

Кинематический анализ механизма.
Дифференцируя групповые уравнения, находим величину угловых и линейных скоростей и ускорений точек звеньев механизма:
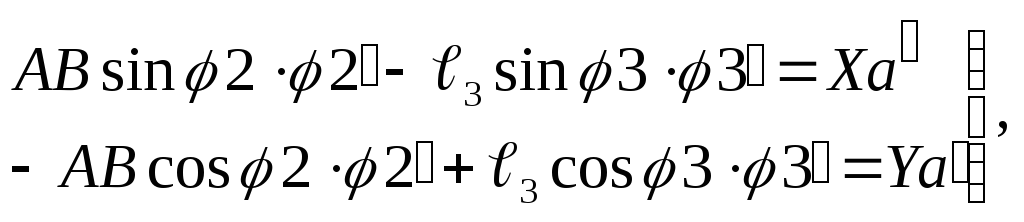
Кинематический анализ группы ввв

![]()
Используя теорему Крамера, вычислим значения первой и второй производных углов φ2 , φ3.
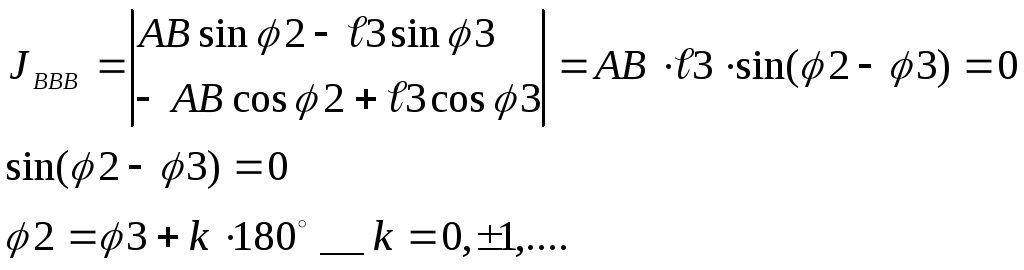
Запишем Якобиан уравнений группы ВВВ.

![]()
![]()
![]()
Величины
![]() и
и![]() являются
аналогами угловых скоростей звеньев 2
и 3.
являются
аналогами угловых скоростей звеньев 2
и 3.
![]()
![]()
![]()
![]()
Величины
![]() и
и![]() являются
аналогами угловых ускорений звеньев 2
и 3.
являются
аналогами угловых ускорений звеньев 2
и 3.
![]()
![]()
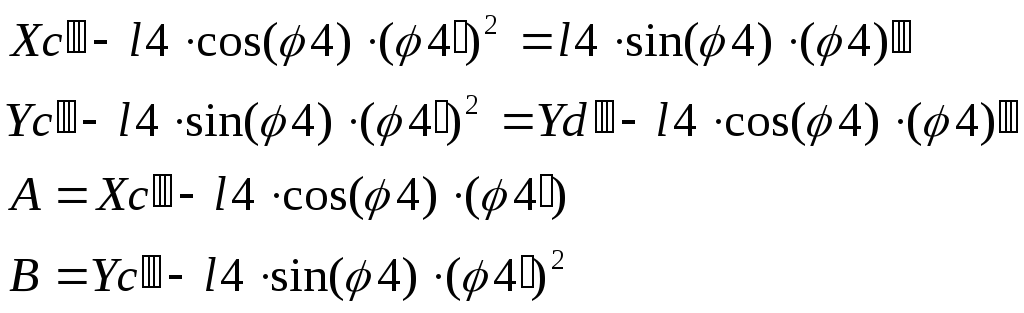
Кинематический анализ группы ввп.
Дифференцируя дважды по q уравнения геометрического анализа для группы ВВП, получаем:
![]()
![]()
![]()
Запишем Якобиан уравнений группы ВВП.
![]()
![]()
![]()
Величина
![]() является аналогом скорости точкиDползуна, имеющего лишь вертикальное
перемещение.
является аналогом скорости точкиDползуна, имеющего лишь вертикальное
перемещение.
![]()
Величина
![]() является
аналогом угловой скорости звена 4.
является
аналогом угловой скорости звена 4.
![]()
![]()
Величина
![]() является
аналогом углового ускорения звена 4.
является
аналогом углового ускорения звена 4.
![]()
Величина
![]() является аналогом ускорения точкиDползуна, имеющего лишь вертикальное
перемещение.
является аналогом ускорения точкиDползуна, имеющего лишь вертикальное
перемещение.
![]()
![]()
Особые положения.
Особые положения группы ввв.
Группа ВВВ попадает в особое положение при равенстве Якобиана групповых уравнений:
Особые положения группы ввп.
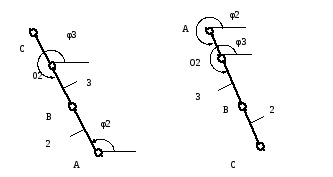
Расположение "пассивных" шарниров А, В, С на одной прямой - геометрический признак особого положения группы ВВВ.
Особое положение группы ВВП имеет место при выполнении условия равенства нулю Якобиана групповых уравнений:
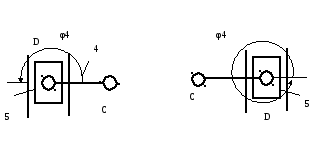
Крайние положения механизма.
Механизм может находится в двух крайних положениях :
Ползун находится в наиболее удаленном положении от оси Y, т.е.Yd=Ymax.
Это происходит при
![]()
Ползун находится в наиболее близком положении от оси Y, т.е.Yd=Ymin.
Это происходит при
![]()
Таблица сравнения результатов графического и аналитического методов определения кинематических параметров механизма.
|
Параметр |
Значение параметра | ||
|
MathCAD |
Excel |
Графоаналитический Метод. | |
|
XA |
-0,1732051 |
-0,1732051 |
-0,173 |
|
YA |
0,1 |
0,1 |
0,1 |
|
XA׳ |
-0,1 |
-0,1 |
-0,1 |
|
YA׳ |
-0,1732051 |
-0,1732051 |
-0,173 |
|
XA״ |
0,1732051 |
0,1732051 |
0,173 |
|
YA״ |
-0,1 |
-0,1 |
-0,1 |
|
Xb |
-1,0511531 |
-1,0511531 |
-1,051 |
|
Yb |
-0,0980083 |
-0,0980083 |
-0,098 |
|
Xb׳ |
-0,137 |
-0,1365483 |
-0,138 |
|
Yb׳ |
-0,01115 |
-0,0111536 |
-0,01 |
|
Xb״ |
0,172 |
0,1718398 |
0,181 |
|
Yb״ |
0,0454236 |
0,0454236 |
0,047 |
|
XC |
-1,6364518 |
-1,6364518 |
-1,63 |
|
YC |
-0,2300139 |
-0,2300139 |
-0,23 |
|
XC׳ |
-0,1609139 |
-0,1609139 |
-0,16 |
|
YC׳ |
0,0968807 |
0,0968807 |
0.091 |
|
XC״ |
0,1709296 |
0,1709296 |
0,17 |
|
YC״ |
0,1423727 |
0,1423727 |
0,15 |
|
φ2 |
192,71 |
192,71 |
192,71 |
|
φ2׳ |
-0,185 |
-0,18458 |
-0,188 |
|
φ2״ |
-0,158 |
-0,158 |
-0,144 |
|
φ3 |
274,67 |
274,67 |
274,67 |
|
φ3׳ |
-0,228 |
-0,22833851 |
-0,216 |
|
φ3״ |
0,292 |
0,2916123 |
0,311 |
|
φ4 |
64,122 |
64,122 |
64,122 |
|
φ4׳ |
-0,179 |
-0,178847 |
-0,166 |
|
φ4״ |
0,1744 |
0,1744629 |
0,191 |
|
YD |
0,6697138 |
0,6697138 |
0,678 |
|
YD׳ |
0,019 |
0,0188224 |
0,022 |
|
YD״ |
0,190 |
0,1897383 |
0,190 |