

5.2. Основные цели и задачи работы
Целью данной лабораторной работе (ЛР) является освоение методики преобразования ММ ОУ из графической формы описания (структурная схема) в матрично-векторную.
В ходе выполнения ЛР необходимо решить следующие задачи:
- получить навыки разложения динамических звеньев;
- изучить особенности и возможности перехода от графических форм описания динамических систем к МВ ММ;
- получить все матрицы необходимые для записи матрично-векторной формы и сформировать по ней структурную схему.
5.3. Программные средства выполнения работы
Для выполнения данной ЛР рекоментуется использовать специальный программный пакет CLASSIC [4]. Пакет поддерживается демонстрационными файлами, позволяющими рассмотреть отдельные фрагменты выполнения операций и наиболее характерные моменты, связанные с созданием проектов исследуемых объектов, проведением расчетов и т. п. В связи с тем, что CLASSIC имеет многоуровневую систему развитого меню и встроенный редактор помощи HELP, пользование им не составляет какого-либо труда. Для предварительного ознакомления с методикой работы в среде CLASSIC и его возможностями рекомендуется использовать соответствующие методические указания.
5.4. Содержание работы
5.4.1. Преобразовать исходную структурную схему к виду, содержащему звенья только нулевого и первого порядков.
5.4.2. Обозначить переменные состояния
двумя способами. При этом обязательно
необходимо выполнение условия
![]() для обоих случаев, расположение же
остальных переменных может меняться в
произвольном порядке. Составить уравнения
звеньев , входящих в структурную схему.
для обоих случаев, расположение же
остальных переменных может меняться в
произвольном порядке. Составить уравнения
звеньев , входящих в структурную схему.
5.4.3. Преобразовать полученные уравнения к форме Коши, найти необходимые матрицы и перейти к описанию исследуемого объект в пространстве состояний.
5.4.4. Сформировать две структурные схемы на основе полученных систем уравнений, реализовать их в среде пакета CLASSIC по различным каналам и сравнить результаты полученные для двух вариантов друг с другом.
5.4.5. Сформировать проект исходной структурной схемы в среде пакета CLASSIC, получить ее характеристики по тем же каналам, что и в п. 5.4.4.
5.4.6. Сравнить результаты пп. 5.4.4 и 5.4.5, сделать обоснованные выводы о достоверности полученных результатов, о множественности форм представления матрично-векторных математических моделей.
ЛАБОРАТОРНАЯ РАБОТА № 6
"ИССЛЕДОВАНИЕ ЭКВИВАЛЕНТНЫХ ПРЕОБРАЗОВАНИЙ
МАТЕМАТИЧЕСКИХ МОДЕЛЕЙ ДИНАМИЧЕСКИХ
СИСТЕМ В ПРОСТРАНСТВЕ СОСТОЯНИЙ"
6.1. Краткая теория вопроса
6.1.1. Общие закономерности преобразования матрично-векторных математических моделей произвольно выбранного базиса.Допустим, что существует математическая модель эквивалентная форме (5.1), но представленная в виде
|
|
(6.1) |
Это значит, что существует некоторое
преобразование
![]() ,
такое что
,
такое что
|
|
(6.2) |
позволяющее перейти от одного базиса
переменных состояния
![]() к другому. При этом обязательно необходимо,
чтобы матрица
к другому. При этом обязательно необходимо,
чтобы матрица![]() была квадратной и неособенной.
была квадратной и неособенной.
После несложных математических вычислений можно получить выражения для нахождения матриц входящих в систему (6.1) с учетом (6.2)
|
|
(6.3) |

Таким образом, становится ясно, что
форма (6.1) не является единственно
возможной для каждых конкретных А, В, и
т.д. Они просто соответствуют некоторому
конкретному базису в пространстве
состояний. При этом любое невырожденное
преобразование Р в виде квадратной
матрицы размерности
![]() может быть использовано для получения
ММ динамической системы в новом базисе.
Это говорит о том, что любая ДС может
быть описана в бесконечном количестве
различных базисов.
может быть использовано для получения
ММ динамической системы в новом базисе.
Это говорит о том, что любая ДС может
быть описана в бесконечном количестве
различных базисов.
Здесь следует отметить, что пути поиска необходимого преобразования Р могут различаться в зависимости от того, какова исходная предпосылка преобразований.
6.1.2. Основные формы приведения.Для исследования ДС в пространстве состояний используется та или иная форма записи МВ ММ в зависимости от цели исследования. Любую МВ ММ, при определенных условиях, можно привести к необходимому базису, наиболее удобному для анализа свойств объекта. Современная теория управления насчитывает семь основных форм приведения [1, 2].
1) Основная нормальная управляемая форма:
|
Аон= |
(6.4) |
 ;
; ;
Сон=
;
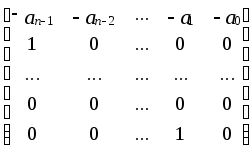
Сон=2) Транспонированная основная нормальная форма (ТОН):
|
Атон= |
(6.5) |
 ;
Втон=
;
Втон= ;
Стон=
;
Стон=3) Дополнительная нормальная форма:
|
Aдоп= |
(6.6) |
 ;
Bдоп=Вон; Cдоп=Сон.
;
Bдоп=Вон; Cдоп=Сон.4) Обратная нормальная форма:
|
Aобр= |
(6.7) |
 ;
Bобр=
;
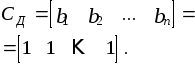
Bобр=5) Каноническая диагональная форма:
|
Aд= |
(6.8) |
 ;
Bд=
;
Bд= ;
;
6) Жорданово-каноническая форма.
7) Треугольная форма.
6.1.3. Нахождение преобразования на основе свойств управляемости объекта.Пусть объект, заданный системой (5.1), полностью управляемый. Тогда ранг матрицы управляемости объекта
|
|
(6.9) |
должен быть равен его размерности n [2].
Поскольку форма (6.1) эквивалентна, то
|
|
(6.10) |
и ее ранг также должен быть равен n.
Если объект (5.1) одномерный, то матрицы (6.9) и (6.10) квадратные и неособенные. Подставив соотношения из системы (6.3) в выражение (6.10), можно получим формулу для нахождения преобразования
|
|
(6.11) |
Поскольку выражение (6.11) получено из факта существования (6.2) и (6.10), то оно является необходимым условием существования Р. Для доказательства достаточности необходимо подставить (6.10) в (6.3). Если при этом равенства превратятся в тождество, то будет доказана достаточность.
Так как аналитически доказать достаточность очень сложно, а чаще всего невозможно, то справедливость (6.11) проверяют непосредственной подстановкой и численным расчетом данной структуры после преобразования Р. Если результат совпадает, то эта форма возможна, если нет, то перейти к заданному базису невозможно.
Если отличие полученной действительной матрицы состоит в одном или двух элементах, величина которых несущественна для выбранного базиса, то можно попытаться изменить структуру в соответствии с полученными результатами и с ними провести проверку, либо при невысоком порядке преобразования системы задать соответствующие элементы и путем указанных преобразований получить аналитические выражения для их конкретного выбора.
6.1.3. Нахождение преобразования на основе свойств наблюдаемости объекта.Пусть система (5.1) обладает свойством полной наблюдаемости, тогда матрица наблюдаемости
|
|
(6.12) |
будет имеет ранг равный n [2].
Матрица (6.12) для одномерной системы является квадратной неособенной. Если система (6.1) эквивалентна исходной, то она также наблюдаема и ее ранг равен N.
|
|
(6.13) |
Подставляя в выражение (6.13) уравнения из системы (6.3), получим преобразование для перехода к требуемому базису
|
|
(6.14) |
Возможности использования выражения (6.14) точно также ограничиваются свойствами его необходимости, достаточность проверяется непосредственной подстановкой.
Для получения некоторых конкретных форм описания необходимая структура матрицы Р может быть найдена по известному алгоритму [1]. Так для получения ТОН формы (6.5) обычно используют матрицу Р вида
|
|
(6.15) |
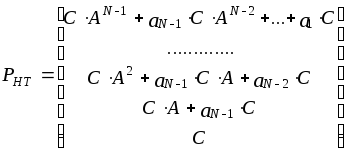 .
.Для построения формы (6.8) строится матрица Вандермонда [1]
|
W= |
(6.16) |
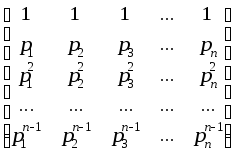 ,
,
где
![]() - собственные числа. Тогда преобразование
находится по формуле
- собственные числа. Тогда преобразование
находится по формуле
|
. |
(6.17) |