

Автоматизация Аржанников Б.А
.pdfФедеральное агентство железнодорожного транспорта Уральский государственный университет путей сообщения Кафедра «Электроснабжение транспорта»
Б. А. Аржанников Л. А. Фролов
Автоматическое регулирование напряжения в системе электроснабжения постоянного тока 3,0 кВ
Курс лекций для студентов специальности 190401 — «Электроснабжение железных дорог» всех форм обучения и слушателей ИДПО
Екатеринбург
2009
УДК 621.311 А80
Аржанников, Б. А.
А80 Автоматическое регулирование напряжения в системе электроснабжения постоянного тока 3,0 кВ: курс лекций / Б. А. Аржанников, Л. А. Фролов. — Екатеринбург: УрГУПС, 2009. — 48 с.
Изложены сведения об управлении производственными процессами, дана классификация систем автоматического управления (регулирования), представлены способы регулирования напряжения трансформаторов под нагрузкой, этапы создания, устройство и режимы работы системы автоматической стабилизации напряжения тяговой подстанции и системы регулирования напряжения в контактной сети.
Пособие соответствует учебной программе дисциплины «Автоматизация систем электроснабжения» и предназначено для студентов специальности 190401 — «Электроснабжение железных дорог» всех форм обучения и слушателей ИДПО.
Авторы: Б. А. Аржанников — доцент кафедры «Электроснабжение транспорта», д-р техн. наук, УрГУПС
Л. А. Фролов — старший преподаватель кафедры «Электроснабжение транспорта», УрГУПС
Рецензенты: А. А. Пышкин — профессор кафедры «Электроснабжение транспорта», канд. техн. наук, УрГУПС
И. Г. Тильк — генеральный директор ЗАО НПЦ «Промэлектроника», канд. техн. наук
© Уральский государственный университет путей сообщения (УрГУПС), 2009
Оглавление |
|
Лекция 1. Автоматическое регулирование напря- |
|
жения в системе электроснабжения постоянного |
|
тока 3,0 кВ ................................................................................ |
4 |
1.1. Классификация систем автоматического управ- |
|
ления (регулирования)............................................................. |
4 |
1.2. Основные требования к напряжению в системе |
|
электрической тяги постоянного тока .................................... |
6 |
1.3. Ступенчатое контактное регулирование напря- |
|
жения трансформаторов под нагрузкой РПН......................... |
8 |
Лекция 2. Тиристорное регулирование напряжения ............ |
12 |
2.1. Ступенчатое тиристорное регулирование напря- |
|
жения трансформаторов .......................................................... |
12 |
2.2. Плавное тиристорное регулирование напряже- |
|
ния трансформаторов .............................................................. |
16 |
Лекция 3. Плавное реакторное регулирование напря- |
|
жения трансформаторов .......................................................... |
19 |
Лекция 4. Система автоматической стабилизации |
|
напряжения тяговой подстанции (АСНТп)............................ |
25 |
Лекция 5. Система автоматического регулирования |
|
напряжения в контактной сети «Сирена»............................... |
29 |
Лекция 6. Регулятор системы автоматической стаби- |
|
лизации напряжения тяговой подстанции на микро- |
|
процессорной базе ................................................................... |
34 |
Библиографический список..................................................... |
38 |
Приложение ............................................................................. |
40 |
3
Лекция 1
Автоматическое регулирование напряжения в системе электроснабжения постоянного тока 3,0 кВ
1.Классификация систем автоматического управления (регулирования)
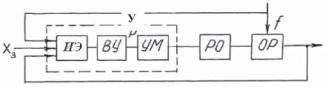
Вобщем виде система автоматического управления (регулирования) САР изображена на рис. 1.1, где введены обозначения объекта регулирования (ОР), исполнительного регулирующего органа (РО), управляющего устройства (регулятора Р), усилителя мощности (УМ), вычислительного устройства (ВУ) и измерительного элемента (ИЭ). Основной регулируемой величиной «У» является, например выпрямленное напряжение полупроводникового
преобразователя Ud. Закон изменения регулируемой величины определяется задающим воздействием Xз (Udз). В зависимости от характера задающего воздействия системы автоматического регу-
лирования подразделяются на три вида: стабилизации (Хз — постоянно), система программного регулирования (Хз изменяется по заранее заданному закону) и следящая система (закон изме-
нения Хз заранее не известен и задается извне). К объекту регулирования может быть приложено одно или несколько возмущающих воздействий «f», стремящихся изменить регулируемую величину «У».
Рис. 1.1. Функциональная схема САР
Чем полнее в системе скомпенсировано влияние возмущающих воздействий, тем точнее воспроизводится задающее воздействие. Однако увеличение количества скомпенсированных возму-
4
щающих воздействий приводит к усложнению системы, поэтому для осуществления компенсации выбирают одно или несколько основных возмущающих воздействий, вызывающих наибольшее отклонение регулируемой величины. Таким возмущением в полупроводниковом преобразователе, в наибольшей мере вызывающим изменение выпрямленного напряжения, является ток нагрузки преобразователя.
При разомкнутой системе автоматического регулирования (САР) выходная величина «У» не измеряется (рис. 1.1). В управляющее устройство (Р) вводятся одно «Хз» или одно «f» либо оба этих сигнала одновременно.
В замкнутой САР на вход управляющего устройства вводятся «Хз» и «У». В такой системе управляющее устройство стремится ликвидировать все отклонения «У» от его значения, определяемого заданием «Хз», независимо от причин, вызывающих эти отклонения, включая любые возмущения, внешние и внутренние помехи, а также изменения параметров схемы. Эти системы могут обеспечить высокую точность регулирования.
Принцип комбинированного регулирования включает принцип регулирования по отклонению (замкнутая САР с введением в регулятор на рис.1.1 регулируемой величины «У» и задающего воздействия «Хз») и принцип регулирования по возмущению (разомкнутая САР с введением в регулятор сигналов возмущения «f»).
Добавление к замкнутой системе разомкнутой системы позволяет облегчить задачу замкнутой САР и тем самым упростить ее и повысить точность регулирования.
Изложенная классификация построена на основе одного классификационного признака — начальной и рабочей информации. Системы классифицируются и по другим признакам.
Процессы в САР делятся на установившиеся и переходные, при рассмотрении которых важное значение имеют следующие требования, предъявляемые к САР: в установившихся процессах — точность регулирования, и в переходных — устойчивость системы и качество процесса регулирования.
Точность регулирования характеризуется погрешностью системы в установившемся режиме по окончании переходного процесса.
Устойчивость — это свойство системы возвращаться в установившееся состояние после того, как она была выведена из этого состояния каким-либо возмущением. Замкнутые САР склонны
5
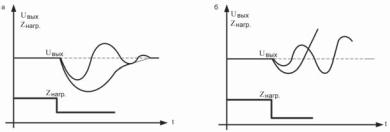
к потере устойчивости, проявляющейся в возникновении расходящегося изменения выходной величины. На рис. 1.2. показаны процессы устойчивого (а) и неустойчивого (б) характера изменения выходной величины в САР.
Рис. 1.2. Возможный характер изменения выходной величины в САР
Качество процесса регулирования характеризуется тем, насколько процесс регулирования близок к желаемому. Количественно качество процесса регулирования определяется критериями качества, например, величиной максимального отклонения выходной величины, вызванного скачком сигнала возмущения, колебательностью переходного процесса, его длительностью.
1.2.Основные требования к напряжению в системе электрической тяги постоянного тока
Всоответствии с ГОСТ 6269-75 номинальным напряжением на шинах подстанций принято 3,3 кВ, максимальным рабочим — 3,85 кВ и по допустимым нормам изоляции — 4 кВ. Максимальные отклонения напряжения на шинах тяговой подстанции при номинальном напряжении питающей сети допустимы в пределах 550 В
(14,3 %). При допустимых отклонениях питающего напряжения энергосистем (ГОСТ 13109-67) в пределах ± 5 % верхний уровень от 3,85 кВ составит 4,04 кВ, а нижний уровень от 3,3 кВ — 3,135 кВ. Таким образом, возможные (нормированные) максимальные отклонения напряжения на шинах подстанций лежат в пределах от 3,135 до 4,04 кВ (18,6 %).
При принятом в проектировании электровозов номинальном напряжении на токоприемнике 3 кВ ГОСТ 6269-75 устанавливает максимальное напряжение 4 кВ и минимальное 2,2 кВ.
6
Дополнительными требованиями для нормальной эксплуатации принят минимальный уровень 2,7 кВ для участков с руководящим подъемом и 2,4 кВ для остальных участков. В результате исследования работы тяговых и вспомогательных машин по условиям ограничения по сцеплению, по току нагрузки, по нагреванию обмоток, ограничения по потенциальным условиям на коллекторе и по коммутации под щетками приняты длительное наибольшее напряжение 3,6 кВ и длительное наименьшее — 2,8 кВ. Этот диапазон напряжений по отношению к регламентированному 2,7–3,85 кВ хотя и уменьшен, но от номинального напряжения на токоприемнике электровоза 3 кВ отличается на +20 % и –6,7 %.
Известно, что напряжение на токоприемнике электровозов, находящихся на фидерной зоне, не может быть постоянным и равным 3 кВ даже при наличии на зоне устройств регулирования напряжения. Поэтому стремление к сужению диапазона отклонения напряжения является условием обеспечения номинального режима тяговых и вспомогательных машин электровоза.
Сужение диапазона отклонения напряжения на токоприемнике электровоза обеспечивается применением на тяговых подстанциях устройств автоматического регулирования напряжения, компенсирующих падение напряжения на внутреннем сопротивлении подстанции при стабилизированных автоматических внешних характеристиках.
Кроме того, введение устройств автоматического регулирования напряжения с высокой точностью позволяет получить практически одинаковые напряжения на шинах соседних тяговых подстанций, что ведет к существенному снижению «уравнительных токов» (токов перераспределения) при наличии тяговой нагрузки на фидерной зоне.
При одинаковых скоростях движения и массе поездов без регулирования и с регулированием напряжения расход электрической энергии на тягу практически не изменяется и равен
Aтяги = UэIэtт,
где Uэ, Iэ — напряжения и ток электровоза, tт — время движения под током.
При повышении напряжения и равенстве времени движения под током снижается ток электровоза, что ведет к уменьшению потерь электрической энергии в тяговой сети.
7
1.3.Ступенчатое контактное регулирование напряжения трансформаторов под нагрузкой РПН
Известные в настоящее время способы регулирования напряжения трансформаторов можно разделить на три основные группы: ступенчатое регулирование напряжения под нагрузкой РПН (контактное и бесконтактное); плавное, бесконтактное РПН; плавно-ступенчатое РПН.
Вторичное напряжение U2 трансформатора изменяется при значительных отклонениях первичного напряжения U1 и изменении тока нагрузки от нуля до номинальной величины.
В условиях эксплуатации возникает необходимость поддерживать вторичное напряжение трансформатора постоянным или изменяющимся по определенному закону. Известно, что ЭДС обмотки равна произведению ЭДС одного витка ℓw на число витков w.
При постоянном для данного трансформатора значении ℓw на практике получило регулирование напряжения изменением ступенями числа витков первичной или вторичной обмоток. У силовых (головных) понизительных трансформаторов, работающих при значительных отклонениях первичного напряжения U1, ответвления делают у первичной обмотки с целью поддержания постоянным отношения U1/w1.
Регулировочные ответвления располагают в средней части обмотки или в конце.
При переключении ответвлений обмотки под нагрузкой недопустим разрыв цепи тока трансформатора.
Схема переключения под нагрузкой с применением токоограничивающего реактора LR показана на рис. 1.3.
Переход с одного ответвления (х1) на соседнее (х2) осуществляется в порядке позиций 1–2–3–4–5–6–7. Перед размыканием контактов переключателей SAC1 и SAC2 производят отключение их от питающей сети или от нагрузки выключателями КМ1 и КМ2. В промежуточной позиции (4) циркулирующий ток Iц ограничен сопротивлением реактора LR. В крайних позициях (1 и 7) индуктивное сопротивление реактора близко к нулю, так как рабочий ток, протекая по параллельным цепям реактора в противоположных направлениях, не создает магнитного потока в магнитопроводе реактора LR.
8
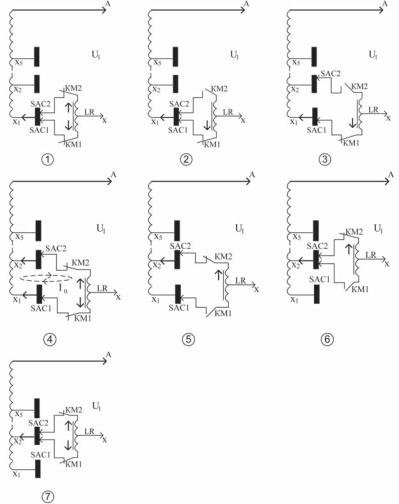
Рис. 1.3. Схема ступенчатого регулирования напряжения трансформатора под нагрузкой с токоограничивающим реактором
При переключении с ответвления х1 до х5 (рис. 1.3), т. е. с уменьшением числа витков w1 первичной обмотки напряжение холостого хода вторичной обмотки U20 увеличивается
9
U |
20 |
= |
U10 |
= |
U10 |
w , |
|
|
|||||
|
|
K т |
2 |
|||
|
|
|
|
w1 |
||
где w2 — число витков вторичной обмотки.
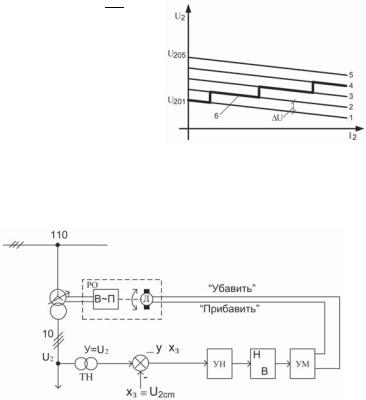
Внешние характеристики трансформатора с РПН осуществляемого по схеме рис. 1.3. представлены на рис 1.4.
Для принятой ступени ре-
U |
|
гулирования U = 2,510010 на- |
|
пряжение U2 изменяется от- |
|
носительно заданного стаби- |
|
лизированного напряжения |
|
на уровне напряжения U20 |
|
в пределах ±1,25 %. |
|
На рис. 1.5 представлена |
|
схема замкнутой системы ав- |
|
томатического ступенчатого |
|
контактного регулирования |
Рис. 1.4. Внешние характеристики |
напряжения трансформато- |
трансформатора: |
ра в соответствии с функцио- |
1, 2, 3, 4, 5 — естественные; |
нальной схемой рис. 1.1. |
6 — автоматическая |
Рис. 1.5. Функциональная схема ступенчатого контактного АРПН трансформатора:
ТН — измерительный трансформатор напряжения, В-П — контактные выключатель и переключатель, УН — усилитель напряжения, В — реле времени, УМ — усилитель мощности
10