
D |
|
||
M f 2,4 = FR2,4 fC rC =... Нм, |
|
|||||
|
||||||
M |
f 5,0 |
= F |
f |
F |
r =... Нм, |
|
|
R5,0 |
|
F |
|
||
Ff 3,0 = FR3,0 f3,0 =... Н, |
|
|||||
|
||||||
Ff 4,5 = FR4,5 f4,5 =... Н, |
|
|||||
|
||||||
мощности трения в кинематических парах будут:
Pf 0,1 = M f 0,1 ω1 =... Вт,
Pf 1,2 = M f 1,2 ω1/ 2 = M f 1,2 (ω1 −ω2 )=... Вт, Pf 2,3 = M f 2,3 ω2 =... Вт,
Pf 2,4 = M f 2,4 ω2 / 4 = M f 2,4 (ω2 −ω4 )=... Вт, Pf 5,0 = M f 5,0 ω5 =...Вт,
Pf 3,0 = Ff 3,0 VD =... Вт,
Pf 4,5 = Ff 4,5 VC4 / C5 =... Вт.
Суммарная мощность трения
(3.25)
(3.26)
∑Pf = Pf 0,1 + Pf 1,2 + Pf 2,3 + Pf 2,4 + Pf 5,0 + Pf 3,0 + Pf 4,5 . (3.27)
Подставив значения Pпс и ∑Pf в уравнение (3.24), получим значе-
ние КПД для данного положения механизма (мгновенное).
Следует отметить, что относительная угловая скорость, например ω1/2, ω2/4, есть алгебраическая разность угловых скоростей, поэтому в формулу подставляются угловые скорости с учетом знака, т. е. с учетом направления вращения. Суммировать же мощности трения следует как скалярные величины, т. е. без учета знака.
На этом заканчивается силовой расчет механизма.
96
3.4.Примеры силового расчета
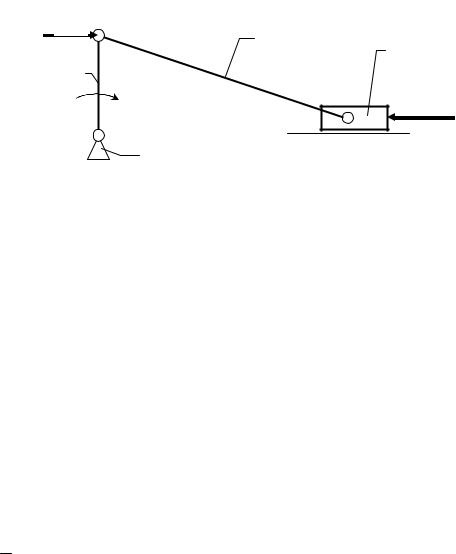
3.4.1.Кривошипно-шатунный механизм
Требуется определить реакции во всех кинематических парах и величину уравновешивающей силы кривошипно-шатунного механизма (рис. 3.12). F3 – сила полезного сопротивления, приложенная к звену 3.
Fb |
B |
2 |
|
3 |
|
|
|
|
|
|
1 |
|
|
|
|
ω1 |
|
C |
F3 |
|
|
|
||
|
A |
0 |
|
|
Рис. 3.12. Схема механизма
Пусть вес звеньев и силы инерции пренебрежимо малы по сравнению с внешней силой F3.
При решении этих примеров соблюдаем порядок, указанный ранее. Данный механизм состоит из начального механизма (кривошипа 1 и стойки 0) и группы Ассура (2–3) 2-го класса второго вида с двумя вращательными и одной внешней поступательной кинематической парой.
1.Вычерчиваем группу 2–3 в масштабе (рис. 3.13,а).
2.Расставляем неизвестные реакции во внешних кинематических парах: FR1,2 – известна точка приложения – центр шарнира В; FR0,3 – из-
вестна по направлению – перпендикулярна к направляющей α–α. 3. Составляем уравнение равновесия группы в форме сил:
∑ |
|
= |
|
|
|
|
|
|
(3.28) |
F |
FR1,2 + F3 + FR0,3 = 0 . |
||||||||
Разложим реакции в шарнире В на составляющие:
|
|
|
= |
|
n |
+ |
|
τ . |
(3.29) |
F |
F |
F |
|||||||
|
R1,2 |
|
R1,2 |
|
R1,2 |
|
|||
FFτ1,2 найдем из уравнения равновесия звена 2:
M |
C |
= Fτ |
l |
BC |
= 0. |
(3.30) |
|
R1,2 |
|
|
|
Следовательно, FFτ1,2 = 0 и FR1,2 = FRn1,2 .
В соответствии с уравнением (3.28) строим план сил группы
(рис. 3.13, б).
97
FτR1,2 |
FR1,2 |
|
|
|
|
|
План сил группы 2–3 |
|||||||
|
|
|
|
|
|
|||||||||
B |
|
|
|
|
|
|
|
|
|
|
|
|
μF= ... H/мм |
|
|
|
|
|
|
|
FR0,3 |
|
|
|
|
|
|
||
|
|
2 |
|
|
3 |
|
|
|
FR3,2 |
|||||
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
c |
|||
1 |
FnR1,2 |
|
|
|
|
|
|
|
|
|
|
|
FRn1,2=FR1,2 |
|
|
|
|
|
|
C |
|
F3 |
|
FR0,3 |
|||||
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
α |
|
|
|
|
|
α |
|
b |
FR2,3 |
|||
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
а |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
K |
|
h2 |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
F3 |
|||
|
а) |
|
|
|
|
|
|
|
|
|
б) |
|||
|
|
|
|
|
|
|
|
|
|
|||||
Рис. 3.13. Группа Ассура 2–3: а – схема; б – план сил
Из точки а (начало плана) откладываем вектор F3, из конца этого вектора проводим направление вектора FR0,3 , а из точки а плана прово-
дим направление вектора FRn1,2 ||ВС. Эти направления пересекаются в
точке С (многоугольник сил должен быть замкнутым). Из плана находим
FR0,3 = |
bc |
μF = ... H , |
(3.31) |
||||||
F |
= F n |
= |
|
μ |
|
= ... H . |
(3.32) |
||
ac |
F |
||||||||
R1,2 |
R1,2 |
|
|
|
|
|
|
||
Для определения реакции во внутренней кинематической паре (шарнир С) достаточно рассмотреть условие равновесия одного из звеньев.
Рассмотрим звено 2, тогда
∑ |
|
|
= |
|
|
|
|
|
|
|
|
|
(3.33) |
||
F |
FR1,2 + FR3,2 = 0 , |
||||||||||||||
отсюда |
|
||||||||||||||
|
|
|
|
FR3,2 = −FR1,2 . |
(3.34) |
||||||||||
Если рассмотреть звено 3, тогда |
|
||||||||||||||
∑ |
|
= |
|
|
|
|
|
|
(3.35) |
||||||
F |
F3 + F0,3 + FR2,3 = 0 . |
||||||||||||||
Из плана найдем |
|
||||||||||||||
FR2,3 = FR1,2 = −FR3,2 . |
(3.36) |
||||||||||||||
Точку приложения к реакции FR0,3 найдем из уравнений равновесия звена 3. Здесь линии действия реакции FR2,3 и силы F3 проходят через точку С, тогда
M C = FR0,3 h 2= 0 . |
(3.37) |
98
Так как FR0,3 ≠ 0, следовательно, h2=0, т. е. в данном случае реакция FR0,3 также будет проходить через центр шарнира С.
Расчет начального механизма 1–0
К кривошипу 1 (рис. 3.14,а) приложены в точке В нагрузка FR2,1 (FR2,1 =−FR1,2) со стороны звена 2 и уравновешивающая сила Fb, перпендикулярная кривошипу, которую найдем из уравнения равновесия:
|
M A = FR2,1 h1− Fb lAB = 0, |
(3.38) |
|||||||
отсюда |
|
|
|
|
|
|
|
|
|
|
|
F |
= |
FR2,1 h1 |
. |
|
(3.39) |
||
|
|
|
|||||||
|
|
|
|
b |
lAB |
|
|
||
|
|
|
|
|
|
|
|
||
FR2,1 |
Fb |
|
|
|
|
μF=… H/мм |
|||
B |
|
|
|
|
c |
||||
|
|
|
|
|
|
|
Fb |
||
|
|
|
|
|
|
b |
|||
|
|
|
|
|
|
|
|||
1 |
|
|
2 |
|
|
|
|||
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
FR0,1 |
FR0,1 |
h1 |
|
|
|
FR2,1 |
||||
|
|
|
|
|
|
|
|
||
A |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
|
|
0 |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
||
а) |
|
|
|
|
|
|
|
б) |
|
|
|
|
|
|
|
|
|
||
Рис. 3.14. Начальный механизм: а – схема; б – план сил
Реакцию в шарнире А найдем из плана сил, для чего составим уравнение равновесия звена 1 в форме сил:
∑ |
|
= |
|
|
|
|
|
|
(3.40) |
F |
FF 2,1 + Fb + FR0,1 = 0. |
||||||||
План сил построен на рис. 3.14,б.
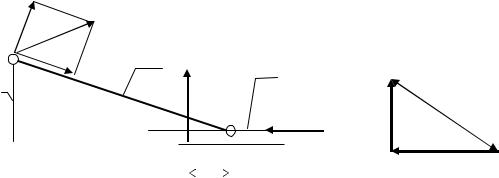
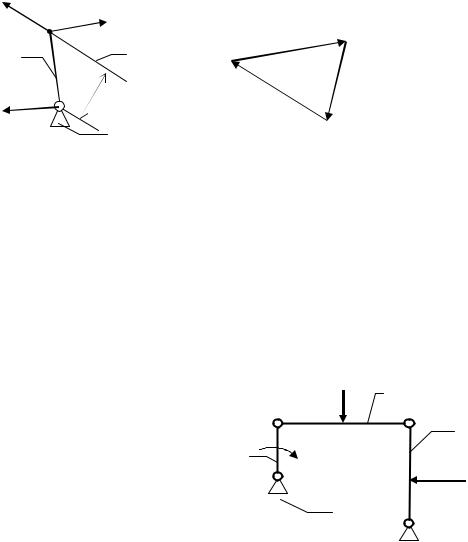
3.4.2. Шарнирный четырехзвенный механизм
Пусть F2=F3 – внешние силы, при- |
|
|
2 |
|
ложенные к звеньям 2 и 3 в точках K и Е |
|
F2 |
||
посередине звеньев (рис. 3.15). |
|
|
|
C |
Решение. Выделим группу Ассура |
B |
K |
3 |
|
2–3. [B1,2 – B2,3 – B3,0] – группа 2-го клас- |
1 |
Mb |
|
F3 |
са первого вида (рис. 3.16, а) с прило- |
A |
|
||
|
|
E |
||
женными к звеньям 2 и 3 силами F2 и F3. |
|
|
|
|
|
|
0 |
|
|
Во внешних кинематических парах |
|
|
|
D |
|
|
|
||
– шарнирах В и С приложим неизвест- |
Рис. 3.15. Схема механизма |
|||
ные реакции FR2,1 и FR0,3. Уравнение |
||||
99
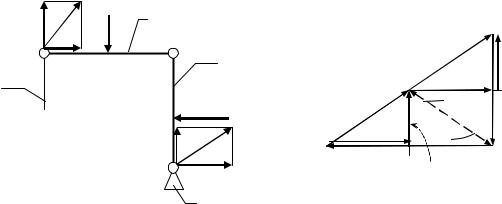
равновесия группы 2–3 примет вид
∑F =FR1,2 +F2 +F3 +FR0,3 =0. |
(3.41) |
τ |
FR1,2 |
2 |
|
|
μF = … H/мм |
|
||
|
|
|
|
|
||||
F R1,2 |
|
F2 |
|
|
|
|
|
b |
|
|
|
C |
|
|
FR1,2 |
||
|
|
|
|
|
|
τ |
||
B |
|
|
|
3 |
|
|
|
|
FnR1,2 |
K |
|
|
f |
|
F R1,2 |
||
|
|
|
FnR1,2 |
|||||
1 |
|
|
|
|
|
a |
||
|
|
|
|
F3 |
|
FR0,3 |
FR3,2 |
|
|
|
|
E |
|
F2 |
|||
|
|
|
FR0,3 |
|
FτR0,3 |
FR3,2 |
||
|
|
n |
R0,3 |
d |
|
|||
|
|
F |
|
|
|
|
||
|
F3 |
e |
n |
c |
|
F R0,3 |
|
||
D |
0 FτR0,3 |
|
|
|
а) |
|
б) |
|
|
Рис. 3.16. Группа 2–3: а – план группы; б – план сил группы
Так как реакции FR2,1 и FR0,3 неизвестны ни по величине, ни по направлению, разложим их на составляющие, направив их по звену ( FRn1,2
и F n |
) и перпендикулярно звену ( Fτ |
|
|
|
|
|
и F |
τ |
|
|
), т. е. |
|
|
|||||||||||||||||||||||||||||||||
R0,3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R1,2 |
|
|
|
|
|
|
|
|
R0,3 |
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= |
|
|
|
|
n |
|
+ |
|
|
τ |
|
|
|
, |
|
|
|
|
|
|
(3.42) |
||||||||
|
|
|
|
|
|
|
|
|
F |
|
F |
|
F |
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
R1,2 |
|
|
|
|
|
R1,2 |
|
|
|
|
|
R1,2 |
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= |
|
|
n |
|
+ |
|
|
τ |
|
|
|
|
. |
|
|
|
|
|
|
(3.43) |
|||||||||
|
|
|
|
|
|
|
|
|
F |
|
|
|
|
F |
|
F |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
R0,3 |
|
|
|
|
|
R0,3 |
|
|
|
|
|
R0,3 |
|
|
|
|
|
|
|
|
||||||||||||||
Тангенциальные составляющие найдем из условия равновесия |
||||||||||||||||||||||||||||||||||||||||||||||
звеньев 2 и 3. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Для звена 2 |
|
|
|
|
|
|
|
|
|
|
τ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
M |
C |
|
= −F |
|
l |
BC |
+ F |
|
l |
KC |
|
= 0 , |
|
|
(3.44) |
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
R1,2 |
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
отсюда |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
Fτ |
|
|
|
= F |
|
|
lKC |
|
= 0,5F . |
|
|
|
|
|
|
(3.45) |
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
Для звена 3 |
|
|
|
|
|
R1,2 |
|
|
2 lBC |
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
= Fτ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
M |
C |
|
l |
DC |
− F l |
FC |
= 0, |
|
|
(3.46) |
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
R0,3 |
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|||||||||||||
отсюда |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
Fτ |
|
|
|
= F |
|
|
lEC |
|
|
= 0,5F . |
|
|
|
|
|
(3.47) |
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
F |
0,3 |
|
|
|
|
|
3 lDC |
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
||||||||
Подставив (3.42) и (3.43) в уравнение (3.41), получим |
|
|||||||||||||||||||||||||||||||||||||||||||||
|
∑ |
|
= |
|
n |
|
|
+ |
|
τ |
|
+ |
|
+ |
|
+ |
|
τ |
|
|
+ |
|
n |
= 0 . |
(3.48) |
|||||||||||||||||||||
|
F |
F |
|
|
F |
|
F |
F |
F |
|
|
F |
||||||||||||||||||||||||||||||||||
|
|
|
|
R1,2 |
|
|
|
|
|
R1,2 |
|
|
|
|
|
2 |
|
3 |
|
|
|
|
|
|
R0,3 |
|
|
R0,3 |
|
|
||||||||||||||||
100