

4 лаба по тау 2 семестр (ещё одна)
.doc
М инистерство
науки и образования Российской Федерации
инистерство
науки и образования Российской Федерации
Федеральное государственное бюджетное учреждение высшего
профессионального образования
«НАЦИОНАЛЬНЫЙ ИССЛЕДОВАТЕЛЬСКИЙ ТОМСКИЙ ПОЛИТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ»
Институт – Энергетический институт
Направление – 140100 Теплоэнергетика и теплотехника
Кафедра – Автоматизации теплоэнергетических процессов
Исследование свойств нелинейной АСР
Отчет по лабораторной работе №6
по дисциплине «Теория автоматического управления»
Вариант №1
Выполнил: студент
группы 5Б03 С.С. Питер
Проверил: старший преподаватель
кафедры АТП Е.В. Иванова
Томск – 2013
Цель работы: исследовать свойства нелинейных систем управления, получить навык расчетного определения параметров нелинейного регулятора (элемента), получить навык практического исследования нелинейных систем на ЭВМ.
Используемая в работе программа: AFX, NEL.
Постановка задачи:
Д
S Y Z
Н.Э. Wоб












Рисунок 1 – Структурная схема нелинейной системы управления
с заданным видом нелинейности и передаточной функцией
![]()
расчетным методом определить параметры нелинейного элемента, обеспечивающего автоколебания с заданными параметрами на выходе АСР.
Исходные данные:
Передаточная
функция объекта:
![]()
Параметры автоколебаний А=0,3 ; ω=0,08.
Порядок работы:
Условие
устойчивости автоколебаний: если от
точки пересечения ветвь характеристики
![]() при
при
![]() не
охватывается АФЧХ линейной части, то
автоколебания будут устойчивыми. Для
определения параметров автоколебаний
используется уравнение Гольдфарба:
не
охватывается АФЧХ линейной части, то
автоколебания будут устойчивыми. Для
определения параметров автоколебаний
используется уравнение Гольдфарба:
![]() .
Из которого видно, что параметры
автоколебаний определяются в точке
пересечения графиков АФЧХ объекта, и
инверсной комплексной характеристики
нелинейного элемента
.
Из которого видно, что параметры
автоколебаний определяются в точке
пересечения графиков АФЧХ объекта, и
инверсной комплексной характеристики
нелинейного элемента
![]() .
.
1
Для нелинейных элементов типа
трехпозиционного реле, двухпозиционное
реле, зоны нечувствительности, инверсная
комплексная характеристика совпадает
с действительной отрицательной полуосью,
причем при
![]() инверсная
комплексная характеристика нелинейного
элемента
инверсная
комплексная характеристика нелинейного
элемента
![]() ,
то есть параметры автоколебаний будут
определяться в точке пересечения АФЧХ
объекта и отрицательной вещественной
полуоси. С помощью программы AFX строим
АФЧХ объекта, график представлен на
рисунке 2.
,
то есть параметры автоколебаний будут
определяться в точке пересечения АФЧХ
объекта и отрицательной вещественной
полуоси. С помощью программы AFX строим
АФЧХ объекта, график представлен на
рисунке 2.
Таблица 1 – АФЧХ объекта
|
w |
Re |
Im |
w |
Re |
Im |
|
0,00 |
5,5 |
0 |
0,25 |
-0,313 |
0,249 |
|
0,01 |
5,046 |
-1,825 |
0,26 |
-0,275 |
0,252 |
|
0,02 |
3,900 |
-3,140 |
0,27 |
-0,239 |
0,252 |
|
0,03 |
2,509 |
-3,756 |
0,28 |
-0,207 |
0,251 |
|
0,04 |
1,238 |
-3,791 |
0,29 |
-0,178 |
0,247 |
|
0,05 |
0,249 |
-3,470 |
0,3 |
-0,151 |
0,243 |
|
0,06 |
-0,438 |
-2,987 |
0,31 |
-0,127 |
0,237 |
|
0,07 |
-0,875 |
-2,469 |
0,32 |
-0,105 |
0,230 |
|
0,08 |
-1,123 |
-1,980 |
0,33 |
-0,085 |
0,223 |
|
0,09 |
-1,242 |
-1,549 |
0,34 |
-0,067 |
0,216 |
|
0,10 |
-1,274 |
-1,184 |
0,35 |
-0,051 |
0,208 |
|
0,11 |
-1,251 |
-0,883 |
0,36 |
-0,036 |
0,199 |
|
0,12 |
-1,195 |
-0,637 |
0,37 |
-0,023 |
0,191 |
|
0,13 |
-1,121 |
-0,439 |
0,38 |
-0,011 |
0,182 |
|
0,14 |
-1,038 |
-0,280 |
0,39 |
0,000 |
0,174 |
|
0,15 |
-0,952 |
-0,153 |
0,4 |
0,010 |
0,165 |
|
0,16 |
-0,868 |
-0,053 |
0,41 |
0,019 |
0,157 |
|
0,17 |
-0,786 |
0,025 |
0,42 |
0,027 |
0,148 |
|
0,18 |
-0,710 |
0,087 |
0,43 |
0,033 |
0,140 |
|
0,19 |
-0,638 |
0,135 |
0,44 |
0,040 |
0,132 |
|
0,20 |
-0,571 |
0,171 |
0,45 |
0,045 |
0,124 |
|
0,21 |
-0,510 |
0,199 |
0,46 |
0,050 |
0,116 |
|
0,22 |
-0,454 |
0,219 |
0,47 |
0,054 |
0,108 |
|
0,23 |
-0,403 |
0,234 |
0,48 |
0,058 |
0,101 |
|
0,24 |
-0,356 |
0,244 |
0,49 |
0,061 |
0,094 |
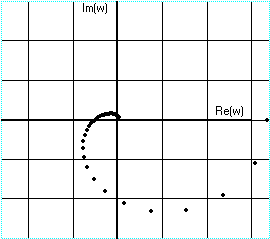
Рисунок 2 - АФЧХ линейной части системы
По АФЧХ определяем параметры автоколебаний, возможных в данной системе:
Aвых= 0,8694699;
ωвых = 0,16.
Рассчитанная ωвых не совпадает с заданной.
Автоколебания
с заданными параметрами в системе с
нелинейными элементами типа трехпозиционного
реле, двухпозиционное реле, зоны
нечувствительности невозможны, т.к.
параметры автоколебаний, находящиеся
на пересечении графиков АФЧХ объекта
![]() и
инверсной комплексной характеристики
нелинейного элемента
и
инверсной комплексной характеристики
нелинейного элемента
![]() отличаются от заданных.
отличаются от заданных.
2 Определение параметров автоколебаний для трёх позиционного реле с зоной нечувствительности и зоной возврата;
Строим АФЧХ линейной части. Для разных значений параметров нелинейного элемента строим АФЧХ инверсной комплексной характеристики нелинейного элемента. При различных параметрах нелинейного элемента не удалось добиться совпадения частоты и амплитуды автоколебаний с заданными.
Следовательно, автоколебания при заданных значениях частоты и амплитуды не возможны.
Приведем график при следующих параметрах: b = 0,029; c = 0,01 ; m = 0,1
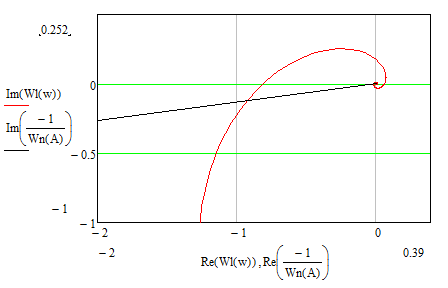
Рисунок 3 – АФЧХ линейной и нелинейной части системы
По рисунку 2 определяем параметры автоколебаний, возможных в данной системе:
ωвых = 0,16 с-1 ; Aвых= 0,8694699;
ВЫВОД
Автоколебания
с заданными параметрами в системе с
нелинейными элементами типа двух-,
трехпозиционное реле, трёх позиционного
реле с зоной нечувствительности и зоной
возврата невозможны, т.к. параметры
автоколебаний, находящиеся на пересечении
графиков АФЧХ объекта
![]() и
инверсной комплексной характеристики
нелинейного элемента
и
инверсной комплексной характеристики
нелинейного элемента
![]() отличаются от заданных.
отличаются от заданных.