

Изучение сложения колебаний
Цель работы: изучить сложение взаимно перпендикулярных колебаний с помощью осциллографа, познакомиться с устройством осциллографа.
Оборудование: электронный осциллограф, два звуковых генератора.
Теоретическое введение
Колебания – это процесс движения, при котором параметры движения тела (координата, скорость, ускорение, сила, энергия и т.д.) периодически повторяются. Колебания называются гармоническими, если смещение в зависимости от времени происходят по уравнению синуса или косинуса, например x = A cos( t + ). Здесь А – амплитуда колебаний, то есть наибольшее смещение тела от положения равновесия, – циклическая частота, равная числу колебаний за время 2 секунд. Время одного полного колебания Т = 2π/ω называется периодом колебаний. Аргумент косинуса называется фазой, – начальная фаза.
Пусть тело участвует одновременно в двух взаимно перпендикулярных колебаниях, происходящих по уравнениям:
x = A1 cos (1t + 1), y = A2 cos (2t + 2). (1)
В общем случае траектория будет незамкнутой кривой, заполняющей прямоугольник со сторонами 2А1 – 2А2. . Лишь в том случае, когда отношение частот равно отношению целых чисел, траектория движения замыкается и периодически повторяется. Такие траектории называются фигурами Лиссажу.
Пример
1.
Пусть частоты
колебаний равны, 1
= 2,
и разность фаз равна нулю:
x
= A1
cos
(
t)
, y
= A2
cos
(
t).
Чтобы найти уравнение траектории, то
есть зависимость y(x),
следует из уравнений исключить параметр
– время t.
Для этого достаточно поделить уравнения.
В результате получим
![]() .
.
Это уравнение прямой линии, проходящей через начало координат из первого во второй квадрант (рис. 1, Δφ = 0). Если разность фаз равна радиан, то знак, например для координаты y, меняется и траектория колебаний проходит из второго в четвертый квадрант.
Пример
2. Пусть
частоты колебаний равны, а разность фаз
равна
/2. Уравнения
(2) примут вид:
x
= A1
cos(
t),
y
= A2
sin
(
t).
Чтобы
исключить время t,
воспользуемся теоремой: сумма квадратов
синуса и косинуса равна единице. Подставив
функции синуса и косинуса, получим
![]() .
.
Э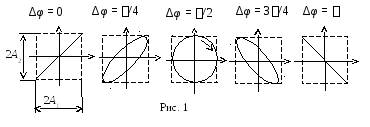 то
уравнение эллипса с полуосямиА1
и А2.
Движение по траектории начинается с
точки А1
и происходит
по часовой стрелке (рис. 1, Δφ
= π/2). Если
амплитуды складываемых колебаний равны,
то траектория будет окружностью радиуса,
равного амплитудам.
то
уравнение эллипса с полуосямиА1
и А2.
Движение по траектории начинается с
точки А1
и происходит
по часовой стрелке (рис. 1, Δφ
= π/2). Если
амплитуды складываемых колебаний равны,
то траектория будет окружностью радиуса,
равного амплитудам.
Как видно из примеров 1 и 2, при равных частотах траектория зависит от разности фаз складываемых колебаний.
Пример
3.
Пусть частоты колебаний о тличаются
в два раза,2
/1
= 2, начальные
фазы равны нулю:
тличаются
в два раза,2
/1
= 2, начальные
фазы равны нулю:
x
= A1
cos
t, y = A2
cos
2
t. Исключим
время.
Подставив
функции косинусов в формулу cos2
t
= 2cos2
t
– 1, получим
![]() .
Это уравнение параболы, вершина которой
смещена по осиОy
на – А2
(рис.2).
.
Это уравнение параболы, вершина которой
смещена по осиОy
на – А2
(рис.2).
В данной работе изучение сложения взаимно перпендикулярных колебаний производится с помощью осциллографа. Если на вертикальный и горизонтальный вход осциллографа подать колебания кратных частот, то на экране можно наблюдать фигуры Лиссажу.
О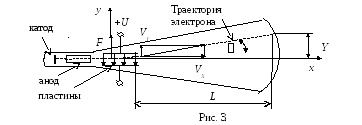 сциллограф
– это прибор для наблюдения быстро
протекающих процессов, для измерения
напряжения, частоты. Основным элементом
осциллографа является электронно-лучевая
трубка. Электроны, вылетающие из катода,
ускоряются и фокусируются между анодом
и катодом в узкий луч, который на
люминесцентном экране создает светящую
точку. Управление лучом производится
с помощью электрического поля отклоняющих
пластин (рис.3).
сциллограф
– это прибор для наблюдения быстро
протекающих процессов, для измерения
напряжения, частоты. Основным элементом
осциллографа является электронно-лучевая
трубка. Электроны, вылетающие из катода,
ускоряются и фокусируются между анодом
и катодом в узкий луч, который на
люминесцентном экране создает светящую
точку. Управление лучом производится
с помощью электрического поля отклоняющих
пластин (рис.3).
Когда
электрон со скоростью V0
влетает в электрическое поле вдоль
пластин, то на него действует электрическая
сила, перпендикулярная скорости. Она
равна произведению заряда на напряженность:
F=
е Е. Электрон
приобретает ускорение, а
= еЕ/m
и скорость VY
= а t.
Напряженность электрического поля
связана с напряжением соотношением Е
= U/d.
Горизонтальная
компонента скорости постоянна Vx=
V0,
и время движения электрона в поле между
пластинами длиной l
равно t
= l
/V0.
Подставив время и ускорение в формулу
для компоненты скорости VY,
получим VY
=
![]() .
Если пренебречь поперечным смещением
луча между пластинами, то, двигаясь
далее прямолинейно, он отклонится при
попадании на экран Y
= L
tg
.
Тангенс угла отклонения равен отношению
компонент скорости:
.
Если пренебречь поперечным смещением
луча между пластинами, то, двигаясь
далее прямолинейно, он отклонится при
попадании на экран Y
= L
tg
.
Тангенс угла отклонения равен отношению
компонент скорости:
![]() .
Подставив формулы компонент скорости,
получим, что смещение луча пропорционально
напряжению:
.
Подставив формулы компонент скорости,
получим, что смещение луча пропорционально
напряжению:
![]() .
(2)
.
(2)
ВЫПОЛНЕНИЕ РАБОТЫ
1. Проверить подсоединение генераторов на вертикальный и горизонтальный входы осциллографа. Включить в сеть 220 В генераторы и осциллограф. Отключить развертку осциллографа по оси X.
|
1 : 2 |
Разность фаз | ||
|
0 |
/2 |
| |
|
1:1 |
|
|
|
|
1:2 |
|
|
|
|
1:3 |
|
|
|
3. Плавно изменяя частоту одного из генераторов в небольших пределах, добиться получения фигуры Лиссажу. Так как частота и фаза сигнала генераторов «плывет», то изображение фигуры меняется. Зарисовать фигуры Лиссажу в таблицу.
4. Повторить обнаружение фигур Лиссажу при другом соотношении частот: 1:2, 1:3…
Выключить приборы.
5. Сделать выводы.
КОНТРОЛЬНЫЕ ВОПРОСЫ
1. Запишите уравнение гармонических колебаний. Дайте определение параметрам движения.
2. Дайте определение фигур Лиссажу, условия их образования.
3. Выведите уравнение траектории при сложении колебаний одинаковой частоты с разностью фаз 0 и π/2.
4. Выведите уравнение траектории при сложении колебаний, частоты которых отличаются в 2 раза.
5. Объясните принцип работы осциллографа.
6. Докажите, что смещения электронного луча на экране пропорционально напряжению на входе Y осциллографа.
Работа 13
ОПРЕДЕЛЕНИЕ МОМЕНТА ИНЕРЦИИ
ФИЗИЧЕСКОГО МАЯТНИКА
Цель работы: определить момент инерции физического маятника в виде стержня с грузами по периоду собственных колебаний.
Оборудование: маятник, секундомер.
ТЕОРЕТИЧЕСКОЕ ВВЕДЕНИЕ
Момент инерции твердого тела – это мера инертности тела при его вращательном движении. В этом смысле он является аналогом массы тела, которая является мерой инертности тела при поступательном движении. Согласно определению, момент инерции тела равен сумме произведений масс частиц тела mi на квадраты их расстояний до оси вращения ri 2:
![]() ,
или
,
или
![]() .
(1)
.
(1)
Момент инерции зависит не только от массы, но и от ее распределения относительно оси вращения. Как видно, инертность при вращении тела тем больше, чем дальше от оси расположены частицы тела.
Существуют различные экспериментальные методы определения момента инерции тел. В работе предлагается метод определения момента инерции по периоду собственных колебаний исследуемого тела как физического маятника. Физический маятник – это тело произвольной формы, точка подвеса которого расположена выше центра тяжести. Если в поле тяжести маятник отклонить от положения равновесия и отпустить, то под действием силы тяжести маятник стремится к положению равновесия, но, достигнув его, по инерции продолжает движение и отклоняется в противоположную сторону. Затем процесс движения повторяется в обратном направлении. В итоге маятник будет совершать вращательные собственные колебания.
Для вывода формулы периода собственных колебаний применим основной закон динамики вращательного движения. Угловое ускорение тела прямо пропорционально моменту силы и обратно пропорционально моменту инерции тела относительно оси вращения:
=
![]() .
(2)
.
(2)
М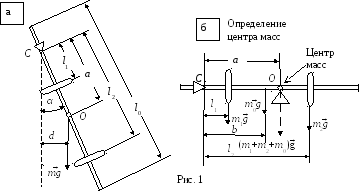 омент
силы по
определению равен произведению силы
на плечо силы. Плечо силы – это
перпендикуляр, опущенный из оси вращения
на линию действия силы. Для маятника
(рис. 1а) плечо силы тяжести равно d
= а sin
,
где а
– расстояние между осью вращения и
центром тяжести маятника. При
малых колебаниях маятника угол отклонения
сравнительно мал, а синусы малых углов
с достаточной точностью равны самим
углам. Тогда момент силы тяжести можно
определить по формуле
М=−mgа∙.
Знак минус
обусловлен тем, что момент силы тяжести
противодействует отклонению маятника.
омент
силы по
определению равен произведению силы
на плечо силы. Плечо силы – это
перпендикуляр, опущенный из оси вращения
на линию действия силы. Для маятника
(рис. 1а) плечо силы тяжести равно d
= а sin
,
где а
– расстояние между осью вращения и
центром тяжести маятника. При
малых колебаниях маятника угол отклонения
сравнительно мал, а синусы малых углов
с достаточной точностью равны самим
углам. Тогда момент силы тяжести можно
определить по формуле
М=−mgа∙.
Знак минус
обусловлен тем, что момент силы тяжести
противодействует отклонению маятника.
Так как угловое ускорение – это вторая производная от угла поворота по времени, то основной закон динамики вращательного движения (1) принимает вид
![]() .
(3)
.
(3)
Это дифференциальное уравнение второго порядка. Его решением должна быть функция, превращающая уравнение в тождество. Такой функцией может быть функция синуса
= 0 sin ( t + ). (4)
При
этом циклическая частота равна
![]() .
Циклическая частота связана с периодом
колебаний, то есть временем одного
колебания, соотношениемT
= 2
/.
Отсюда
.
Циклическая частота связана с периодом
колебаний, то есть временем одного
колебания, соотношениемT
= 2
/.
Отсюда
![]() .
(5)
.
(5)
Период колебаний Т и расстояние от оси вращения до центра тяжести маятника а измерить можно. Тогда из (5) момент инерции маятника относительно оси вращения С может быть определен экспериментально по формуле
![]() .
(6)
.
(6)
Маятник,
момент инерции которого определяется
в работе, представляет собой стержень
с надетыми на него двумя дисками.
Теоретически момент инерции маятника
можно определить как сумму моментов
инерции отдельных частей. Момент инерции
дисков можно рассчитать по формуле
момента инерции материальной точки,
так как они невелики по сравнению с
расстоянием до оси вращения:
![]() ,
,
![]() .Момент
инерции стержня относительно оси,
находящейся на расстоянии b
от середины стержня, можно определить
по теореме Штейнера
.Момент
инерции стержня относительно оси,
находящейся на расстоянии b
от середины стержня, можно определить
по теореме Штейнера
![]() .
В итоге суммарный момент инерции маятника
можно рассчитать по формуле
.
В итоге суммарный момент инерции маятника
можно рассчитать по формуле
![]() .
(7)
.
(7)
Здесь m1, m2 и m0 – массы первого, второго дисков и стержня, l1, l2 – расстояния от середин дисков до оси вращения, l0 – длина стержня.
Расстояние от точки подвеса до центра тяжести маятника а, необходимое для определения момента инерции в формуле (6), можно определить экспериментально, используя понятие центра тяжести. Центр тяжести тела – это точка, к которой приложена равнодействующая сила тяжести. Поэтому если маятник положить горизонтально на опорную призму, расположенную под центром тяжести, то маятник будет в равновесии. Затем достаточно измерить расстояние от оси С до опорной призмы.
Но можно определить расстояние а расчетом. Из условия равновесия маятника на призме (рис. 1б) следует, что момент результирующей силы тяжести относительно оси С равен сумме моментов сил тяжести грузов и стержня: (m1 +m2 + m0)gа = m1gl1 + m2gl2 + m0gb. Откуда получим
![]()
![]() .
(8)
.
(8)
ВЫПОЛНЕНИЕ РАБОТЫ
1. Взвешиванием на весах определить массы дисков и стержня. Расположить на стержне и закрепить диски. Измерить расстояния от оси вращения до середин дисков l1, l2 и до середины стержня b, длину стержня l0 по сантиметровым делениям на стержне. Результаты измерений записать в табл. 1.
Включить установку в сеть 220 В, нажать кнопку «Сеть».
Таблица 1
|
Масса 1годискаm1, кг |
|
|
Масса 2годискаm2, кг |
|
|
Масса стержня m0, кг |
|
|
Расстояние l1, см |
|
|
Расстояние l2, см |
|
|
Длина стержня l0, см |
|
|
Расстояние до оси b, см |
|
Выключить установку.
3. Произвести расчеты в системе СИ. Определить среднее значение <Т> периода колебаний. Определить расстояние а от оси до центра тяжести маятника по формуле (8), или положить маятник на опорную призму так, чтобы он находился в равновесии, и по делениям на стержне измерить расстояние а.
4. Определить экспериментальное среднее значение момента инерции маятника <Jэкс> по формуле (6) по среднему значению периода колебаний <T>.
Таблица 2
|
а, м |
Т1, с |
Т2, с |
Т3, с |
<T>,с |
<Jэксп>,кг∙м2 |
Jтеор, кг∙м2 |
|
|
|
|
|
|
|
|
5. Определить теоретическое значение момента инерции маятника Jтеор по формуле (7).
6. Сделать вывод, сравнив теоретическое и экспериментальное значения момента инерции маятника. Оценить погрешность измерения J =<J эксп> – J теор.
7. Записать ответ в виде: Jэксп = < J > J .
КОНТРОЛЬНЫЕ ВОПРОСЫ
1. Дайте определение физического маятника, объясните, почему возможны собственные колебания маятника.
2. Запишите основной закон динамики вращательного движения для физического маятника.
3. В каком виде ищут функцию, являющуюся решением дифференциального уравнения динамики для физического маятника. Проверьте, будет ли эта функция решением.
4. Запишите формулу для периода колебаний физического маятника. Как изменится период колебаний, если нижний диск сместить еще ниже?
5. Дайте определение момента инерции. Выведите формулу для определения теоретического значения момента инерции маятника.
6. Дайте определение центра тяжести. Выведите формулу для расчета положения центра масс. Как экспериментально можно определить положение центра масс маятника?
Работа 14