

17.2. Тяговый баланс трактора и сопротивление рабочей машины
Машинно-тракторный агрегат представляет собой систему твердых тел, соединенных между собой упругими и жесткими устройствами. Движение и работа его возможны только в результате взаимодействия сил, действующих на агрегат. Источником энергии, затрачиваемой на выполнение работ, является химическая энергия топлива, которая преобразуется двигателем внутреннего сгорания в тепловую, а затем в механическую в виде вращающего момента М коленчатого вала. Вращающий момент передается полностью или частично (при наличии привода машин от ВОМ) на движитель трактора и создает движущую агрегат силу (рис. 17.1), которая сообщает трактору и машинам ускорение при трогании с места, а также преодолевает их сопротивление при установившемся движении.
Н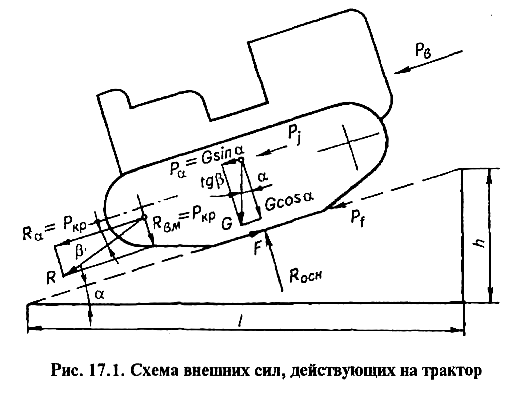 а
трактор помимо движущей силыF
в
плоскостях, параллельных плоскости
движения, действуют следующие силы:
тяговое
сопротивление Ra,
возникающее
в результате перемещения агрегата
и выполнения рабочей машиной
технологического процесса;
сопротивление движению трактора Pf,
возникающее
в результате деформации почвы ходовым
аппаратом, механических потерь
и т.д.; сопротивление воздушной среды
Рв;
сопротивление
подъему (спуску) трактора Ра
=
± G^sin
а (здесь G^
—
сила тяжести
трактора; а — угол склона, град) и сила
инерции Pj,
направленные
в сторону, противоположную направлению
ускорения.
а
трактор помимо движущей силыF
в
плоскостях, параллельных плоскости
движения, действуют следующие силы:
тяговое
сопротивление Ra,
возникающее
в результате перемещения агрегата
и выполнения рабочей машиной
технологического процесса;
сопротивление движению трактора Pf,
возникающее
в результате деформации почвы ходовым
аппаратом, механических потерь
и т.д.; сопротивление воздушной среды
Рв;
сопротивление
подъему (спуску) трактора Ра
=
± G^sin
а (здесь G^
—
сила тяжести
трактора; а — угол склона, град) и сила
инерции Pj,
направленные
в сторону, противоположную направлению
ускорения.
В направлении, перпендикулярном плоскости движения, действуют внешние силы: составляющая от воздействия рабочей ма
шины Rb.m'> составляющие реакции основания, действующие на ведущий и направляющий аппараты (для колесного трактора RB, для гусеничного RH или ^сн), и составляющая силы тяжести трактора GTpcos a.
Уравнение тягового баланса трактора имеет вид
![]() (17.1)
(17.1)
Знаки «+», «—» принимают соответственно при подъеме и спуске.
Если иметь в виду, что скорости движения машинно-тракторных агрегатов сравнительно небольшие, и допустить, что движение их равномерное (кроме процесса разгонами торможения), так называемое «установившееся», то сопротивление воздушной среды Рв и сила инерции Р, будут невелики и в практических расчетах ими можно пренебречь. Тогда уравнение тягового баланса трактора (17.1) примет вид
![]() (17.2)
(17.2)
При установившемся движении агрегата движущая сила равна суммарной силе сопротивления, т. е. F = Pz, а сила тяги на крюке
![]() (17.3)
(17.3)
Движущую силу F находят сравнением значений касательной силы на ободе ведущего колеса (ведущей звездочке) Ркас и силы сцепления ведущего механизма трактора с основанием Рсц. При Дас - ^сЦ сцепление достаточно и F = Ркас, а при Ркас > Рсц недостаточно и F=PCU. В первом случае Ркас может быть полностью использована для тяговой работы, а во втором только ее часть, равная Рсц.
Касательная сила тяги, Н, на ободе ведущего колеса (звездочке)
![]() (17.4)
(17.4)
где Neli — номинальная мощность двигателя, кВт; /Vp — общее передаточное число трансмиссии; г\м — механический КПД трансмиссии: для колесных тракторов 0,91...0,92, для гусеничных с учетом потерь в гусеницах 0,86...0,88; гк — радиус качения ведущего колеса (для гусеничных — радиус начальной окружности звездочки), м; пн — номинальная частота вращения коленчатого вала, мин"1.
Номинальная сила сцепления движителя с почвой, Н,
![]() (17.5)
(17.5)
где ц„
— номинальный коэффициент сцепления
движителя с почвой (табл. 17.1); Gcu
— сила тяжести трактора, приходящаяся
на ведущие колеса: для колесного трактора
с одной ведущей осью составляет (2/3)G^,,
д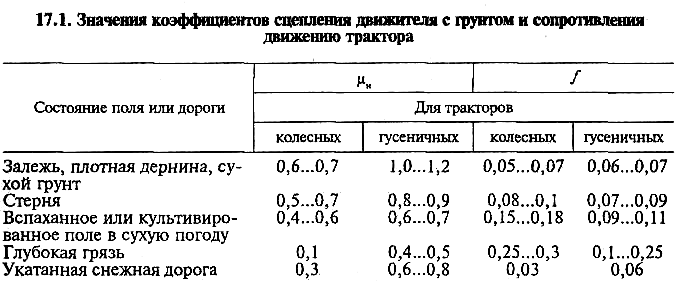 ля
гусеничного равноG^,
H.
ля
гусеничного равноG^,
H.
Сопротивление передвижению трактора, Н,
(17.6)
![]()
где/— коэффициент сопротивления движению трактора (табл. 17.1).
Сопротивление подъему (спуску) трактора, Н,
![]() (17.7)
(17.7)
При малых значениях а
![]()
где![]() [см.
рис. 17.1).
[см.
рис. 17.1).
При
достаточном сцеплении движителя с
почвой сила тяги на крюке
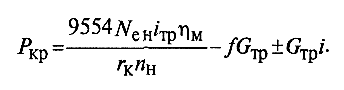
При работе трактора в заданных условиях на любой передаче силу тяги вычисляют по формуле
![]()
Предельные значения тягового усилия и движущей силы характеризуют эксплуатационные свойства трактора.
Тяговое сопротивление рабочей части агрегата Ra (сокращенно сопротивление агрегата) представляет собой сумму сопротивлений рабочих органов машины Rp, подъему ^ и перекатыванию Rf, т. е. Ra = Rp + Ra + Rf. На практике трудно отделить сопротивление рабочих органов от сопротивления перекатыванию, поэтому их определяют вместе, используя понятие удельного тягового сопротивления машины на ровной поверхности к. При этом удельное сопротивление однотипных машин, различающихся главным образом шириной захвата (боронование, посев и т. д.),
![]()
машин, различающихся шириной захвата и глубиной обработки (вспашка, лущение и т. д.),
![]()
где Ru, Rm —тяговое сопротивление рабочих машин, отличающихся соответственно шириной захвата или шириной и глубиной обработки почвы, Н; В — ширина захвата рабочей машины, м; а — глубина обработки почвы, м.
Тогда
сопротивление рабочей машины на ровной
поверхности соответственно![]()
При работе в агрегате нескольких машин, агрегатируемых с помощью сцепок, учитывают также сопротивление подъему и перекатыванию сцепок i^.
Тяговое сопротивление машины определяется из уравнения RM = <7Msin a = GMi (здесь GM — сила тяжести машины). При малом уклоне местности принимают а = /. Соответственно для сцепки сопротивление подъему Rac= Gc sin a = Gci, a сопротивление перекатыванию — RfC =fGc (здесь Gc — сила тяжести сцепки; /— коэффициент сопротивления качению сельскохозяйственной машины).
Исходя из этого, общее (среднее) сопротивление рабочей части агрегата, Н,
![]() (17.8)
(17.8)
Все приведенные формулы действительны для установившегося движения, когда ускорение равно нулю. При трогании с места сопротивление агрегата увеличивается за счет сил инерции Pj =gMJ (здесь Ми — приведенная масса рабочих машин; у —ускорение трогания).