

2.4 Создание инвариантных су
Основоположником теории инвариантности является В.Г. Щипанов, опубликовавший свою первую работу в 1939 году. Однако она подверглась резкой критике многих ученых (Н.Н. Вознесенского, А.В.Михайлова, Е.Л.Николаи, Ф.Ф.Гантмахера). Расхождение во взглядах ученых основывалось на том, что они смешивали две различные постановки задачи. В.Г. Щипанов решал задачу об устранении вынужденной составляющей отклонения регулируемой величины, а в критических работах рассматривалась задача о тождественном равенстве нулю общего решения, т.е. суммы свободной и вынужденной составляющей.
В настоящее время существует три направления создания инвариантных САУ:
1. Системы с одной регулируемой величиной, работающие по отклонению. В таких системах условие абсолютной инвариантности достигается при коэффициенте усиления разомкнутой САУ равном бесконечности.
2. Создание комбинированных систем.
3.![]() Использование
принципа двухканальности Б.Н.Петрова
в многосвязных системах.
Использование
принципа двухканальности Б.Н.Петрова
в многосвязных системах.
САУ называется инвариантной по отношению к возмущающему воздействию, если после завершения переходного процесса, определяемого начальными условиями, регулируемая величина и ошибка системы не зависят от этого воздействия.
САУ называется инвариантной по отношению к задающему воздействию, если после завершения переходного процесса, определяемого начальными условиями, ее ошибка не зависит от этого воздействия.
При нулевых начальных условиях
![]()
где
![]() - передаточная функция САУ,
- передаточная функция САУ,
![]()
В соответствии с правилами определения оригинала функции при отсутствии кратных корней
![]() (11)
(11)
где
![]() -корни
полинома
-корни
полинома![]() ;
;![]() -корни
полинома
-корни
полинома![]() .
.
Вынужденная составляющая будет тождественно равна нулю, если:
![]() - входное воздействие
отсутствует;
- входное воздействие
отсутствует;
![]() - условие абсолютной инвариантности
(равенство нулю передаточной Функции
замкнутой САУ по отношению к возмущающему
воздействию).
- условие абсолютной инвариантности
(равенство нулю передаточной Функции
замкнутой САУ по отношению к возмущающему
воздействию).
Корни
![]() совпадают с корнями и
совпадают с корнями и![]() и сомножители, соответствующие им, можно
сократить. Этот случай соответствует
частичной инвариантности, когда САУ
будет инвариантна только к определенному
виду возмущений.
и сомножители, соответствующие им, можно
сократить. Этот случай соответствует
частичной инвариантности, когда САУ
будет инвариантна только к определенному
виду возмущений.
Под частичной
инвариантностью (до
![]() )
понимается не тождественное равенство
нулю вынужденной составляющей, а
приближенное, мерой выполнения которого
является некоторая величина
)
понимается не тождественное равенство
нулю вынужденной составляющей, а
приближенное, мерой выполнения которого
является некоторая величина![]() .
.
2.5 Создание комбинированных сау
Основным методом, используемым при создании инвариантных систем, является применение комбинированного управления, при котором управляющее воздействие реализуется не только по отклонению регулируемой величины, но и по возмущению, для этого измеряется основное возмущающее воздействием и сигнал через корректирующее звено вводится в САУ.
При этом реализуется принцип двухканальности и не возникает противоречия между устойчивостью и инвариантностью, как это имеет место в одноконтурных системах, реализующих условие инвариантности за счет повышения коэффициента усиления системы. Введение сигнала по задающему или возмущающему воздействиям (рисунок 5,6) позволяет получить абсолютную инвариантность САУ. В терминах передаточных функций ранее данные определения инвариантности можно сформулировать следующим образом:
САУ инвариантна к задающему воздействию, если ее передаточная функция по отношению к нему равна единице;
САУ инвариантна к возмущающему воздействию, если ее передаточная функция по отношению к нему равна нулю.
Условия реализации абсолютной инвариантности легко проследить на примерах (рисунок 5,6).
Для системы (рисунок
5)
![]()
Отсюда
![]() (12)
(12)
Для системы (рисунок 6):
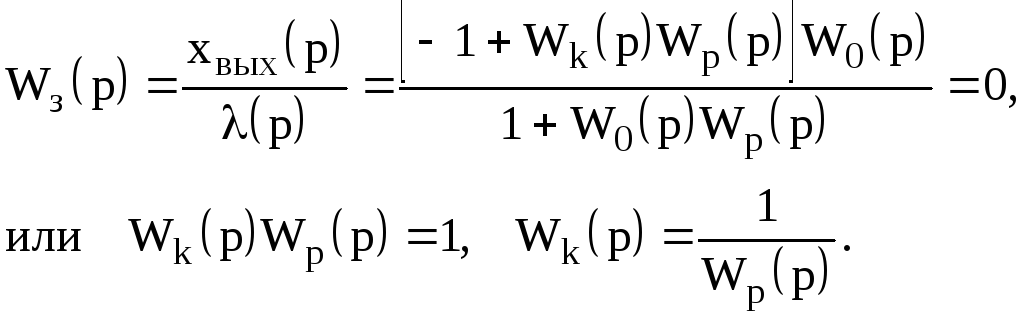 (13)
(13)
Введение дополнительных воздействий не изменяет характеристического уравнения замкнутой САУ, поскольку корректирующие звенья не входят в замкнутый контур прохождения сигнала. При этом не будет нарушаться не только устойчивость САУ, но и сохраняться оценки качества переходного процесса, базирующиеся на использовании корней характеристического уравнения.
Однако при создании
инвариантных САУ очень остро возникает
вопрос физической реализуемости
![]() .
Поскольку для физической реализации
передаточной функции
.
Поскольку для физической реализации
передаточной функции
 необходимо, чтобы
необходимо, чтобы
![]() ,
то при реализации условия абсолютной
инвариантности
,
то при реализации условия абсолютной
инвариантности![]() сталкиваются с затруднениями реализации
производных. Например, если
сталкиваются с затруднениями реализации
производных. Например, если
![]() Это звено физически
реализуемо,
Это звено физически
реализуемо,
![]() .
Это реальное дифференцирующее звено.
.
Это реальное дифференцирующее звено.
Если
![]()
Если регулятор
обладает астатизмом
![]() -го
порядка, то
-го
порядка, то![]() должно реализовать производную
должно реализовать производную![]() -го
и выше порядков и не иметь производных
до
-го
и выше порядков и не иметь производных
до![]() порядка, что физически невозможно
реализовать.
порядка, что физически невозможно
реализовать.
В этом случае реализуется частичная инвариантность за счет замены идеальных дифференцирующих звеньев реальными.
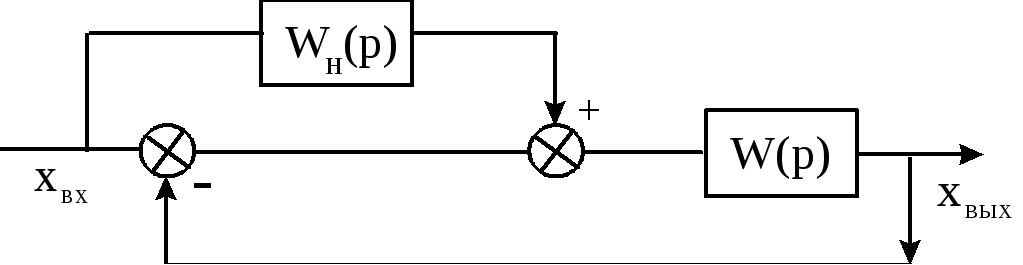
Рисунок 5 - Реализация инвариантности по заданию СУ
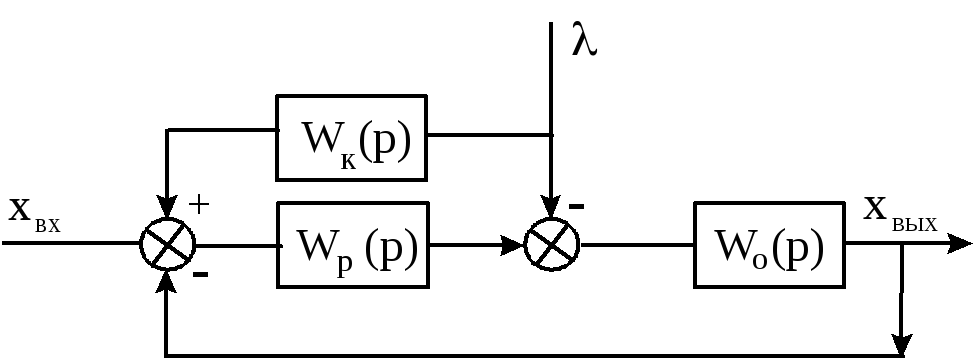
Рисунок 6 -Реализация инвариантной СУ по возмущению