

1. Структурный анализ механизма
Кинематическому анализу механизма обычно предшествует структурный анализ, который состоит в определении степени подвижности и структурных групп.
Степень подвижности показывает потребное количество задаваемых законов движения и число начальных звеньев. При ее определении выявляются звенья, устанавливаются их названия, число и класс кинематических пар, а также пассивные связи, если такие имеются.
Рычажные механизмы расчленяются на структурные группы — группы Ассура, и начальные звенья. Класс, порядок и вид структурных групп определяют методы и последовательность кинематического и силового анализа.
Степень подвижности плоских механизмов определяется по формуле Чебышева П. Л., которая для рычажных механизмов имеет вид:
W=3n-2p5 = 3·5-2·7 = 1,
где п - число подвижных звеньев; p5 - число кинематических пар пятого класса.
К начальному звену 1 и стойке 0 последовательно присоединены две группы Ассура: (3,4) – второго класса, второго порядка, первого вида и (5,6) – второго класса, второго порядка, второго вида, значит, данный механизм относится ко второму классу. Порядок кинематического исследования механизма определяется формулой его строения: I (0,1)→ II (2,3) → II (4,5). План механизма построен в масштабе:
Рис 1. Группы Ассура
1.2. Построение 12 планов механизма.
В
соответствии с заданием
основные
звенья механизма имеют следующие
параметры:
![]() ,
,![]()
![]() ,
,
![]() .
.
Построение
плана положений звеньев механизма
производится методом засечек. За
начальное (нулевое) положение механизма
понимается такое, при котором ведомое
звено находится в одном из крайних
положений. В этом положении скорость
ведомого звена равна нулю. Для построения
других положений механизма берется 12
положений механизма, соответствующих
углам поворота через 30о.
Положения кривошипа обозначаются
порядковым номером, начиная с нулевого,
в направлении угловой скорости
![]() 2.
2.
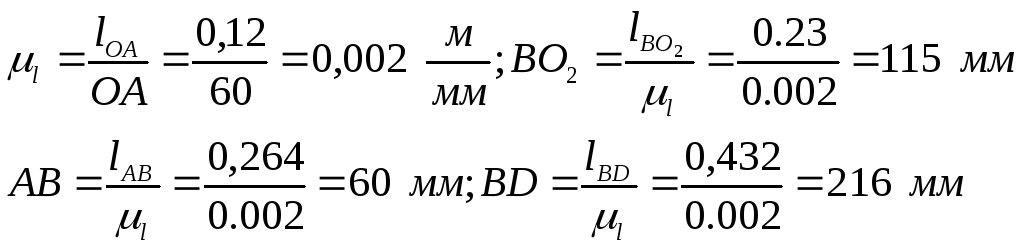
Планы механизма строятся в масштабе, который определяется как отношение реальной длины кривошипа в метрах (м) к длине его отрезка на
чертеже
в миллиметрах (мм):
1.3. Планы скоростей.
Планами скоростей и ускорений механизма называется векторное изображение этих кинематических параметров для соответствующего положения механизма.
Метод планов основан на теореме о разложении движения, согласно которой сложное движение любого звена можно разложить на переносное – поступательное и относительное – вращательное.
Угловая скорость кривошипа равна: ω2 =13 (1/с).
У кривошипа определяем скорость точки А:
![]() (
(![]() ).
).
Эту скорость изобразим отрезком pа=50 мм (p – полюс плана скоростей).
Определяем масштабный коэффициент скоростей:
![]()
Вектор
![]() откладываем перпендикулярно к кривошипу
в данном положении и направляем в
сторону его вращения.
откладываем перпендикулярно к кривошипу
в данном положении и направляем в
сторону его вращения.
Рисунок2. -План скоростей
![]()
![]()
![]()
![]() находим,
используя свойство подобия
находим,
используя свойство подобия
Используя план скоростей, получаем следующие значения абсолютных и относительных скоростей точек для второго положения:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
 Определяем
угловые скорости ω3
,
ω4,
ω5,
звеньев
3, 4 и 5:
Определяем
угловые скорости ω3
,
ω4,
ω5,
звеньев
3, 4 и 5:
![]()
![]()
![]()
Таблица 1- Расчетные данные и численные значения скоростей
|
Поло-жение меха-низма |
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
|
bd, мм |
0 |
12 |
19 |
23 |
18 |
3 |
18 |
27 |
7 |
33 |
55 |
21 |
|
pb, мм |
0 |
15 |
26 |
38 |
48 |
55 |
57 |
47 |
13 |
184 |
87 |
26 |
|
аb, мм |
50 |
53 |
52 |
40 |
31 |
21 |
12 |
4 |
63 |
194 |
45 |
29 |
|
pd, мм |
0 |
5 |
12 |
22 |
37 |
53 |
64 |
52 |
13 |
199 |
47 |
9 |
|
рs3, мм |
26 |
24 |
30 |
39 |
47 |
52 |
53 |
48 |
20 |
102 |
67 |
36 |
|
ps4, мм |
0 |
7,5 |
13 |
19 |
24 |
27,5 |
28,5 |
28,5 |
6,5 |
92 |
43,5 |
13 |
|
ps5, мм |
0 |
8,5 |
17 |
27 |
41 |
54 |
60 |
47,5 |
12 |
191 |
65 |
15,5 |
|
|
1,56 | |||||||||||
|
|
0 |
0,36 |
0,57 |
0,69 |
0,54 |
0,09 |
0,54 |
0,81 |
0,21 |
0,99 |
1,65 |
0,63 |
|
|
0 |
0,45 |
0,78 |
1,14 |
1,44 |
1,65 |
1,71 |
1,41 |
0,39 |
5,52 |
2,61 |
0,78 |
|
|
1,5 |
1,59 |
1,56 |
1,2 |
0,93 |
0,63 |
0,36 |
0,12 |
1,89 |
5,82 |
1,35 |
0,87 |
|
|
0 |
0,15 |
0,36 |
0,66 |
1,11 |
1,59 |
1,92 |
1,56 |
0,39 |
5,97 |
1,41 |
0,27 |
|
|
0,78 |
0,72 |
0,9 |
1,17 |
1,41 |
1,56 |
1,59 |
1,44 |
0,6 |
3,06 |
2,01 |
1,08 |
|
|
0 |
0,225 |
0,39 |
0,57 |
0,72 |
0,825 |
0,855 |
0,855 |
0,195 |
2,76 |
1,305 |
0,39 |
|
|
0 |
0,255 |
0,48 |
0,81 |
1,23 |
1,62 |
1,8 |
1,425 |
0,36 |
5,73 |
1,95 |
0,465 |
|
|
0 |
0,15 |
0,36 |
0,66 |
1,11 |
1,59 |
1,92 |
1,56 |
0,39 |
5,97 |
1,41 |
0,27 |
|
ω3, 1/с |
5,68 |
6,02 |
5,9 |
4,54 |
3,52 |
2,39 |
1,36 |
0,45 |
7,16 |
22,04 |
5,11 |
3,3 |
|
ω 4, 1/с |
0 |
1,96 |
3,39 |
4,96 |
6,26 |
7,17 |
7,43 |
6,13 |
1,7 |
24 |
11,35 |
3,39 |
|
ω 5, 1/с |
0 |
0,83 |
1,32 |
1,6 |
1,25 |
0,21 |
1,25 |
1,875 |
0,48 |
2,29 |
3,82 |
1,46 |
|
pa, мм |
50 | |||||||||||
|
ω2, 1/с |
13 | |||||||||||