

Древс Системы реалного времени технические и программные средства 2010
.pdfСуществует целый ряд датчиков, непосредственно преобразующих входной сигнал в цифровой код. Примером может служить датчик угла поворота, изображенный на рис. 2.4. Кодовый диск разделен на дорожки, которые подсвечиваются газоразрядной лампой. Дорожки имеют прозрачные и непрозрачные сектора. Общий световой поток модулируется этими секторами, в результате чего на многоточечный фотоэлемент попадают отдельные потоки, несущие цифровой сигнал (рис. 2.5).
Рис. 2.5
2.6. Потенциометрические датчики
Резисторный потенциометр со скользящим контактом – один из наиболее простых и эффективных преобразователей перемещения. Он представляет собой резистор постоянного сопротивления, выполненный из высокоомной проволоки или пленочного проводящего пластика, по которому перемещается скользящий электрический контакт. Этот контакт механически соединяется с деталью, перемещения которой датчик должен измерять; от нее скользящий контакт электрически изолируется. Величина сопротивления R ме-
31
жду скользящим контактом и одним из концов резистора является функцией, с одной стороны, положения скользящего контакта и, с другой стороны, конструкции резистора.
В зависимости от формы резистора и, следовательно, от траектории перемещения скользящего контакта, различают потенциометры линейного и углового перемещения. Если резистор имеет однородную конструкцию, то потенциометр линеен. Значение сопротивления потенциометра чаще всего заключено в интервале от 20 Ом до 200 кОм. Для обмотки используют провод из константана, манганина, нихрома, а также сплавы из платины, серебра и т.п. Проводящий пластик имеет более высокую температурную зависимость по сравнению с проволокой.
Функция преобразования потенциометрического датчика имеет вид:
Uвых = (U/l)X = kX,
где Uвых – выходное напряжение; U – питающее напряжение; l – длина намотки обмотки; X – перемещение движка реостата; k – коэффициент преобразования.
Рабочий диапазон потенциометра – это область изменения x, в которой R(x) является линейной функцией перемещения. Нелинейность составляет 0,1…1 % для проволочных сопротивлений и около 0,05 % для проводящего пластика. Разрешение определяется максимальным перемещением, необходимым для перехода скользящего контакта из определенного положения в ближайшее соседнее; оно зависит от формы и размеров проволоки и скользящего контакта и может меняться по мере их износа. Для проволочных сопротивлений оно составляет 1,5…0,5 мм. Разрешение датчика можно улучшить по сравнению с разрешением потенциометра, если посредством рычага или зубчатой передачи увеличить масштаб перемещения скользящего контакта по сравнению с перемещением точки касания датчика.
Ширина контактной полосы, по которой перемещается движок, в 2…3 раза превышает диаметр провода. Ее получают полировкой вдоль витков тонкой наждачной бумагой.
Подвижный контакт (щетка, движок) выполняют в виде двух– трех параллельных проволочек диаметром 0,1…0,2 мм, несколько
32

отличающихся по длине, или из специально профилированной пластины с разрезами. Максимально допустимая скорость движения скользящего контакта определяет максимальную частоту перемещений, при которой еще допустимы измерения с помощью потенциометра; эта частота обратно пропорциональна амплитуде перемещений и имеет порядок килогерц. Срока службы потенциометра зависит от его типа и лежит в пределах от 106 до 108 перемещений.
Для получения выходного сигнала, изменяющегося по определенному закону, применяют функциональные потенциометрические датчики. В этих датчиках зависимость сопротивления обмотки от перемещения движка является нелинейной. Требуемая нелинейность обеспечивается различными способами: изменением профиля каркаса; изменением материала или размера провода; изменением шага намотки или длины витка.
На рис. 2.6 показан потенциометрический датчик угловых перемещений: 1 – каркас, 2 – обмотка, 3 – щетка, 4 – дополнительная щетка для снятия сигнала, 5 – токосъемное кольцо.
К достоинствам проволочных реостатных преобразователей можно отнести: простоту конструкции; малые размеры и массу; возможность получения необходимых функцио-
нальных зависимостей относительно простыми средствами; получение высокоточных линейных статических характеристик; стабильность характеристик.
Потенциометрические схемы имеют и недостатки. Первый недостаток – нелинейность
характеристики – можно ослабить, шунтируя верхнее плечо потенциометра резистором R = Rн. На рис. 2.7 показана схема такого включения, а на рис. 2.8 – соответствующие зависимости (α = X/l,
β = Rн/Rп).
Второй недостаток – ступенчатая зависимость (с перемежающимися малыми и большими скачками) напряжения от перемещения движка из-за периодического замыкания двух соседних витков
33
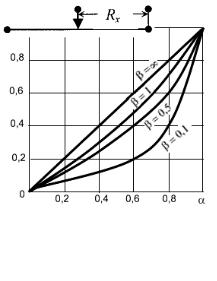
Рис. 2.8
Рис. 2.9
высокий порог чувствительности;
при определенных положениях движка. Его можно уменьшить путем применения более тонкого провода (практический предел – 50 витков/мм, что соответствует разрешению 20 мкм) или применением реохорда (рис. 2.9).
Третий недостаток – наличие скользящего контакта – может стать причиной отказа из-за окисления контактной дорожки, перетирания витков или отгибания движка;
Также к недостаткам можно отнести:
- сравнительно небольшой коэффициент преобразования и
-наличие шума; подверженность электроэррозии под действием под действием импульсных разрядов;
-ограниченную скорость линейного перемещения или вращения (до 100…200 об/мин) токосъемника вследствие его вибраций при переходе с витка на виток и повышение при этом уровня динамического шума;
-низкую износоустойчивость.
2.7. Тензометрические датчики
Эти преобразователи используют тензорезистивный эффект – изменение активного сопротивления проводниковых и полупроводниковых материалов под действием механической деформации. Тензодатчик состоит из тонкой проволоки, фольги или полоски полупроводника, прикрепленной к подложке или нанесенной на нее (например, напылением) (рис. 2.10).
34

Датчик жестко закрепляется на деформируемой поверхности, причем жесткость подложки должна быть большей по сравнению с жесткостью чувствительного элемента, но меньшей по сравнению с жесткостью поверхности измеряемого объекта. Это обеспечивает равенство деформаций датчика
иобразца в области закрепления датчика.
Впростейшем случае датчик состоит из сетки, образованной нитевидными провод-
никами с удельным сопротивлением ρ, площадью поперечного сечения s и длиной nl,
где l – длина одного нитевидного элемента, n – их количество; для металлических датчиков n = 10...20, для полупроводниковых n = 1. Сетка наносится на изолирующую подложку – бумагу или пластик, которая наклеивается на исследуемый образец. Датчик испытывает такую же деформацию l/l, как и образец, в направлении, параллельном нитям.
Для изготовления металлических резисторных датчиков обычно используют сплавы на основе никеля; диаметр проволоки составляет около 20 мкм, толщина подложки – около 0,03 мм для пластика и 0,1 мм для бумаги.
Сопротивление преобразователя длины L с удельным сопротивлением ρ равно
L dl
R =ρ∫0 dS(l) ,
где S(l) – сечение. При растяжении изменяется L, S и ρ (из-за деформации кристаллической решетки) и при S(l) = S сопротивление датчика изменяется на величину
R = Δρ |
l |
+ l |
ρ |
− S |
ρl |
. |
S |
S |
|
||||
|
|
|
S 2 |
|||
Введем коэффициент Пуассона σ = − ( D/D)/( L/L) – отношение относительного изменения диаметра к относительному изменению длины и получим относительное изменение R:
R/R = [(1+2σ) L/L+Δρ/ρ].
35
Коэффициент тензочувствительности
G = ( R/R)/( L/L) = 1 + 2σ + (Δρ/ρ)/( L/L)
для большинства металлов (σ ≈ 0,3) лежит в пределах 1,6...6. Значительно большие значения у полупроводниковых материалов (изза одновременного изменения ρ), например, для германия G ≈ 100, однако это достоинство «компенсируется» большой зависимостью ρ от температуры и большей нелинейностью.
Неправильная установка тензодатчика на объекте может привести к значительным погрешностям из-за ползучести материалов, влияния влаги, плохой электрической изоляции от контролируемого участка и ряда других факторов.
Важное значение имеет и ориентация тензодатчика. Поскольку между измерительными нитями имеются участки проводников, перпендикулярные общему направлению, возникает чувствительность к поперечным деформациям. Для проволочных датчиков соответствующий коэффициент тензочувствительности Gt ≈ 0,02G. Чтобы уменьшить этот эффект, поперечные части проводника делаются шире продольных.
Частотные ограничения зависят от способа закрепления и размеров датчика: длина резисторных полосок должна быть гораздо меньше длины волны механических колебаний с тем, чтобы измеряемая под датчиком деформация была практически однородна. Учитывая это правило, максимальная частота вибрации при использовании датчика длиной l определяется соотношением fmax = = V/10 l, где V – скорость звука в материале образца (например, для стали V = 5810 м/с).
Многократное повторение противоположных по знаку деформаций приводит к постепенному возрастанию собственного сопротивления датчика. Предел усталости датчика понимают как число N циклов деформации заданной амплитуды, которые приводят к изменению сопротивления, эквивалентному деформации 10–4. Он зависит от материала датчика и амплитуды деформаций и лежит в диапазоне от 104 до 108 циклов.
Для измерения сигнала тензодатчиков применяют мостовые схемы включения, причем следует иметь в виду, что тензодатчики
– элементы с низким сопротивлением (от 120 до 350 Ом); это озна-
36

чает, что падение напряжения в проводах, соединяющих источник питания с мостом, может стать причиной погрешностей измерения. Полный выходной сигнал типичного тензометрического датчика мостового типа равен 3...4 мВ на 1 В напряжения питания мостовой схемы.
Для повышения чувствительности применяют дифференциальную схему включения: датчики с сопротивлениями R1 и R3 устанавливаются в области растяжения от действия силы F, а датчики с сопротивлениями R2 и R4 – в области сжатия (рис. 2.11, а). Условие баланса моста (R1R3 = R2R4) нарушается весьма сильно (рис. 2.11, б).
а |
б |
Рис. 2.11
Погрешности тензорезисторов могут быть вызваны изменениями температуры. Для уменьшения этого влияния применяют компенсационную схему включения (рис. 2.12): рабочий датчик с сопротивлением Rр накладывается в направлении действия усилия, а компенсирующий Rк – в перпендикулярном направлении. При деформации детали изменяется Rр, при изменении температуры изменяются оба сопротивления.
К достоинствам тензорезисторов можно отнести незначительную массу, малые размеры,
простоту конструкции, возможность измерения статических и динамических процессов; к недостаткам – относительно невысокую чувствительность, возможность только разового использования, необходимость использования мостовой измерительной схемы и компенсации температурных воздействий.
37
2.8.Электромагнитные датчики
2.8.1.Принцип действия
Как известно, обмотка, имеющая w витков, при протекании по ней тока I, создает магнитный поток в сердечнике
Φ = Iw/Rм ,
где Rм – магнитное сопротивление сердечника:
Rм = lср/μS ,
где lср – средняя длина магнитной линии, μ – магнитная проницаемость сердечника, S – площадь поперечного сечения сердечника.
Электромагнитные датчики предназначены для преобразования перемещения в электрический сигнал за счет изменения параметров электромагнитной цепи. Эти изменения могут заключаться в увеличении или уменьшении магнитного сопротивления датчика или потокосцепления обмотки. В результате таких перемещений изменяется индуктивность обмотки L или ее взаимоиндукция М с обмоткой возбуждения. Поэтому электромагнитные датчики часто называют индуктивными.
Электромагнитные датчики обычно рассматриваются как параметрические, поскольку изменяются величины L и М, но электромагнитные датчики с изменяющейся взаимоиндукцией можно отнести и к генераторному типу, поскольку в результате изменяется и ЭДС обмотки. Так как эта ЭДС появляется за счет изменения коэффициента взаимоиндукции с обмоткой возбуждения, то такие электромагнитные датчики называют трансформаторными.
К генераторным относятся и индукционные датчики, в обмотках которых генерируется ЭДС в зависимости от скорости перемещения. Изменение индуктивности и взаимоиндукции может происходить и под влиянием механических напряжений в сердечнике электромагнитного датчика. Такие напряжения приводят к изменению магнитной проницаемости ферромагнитного материала сердечника. Электромагнитные датчики, основанные на таком физическом явлении, называются магнитоупругими датчиками.
Индуктивность L катушки с сердечником зависит от количества ее витков w и магнитного сопротивления магнитной системы Rм:
38

L = w2/Rм. В свою очередь, величина Rм зависит от длины магнитопровода и магнитной проницаемости μ. Так, магнитопровод в форме П-образного сердечника с якорем при наличии воздушного зазора δ между сердечником и якорем имеет магнитное сопротивление
Rм = μlсS + μ2вδS ,
где l – общая длина сердечника, S – площадь сечения магнитопровода, μс и μв – магнитная проницаемость сердечника и воздуха соответственно.
Поскольку μс >> μв, то для разомкнутого магнитопровода
L ≈ w2 μвS , а для замкнутого магнитопровода L ≈ w2 μсS . В пере- 2δ l
мещении, которое предполагается измерить, участвует один из элементов магнитного контура. Перемещение якоря (изменение величины зазора δ) изменяет индуктивность и, следовательно, может быть измерено. Для измерения индуктивностей и их изменений используются различные балансные мостовые схемы. На результат оказывают влияние такие факторы как наличие распределенной емкости, потери энергии в проводе обмотки и в сердечнике (из-за токов Фуко и магнитные потери).
К недостаткам индуктивных датчиков относят:
-постоянно действующую на якорь электромагнитную силу, стремящуюся притянуть его к ярму; она пропорциональна квадрату напряжения питания и обратно пропорциональна квадрату частоты питания;
-независимость фазы выходного сигнала от направления перемещения якоря.
Общие замечания по применению индуктивных датчиков:
1)поскольку ферромагнитные материалы – самые малошумящие, на их основе можно изготовить очень чувствительные датчи-
ки (до 10−5 мм); 2) по самой своей природе индуктивные датчики, с одной сто-
роны, чувствительны к внешним электромагнитным полям, а с другой – способны сами их индуцировать. Поэтому индуктивные дат-
39

чики необходимо помещать внутри кожуха, служащего магнитным экраном;
3)индуктивные датчики имеют малое выходное сопротивление
ивысокий КПД;
4)габариты индуктивных датчиков обратно пропорциональны частоте возбуждения.
2.8.2. Дифференциальные индуктивные датчики
Дифференциальные индуктивные датчики представляют собой совокупность двух одинарных нереверсивных датчиков с общим якорем [1]. Они обладают реверсивной статической характеристикой и компенсируют электромагнитную силу притяжения якоря. Оба сердечника в такой схеме (рис. 2.13) идентичны по своим конструктивным и магнитным параметрам. Расположенные на них обмотки w1 и w2 имеют также одинаковые параметры и включены встречно. Сопротивление Rн включается между средней точкой трансформатора и средней точкой об-
Рис. 2.13 моток преобразователя.
В такой схеме ток Iвых, протекающий по сопротивлению нагрузки, равен разности токов правой и левой половин схемы. В векторной форме это равенство примет следующий вид:
Iвых = I1 − I2 ,
а выходное напряжение
Uвых = Rн(I1 − I2 ).
При отсутствии входного сигнала зазоры δ1 и δ2 между якорем и ярмом одинаковы: δ1= δ2 = δ0. Равны и индуктивности L1 и L2 обеих половин датчика, определяемые размерами зазоров. Следовательно, выходное напряжение преобразователя Uвых = 0. При перемещении якоря на расстояние X зазоры δ1 и δ2 становятся неравными: δ1 = δ0 + X; δ2 = δ0 – X. Изменение зазоров приводит к изменению
40