

1.1 Определение угловой скорости 3
|
|
(1.9) |
|
| |
|
| |
|
где: | |
|
| |
|
| |
|
|
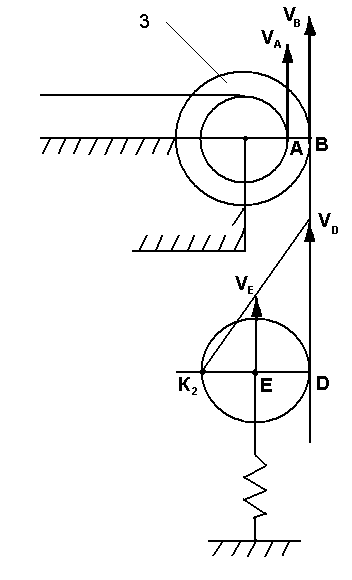
Все
перемещения выражаем через заданное
перемещение
![]() ,
учитывая, что зависимость между
перемещениями будет такой же, как между
соответствующими скоростями (рисунок
1.1):
,
учитывая, что зависимость между
перемещениями будет такой же, как между
соответствующими скоростями (рисунок
1.1):
![]() .
.
Так
как
![]() ,
то и
,
то и![]() .
.
![]() -
перемещение
точки Е (конца пружины).
-
перемещение
точки Е (конца пружины).
![]() ,
,
![]() (т.к.
точка
(т.к.
точка
![]() МЦС
блока 2).
МЦС
блока 2).
![]() .
.
![]() .
.
Тогда:
|
|
(1.10) |
|
|
|
Рисунок 1.1 |
Подставляя
в формулы (1.9) значения
![]() и
и![]() а так же считая
а так же считая![]() =0
из условия задачи, далее находим сумму
работ внешних сил:
=0
из условия задачи, далее находим сумму
работ внешних сил:
|
|
(1.11) |

Подставляем выражения (1.7) и (1.11) в уравнение (1.2)
|
|
(1.12) |

Из
равенства (1.12), подставив в него числовые
значения заданных величин, найдем
искомую угловую скорость
![]() :
:
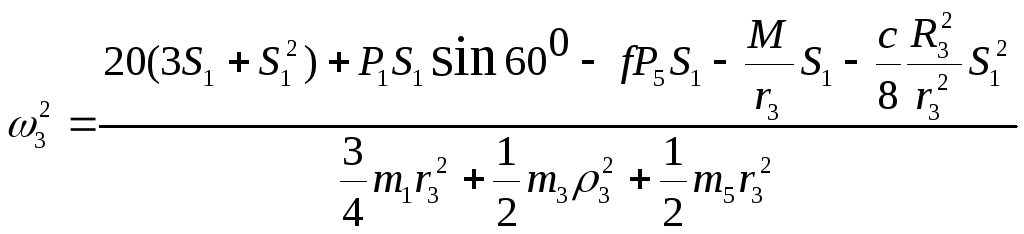 .
.

![]()
![]() рад/с.
рад/с.
1.2 Определение углового ускорения 3
Определяем
угловое ускорение
![]() ,
пользуясь выражением (1.12), составленным
по теореме об изменении кинетической
энергии.
,
пользуясь выражением (1.12), составленным
по теореме об изменении кинетической
энергии.
Преобразуем
правую часть уравнения , группируя
члены, содержащие перемещение
![]() и
и![]()
|
|
(1.13) |

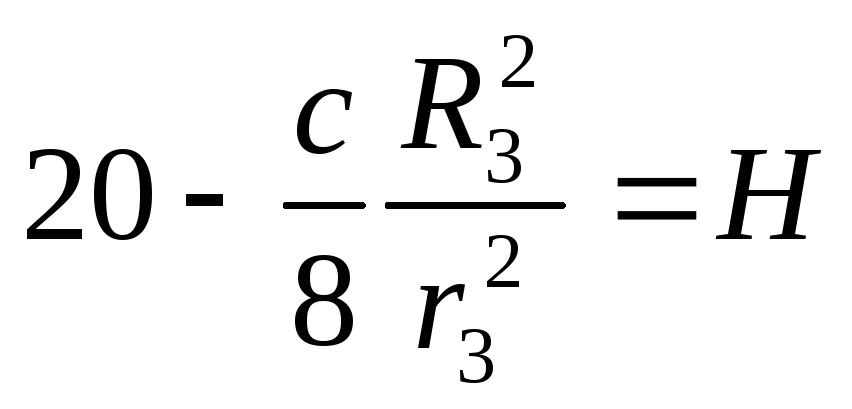
Введем обозначение постоянных множителей
|
|
(1.14) |
|
| |
|
|
 .
.Тогда выражение (1.13) запишется в следующем виде:
|
|
(1.15) |
Причем
(1.15) справедливо в любой момент, т.е.
![]()
![]() и
и![]() .
.
Дифференцируя (1.15) по времени получим:
|
|
(1.16) |
|
| |
|
|
Следовательно:
|
|
(1.17) |
Сокращая
на
![]() ≠
0, найдем искомое угловое ускорение:
≠
0, найдем искомое угловое ускорение:
|
|
(1.18) |


![]() рад/с2.
рад/с2.
2. Применение общего уравнения динамики
Применяем
общее уравнение динамики для определения
углового ускорения
![]() :
"При движении механической системы
с идеальными связями в каждый момент
времени сумма элементарных работ всех
активных сил и сил инерции на любом
возможном перемещении системы равна
нулю":
:
"При движении механической системы
с идеальными связями в каждый момент
времени сумма элементарных работ всех
активных сил и сил инерции на любом
возможном перемещении системы равна
нулю":
|
|
(2.1) |
К
активным силам относятся все силы
тяжести, сила
![]() ,
сила упругости, отнесем к ним момент
сил сопротивления и
,
сила упругости, отнесем к ним момент
сил сопротивления и![]()
![]()
Сила упругости, как произведение коэффициента жесткости на деформацию, равна :
![]()
где
![]() определяется по формуле (1.10), тогда:
определяется по формуле (1.10), тогда:
|
|
(2.2) |
Добавляем силы инерции :
-
главный вектор
![]() ;
;
-
главный момент сил инерции
![]() на катке 1;
на катке 1;
-
главный вектор сил инерций
![]()
![]() груза 5;
груза 5;
-
главный момент сил инерций
![]() на блоке 3.
на блоке 3.
|
|
|
Рисунок 2.1 |
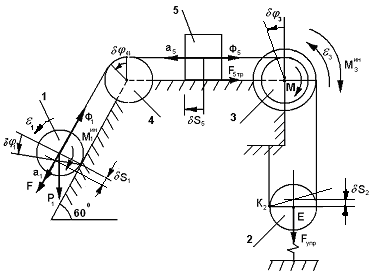
Даем
системе возможное перемещение - перемещаем
центр масс катка 1 на бесконечно малое
расстояние
![]() вниз по плоскости; это приводит к линейным
и угловым перемещениям всех тел системы.
вниз по плоскости; это приводит к линейным
и угловым перемещениям всех тел системы.
Составляем уравнение (2.1), где суммируются элементарные работы всех активных сил и сил инерции:
|
|
(2.3) |
Силы инерции:
|
|
(2.4) |
|
| |
|
| |
|
|
|
Все
ускорения, содержащиеся в формулах
(2.4), выразим через искомое ускорение
![]() ,
используя формулы связи скоростей
(стр.6) , найдем:
,
используя формулы связи скоростей
(стр.6) , найдем:
|
|
(2.5) |
|
|
Тогда:
|
|
(2.6) |
|
| |
|
| |
|
|
Все
возможные перемещения выражаем через
перемещение
![]()
![]()
![]() ,
, ![]() ,
,
![]() ,
, ![]() .
.
Подставляем
найденные значения в основное уравнение
(2.3) и делим на
![]() ≠0:
≠0:
|
|
(2.7) |
 .
.
|
|
(2.8) |
 .
.
Полученное выражение (2.8) для определения 3 совпадает с результатом (1.18) в первой части работы
![]() рад/с2.
рад/с2.