

3. Нормальное, тангенциальное и полное ускорения.
Движение тела характеризуется скоростью и ускорением, которые могут изменяться во времени. Пусть материальная точка движется по плоской криволинейной траектории с переменной по величине и направлению скоростью (рис. 4). Для характеристики степени криволинейности вводится понятие радиуса кривизны в данной точке траектории.
Радиусом кривизны R траектории называют радиус окружности, которая сливается с криволинейной траекторией на бесконечно малом ее участке.
В данной точке траектории касательная всегда перпендикулярна радиусу кривизны.
П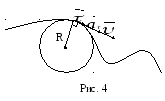 усть
и скорость, и ускорение меняются по
величине и направлению.
усть
и скорость, и ускорение меняются по
величине и направлению.
Мы знаем,
что ускорение тела при движении есть ![]() .
.
Вектор
скорости
![]() можно представить как произведение
модуля скорости
можно представить как произведение
модуля скорости
![]() и некоторого единичного вектора
и некоторого единичного вектора
![]() ,
сонаправленного с вектором линейной
скорости
,
сонаправленного с вектором линейной
скорости
![]() ,
направленного по касательной к траектории.
,
направленного по касательной к траектории.

Таким
образом, полное ускорение материальной
точки при криволинейном движении можно
представить в виде суммы двух слагаемых.
Первое слагаемое
![]() .
.
Вектор
![]() направлен по касательной к траектории
и называется тангенциальным
или касательным ускорением.
Его модуль равен
направлен по касательной к траектории
и называется тангенциальным
или касательным ускорением.
Его модуль равен
![]() ,
поэтому
,
поэтому
![]() характеризует быстроту изменения
скорости криволинейного движения только
по величине, так как вектор
характеризует быстроту изменения
скорости криволинейного движения только
по величине, так как вектор
![]() не изменяется.
не изменяется.
Следовательно,
можно заключить, что
![]() - тангенциальное ускорение, характеризует
изменение скорости по величине и
направлено по касательной к траектории.
- тангенциальное ускорение, характеризует
изменение скорости по величине и
направлено по касательной к траектории.
Второе
слагаемое
![]() называется нормальным
ускорением.
называется нормальным
ускорением.
Так
как вектор
![]() сонаправлен с вектором
сонаправлен с вектором
![]() ,
который определяет изменение направления
вектора линейной скорости, то он
характеризует изменение скорости
криволинейного движения по направлению.
,
который определяет изменение направления
вектора линейной скорости, то он
характеризует изменение скорости
криволинейного движения по направлению.
![]() .
.
![]()
 перпендикулярно
скорости, направлено вдоль радиуса
кривизны траектории к центру окружности.
перпендикулярно
скорости, направлено вдоль радиуса
кривизны траектории к центру окружности.
Полное ускорение материальной точки при криволинейном движении характеризует быстроту изменения скорости как по величине, так и по направлению (рис.6).
![]() ,
, ![]() .
.
4. Угловая скорость и угловое ускорение.
Поворот тела на некоторый угол можно задать в виде отрезка, длина которого равна , а направление совпадает с осью, вокруг которой производится поворот. Направление поворота и изображающего его отрезка связано правилом правого винта.
П ри
вращательном движении твердого тела
каждая точка движется по окружности,
центр которой лежит на общей оси вращения
(рис. 7). При этом радиус-вектор R,
направленный от оси вращения к точке,
поворачивается за время t
на некоторый угол .
Для характеристики вращательного
движения вводится угловая скорость и
угловое ускорение.
ри
вращательном движении твердого тела
каждая точка движется по окружности,
центр которой лежит на общей оси вращения
(рис. 7). При этом радиус-вектор R,
направленный от оси вращения к точке,
поворачивается за время t
на некоторый угол .
Для характеристики вращательного
движения вводится угловая скорость и
угловое ускорение.
У![]() гловой
скоростью
называется
векторная величина, равная первой
производной угла поворота тела по
времени:
гловой
скоростью
называется
векторная величина, равная первой
производной угла поворота тела по
времени:
Угол в 1 радиан – это центральный угол, длина дуги которого равна радиусу окружности; 360о = 2 рад.
Направление
угловой скорости задается правилом
правого винта:
вектор угловой скорости сонаправлен с
![]() ,
то есть с поступательным движением
винта, головка которого вращается в
направлении движения точки по окружности.
,
то есть с поступательным движением
винта, головка которого вращается в
направлении движения точки по окружности.
Линейная скорость точки связана с угловой скоростью:
![]() .
.
В
векторной форме
![]() .
.
Если в процессе вращения угловая скорость изменяется, то возникает угловое ускорение.
Угловое ускорение – векторная величина, равная первой производной угловой скорости по времени:
![]()
Вектор
угловой скорости сонаправлен с вектором
элементарного изменения угловой скорости
![]() ,
происшедшего за время dt.
,
происшедшего за время dt.
При
ускоренном движении вектор
![]() сонаправлен
сонаправлен
![]() (рис.
8), при замедленном – противонаправлен
(рис. 9).
(рис.
8), при замедленном – противонаправлен
(рис. 9).


Найдем связь между угловым и тангенциальным ускорениями:
![]() .
.
Изменение
направления скорости при криволинейном
движении характеризуется нормальным
ускорением
![]() :
:
![]() .
.
Таким образом, связь между линейными и угловыми величинами выражается следующими формулами:
![]() .
.
Типы вращательного движения
а)
переменное
–
вращательное движение, при котором
изменяются
![]() и
и
![]() :
:

б) равнопеременное – вращательное движение с постоянным угловым ускорением:
![]()
![]() .
.
в) равномерное – вращательное движение с постоянной угловой скоростью:
![]() .
.
Равномерное
вращательное движение можно характеризовать
периодом
![]() и частотой вращения
и частотой вращения
![]() .
.
Период – это время, за которое тело совершает один полный оборот.
![]() ,
[T]
= c.
,
[T]
= c.
Частота вращения – это число оборотов совершаемых за единицу времени.
![]() ,
[]
= c-1.
,
[]
= c-1.
За
один оборот: ![]() ,
,
![]() ,
, ![]() .
.