

3.3. Математическая модель надежности объекта
Для анализа различных вариантов потери объектом работоспособности при эксплуатации целесообразно вначале представить этот процесс в общем виде как абстрактную математическую модель /2/.
Каждый объект характеризуется некоторой совокупностью выходных параметров X1, X2, … Xn , которые определяют его состояние и являются случайными функциями времени (наработки объекта). Поэтому надежность объекта как общая характеристика его состояния также меняется во времени.
Состояние
объекта в данный момент времени
(наработки) можно трактовать как точку
X(t)
в n-мерном фазовом пространстве его
выходных параметров с координатами
(X1,
X2,
… Xn),
а процесс потери объектом работоспособности
(изменения технического состояния
объекта) во времени может быть представлен
как однопараметрическое семейство
точек (параметр – время или наработка),
т.е. как кривая линия в n – мерном фазовом
пространстве. Можно ввести также понятие
о случайной вектор-функции
![]() с компонентами { X1(t),
X2(t),
… Xn(t)
}.
Начало вектора
с компонентами { X1(t),
X2(t),
… Xn(t)
}.
Начало вектора
![]() находится в начале координат, а конец
описывает во времени случайную кривую
- фазовую траекторию. В начальный момент
времениt
= 0 значения компонент вектора
находится в начале координат, а конец
описывает во времени случайную кривую
- фазовую траекторию. В начальный момент
времениt
= 0 значения компонент вектора
![]() равны начальным значениям выходных
параметров объекта.
равны начальным значениям выходных
параметров объекта.
В n-мерном фазовом пространстве можно выделить связное множество G - область работоспособности объекта. Границы этого множества определяются предельными допустимыми значениями выходных параметров объекта (Ximin, Ximax). Дополнение множества G до универсального множества всех возможных значений выходных параметров объекта U представляет собой область отказов Gот. Принадлежность данного состояния (точки в фазовом пространстве) X(t) области G означает, что объект находится в работоспособном состоянии; принадлежность точки X(t) границе области G (или переход через эту границу в область Gот) означает отказ объекта.
В качестве примера рассмотрим представленные на рис. 3.5 две реализации процесса потери работоспособности узла «вал - опоры» при параметрических отказах, вызванных износом подшипников /2/, когда предъявляются требования к точности вращения вала по двум основным параметрам: X1 = e - радиальное биение вала (эксцентриситет вращения) и X2 = - угол перекоса оси вала.
Начальное состояние объекта характеризуется значениями e0 и 0 и зависит от технологии изготовления и сборки узла и определяется соответствующими допусками. Отказ наступит, если любой из выходных параметров превзойдет допустимое значение emax или max , указанное в эксплуатационной документации.
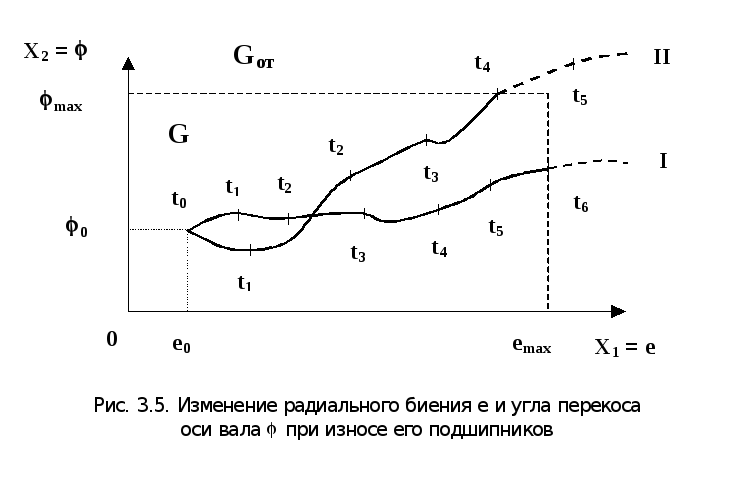
При износе подшипников изменяются как e , так и , причем в зависимости от величины и характера внешних нагрузок (равномерность усилий на передний и задний подшипники), условий эксплуатации и других факторов траектории случайного процесса X(t) в рассматриваемом двумерном фазовом пространстве выходных параметров объекта (плоскость) для различных экземпляров объектов могут иметь различный вид.
Реализация случайного процесса X(t) характерна для случая, когда износ переднего и заднего подшипника относительно равномерен, и поэтому угол перекоса оси вала меняется незначительно, а основную роль в потере работоспособности рассматриваемого узла играет радиальное биение вала e.
Реализация по типу имеет место при неравномерном износе подшипников, когда работоспособность данного узла лимитируется выходным параметром .
На траекториях отмечены точки через равные промежутки времени, показывающие, что процесс потери работоспособности объекта при реализации по типу идет быстрее. Отказ экземпляра объекта наступает в момент t4, а для экземпляра объекта отказ наступает в момент t6>t4 .
Рассматривая модель надежности объекта как эволюцию системы во времени в фазовом пространстве, акад. Б.В. Гнеденко /17/ для оценки в общем виде показателей надежности предложил использовать понятие функционала.
Считается, что функционал определен на процессе, если каждой случайной реализации (траектории) этого процесса X(t) ставится в соответствие некоторое число [X(t)]. Это число характеризует роль данной траектории в потере объектом работоспособности. Тот или иной показатель надежности определяется как математическое ожидание этого функционала, т.е.
![]() (3.3)
(3.3)
Например,
если функционал
равен случайной длительности пребывания
фазовой траектории процесса потери
работоспособности объекта в области G
, т.е. =1
– наработка до отказа, то M[]=![]() - средняя наработка до отказа.
- средняя наработка до отказа.
Если
же функционал
принять равным 1 при
![]() и равным нулю при
и равным нулю при![]() ,
то
,
то![]() - вероятность безотказной работы.
- вероятность безотказной работы.
Рассмотрим область работоспособности объекта (рис.3.6) в представлении n-мерного фазового пространства на плоскости (n=2) /2/.
Границы области G зависят от уровня требований к объекту. Более высокие требования к его выходным параметрам сужают область работоспособности. Например, область работоспособности прецизионного металлорежущего станка по параметрам, непосредственно влияющим на точность обработки, намного уже, чем область работоспособности станка нормальной точности. На рис. 3.6 показаны две области работоспособности: G1 - для нормального уровня требований к объекту и G2 - для повышенного уровня требований.
|
Рис. 3.6. Области работоспособности и состояний объекта
|
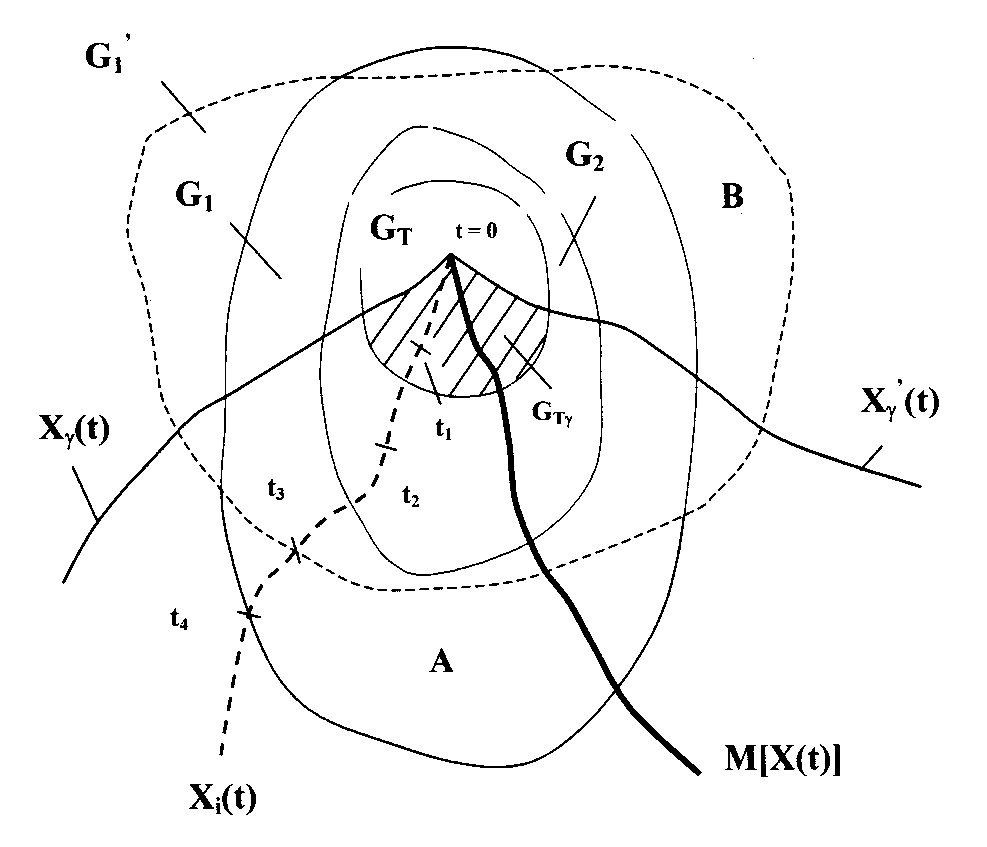
Следует также различать действительную область работоспособности G , которая реально определяет требуемую работоспособность объекта, и расчетную область работоспособности G’ , которая определяется требованиями документации к отдельным параметрам. Между этими областями в общем случае имеется различие, обусловленное тем, что при оценке работоспособности сложного объекта во многих случаях трудно назначить предельные значения отдельных параметров, выход из которых будет означать неработоспособность объекта в целом. Кроме того, часто критерий отказа устанавливается по косвенным показателям (расход смазки, уровень шума и вибраций и т.п.), которые дают весьма приближенную оценку действительной работоспособности.
В зависимости от соотношения границ областей действительной и расчетной работоспособности могут существовать: область неиспользованных возможностей А, когда по требованиям документации объект считается потерявшим работоспособность, хотя может еще нормально функционировать, и область неучтенных параметров В, когда согласно требованиям документации можно применять по назначению объект, который в действительности перешел в неработоспособное состояние.
Процесс потери объектом работоспособности характеризуется фазовой траекторией случайного процесса X(t). Для i-й реализации этой траектории (i-го экземпляра объекта) Xi(t) считается, что в момент t3 произошел отказ по требованиям, установленным в документации; действительный отказ i-го экземпляра объекта произошел в момент t4 .
Вероятностными характеристиками протекания случайного процесса потери работоспособности объекта во времени в представлениях n-мерного фазового пространства являются:
- математическое ожидание случайного процесса потери работоспособности M[X(t)], которое дает оценку того, как будет протекать процесс в среднем;
- гамма-процентная область работоспособности G - область, в которую реализации процесса попадают с вероятностью 100%. Границы этой области очерчены реализациями X(t) и X'(t) - верхней и нижней границами гамма-процентной области работоспособности. Поскольку уровень выбирается достаточно высоким (обычно =0,9 …0,99), считается, что отдельные реализации Xi(t) проходят вне области G только в экстремальных условиях эксплуатации или в случаях, когда объект имеет дефекты.
Область состояний GT - область в фазовом пространстве, в которой находятся все реализации случайного процесса Xi(t) к моменту времени (наработки) t=T.
Гамма-процентная область состояний GT - область в фазовом пространстве, в которой находятся 100% всех реализаций случайного процесса Xi(t) к моменту времени (наработки) t=T.
Возможны различные варианты отношений между областью работоспособности G и областью состояний GT объекта (рис. 3.7).
Если GT G (рис. 3.7,а), то объект считается устойчивым к отказам, так как вероятность отказа F(t)=0 (вероятность безотказной работы P(t)=1). В этой области характеристикой безотказности объекта является запас надежности KH>1 (см. разд. 2.4).
Случай, когда области G и GT соприкасаются (рис. 3.7,б), является предельным по устойчивости к отказам; запас надежности KH=1.
Если GT G (рис. 3.7,в), т.е. области G и GT пересекаются, то объект считается неустойчивым к отказам. В этой области запас надежности объекта считается исчерпанным, т.е. KH1, и наиболее информативным показателем безотказности является вероятность безотказной работы P(t)1.
|
а) б) в)
Рис.3.7. Варианты отношений между областью работоспособности G и областью состояний GT объекта (T1 < T2 < T3) |
