

2.1.2. Выбор оптимальной номинальной мощности двигателя
Общая характеристика и производственная информация
Очень часто номинальная мощность электродвигателя является избыточной с точки зрения нагрузки – двигатели редко эксплуатируются при полной нагрузке. По данным исследований, проводившихся на предприятиях стран ЕС, в среднем двигатели эксплуатируются при нагрузке, составляющей 60 % номинальной. Согласно [4] электродвигатели достигают максимального КПД при нагрузке от 60 до 100 % номинальной, рис. 2.3. По данным [20] (США) связь КПД и нагрузки у двигателей существенно иная, см. рис. 6.1.

Рис. 2.3. Зависимость КПД электродвигателя от его нагрузки
Индукционные двигатели достигают максимального КПД при нагрузке около 75 % номинальной, и величина КПД остается практически неизменной при снижении нагрузке до 50 % номинала. При нагрузке ниже, чем 40 % номинальной, условия работы двигателя существенно отличаются от оптимальных, и КПД снижается очень быстро. У двигателей высокой мощности порог, ниже которого происходит резкое снижение КПД, составляет около 30 % номинальной нагрузки.
Использование двигателей с оптимальной номинальной мощностью:
способствует повышению энергоэффективности, позволяя эксплуатировать двигатели при максимальном КПД;
может способствовать снижению потерь в сетях, связанных с низким коэффициентом мощности;
может способствовать некоторому снижению частоты вращения вентиляторов и насосов и, как следствие, энергопотреблению этих устройств.
2.1.3. Приводы с переменной скоростью
Общая характеристика и производственная информация
Использование приводов с переменной скоростью, представляющих собой сочетание электродвигателя с регулирующим устройством, способно привести к значительному энергосбережению, связанному с более эффективным управлением характеристиками технологического процесса. Другие положительные эффекты применения таких устройств включают, в частности, уменьшение износа механического оборудования и снижение уровня шума. При работе в условиях переменной нагрузки приводы с переменной скоростью позволяют существенно снизить уровень энергопотребления. В частности, для таких применений, как центробежные насосы, компрессоры и вентиляторы, сокращение энергопотребления, может находиться в диапазоне 4–50 %. Использование приводов с переменной скоростью способствует сокращению уровня энергопотребления и повышению общей производительности таких устройств по обработке материалов, как центрифуги, мельницы и различные станки, а также таких устройств по перемещению материалов, как накаты (лентопротяжные механизмы), конвейеры и подъемники.
Прочие возможные положительные эффекты использования приводов с переменной скоростью включают:
расширение диапазона возможных режимов эксплуатации исполнительного устройства;
изоляцию двигателей от сетей, что может способствовать более стабильному режиму работы двигателей и повышению КПД;
возможность точной синхронизации нескольких двигателей;
повышение скорости и надежности реагирования на изменение рабочих условий.
Приводы с переменной скоростью не являются оптимальным решением для любых условий. В частности, их применение не является оправданным в условиях постоянной нагрузки (например, для дутьевых вентиляторов печей кипящего слоя, компрессоров окислительного воздуха и т.д.), поскольку потери в регулирующем устройстве составляют 3–4% потребляемой энергии (преобразование частоты, корректировка фазы).
Отечественный опыт [1]
В отечественной практике, как правило, мероприятия, обеспечивающие экономию электроэнергии в электродвигателях при различных загрузках, сводятся частотному преобразованию (регулированию) напряжения.
Применение регулятора напряжения позволяет уменьшить потери двигателя при изменении нагрузки. При снижении напряжения с помощью регулятора уменьшаются потери общей потребляемой мощности, так как регулятор имеет малые потери. Простейшим способом регулирования напряжения на обмотках двигателя является переключение его схемы питания при присоединении к сети с «треугольника» на «звезду». При таком переключении напряжение скачком изменяется в 1,73 раза.
Производительность электродвигателя зависит от частоты вращения приводного вала, которая может регулироваться частотой питающего напряжения.
В настоящее время частота питающего напряжения может меняться специальным преобразователем частоты от стандартного для сети значения 50 Гц в довольно широких пределах (от единиц до сотен герц).
На рис. 2.4 показана схема частотно-регулирующего преобразователя (ЧРП), в который входят: выпрямитель; звено постоянного тока с LС-филь-тром; автономный инвертор напряжения с широтно-импульсной модуляцией (ШИМ). Регулировка напряжения при питании асинхронного двигателя осуществляется изменением длительности импульсов напряжения, подаваемого потребителю. Изменением длительности импульсов на выходе инвертора последовательно формируется напряжение требуемой частоты. При этом частота может задаваться, например, в соответствии с необходимым расходом, давлением перемещаемого вещества, скоростью подачи материала, которые должны быть обеспечены при работе электропривода.
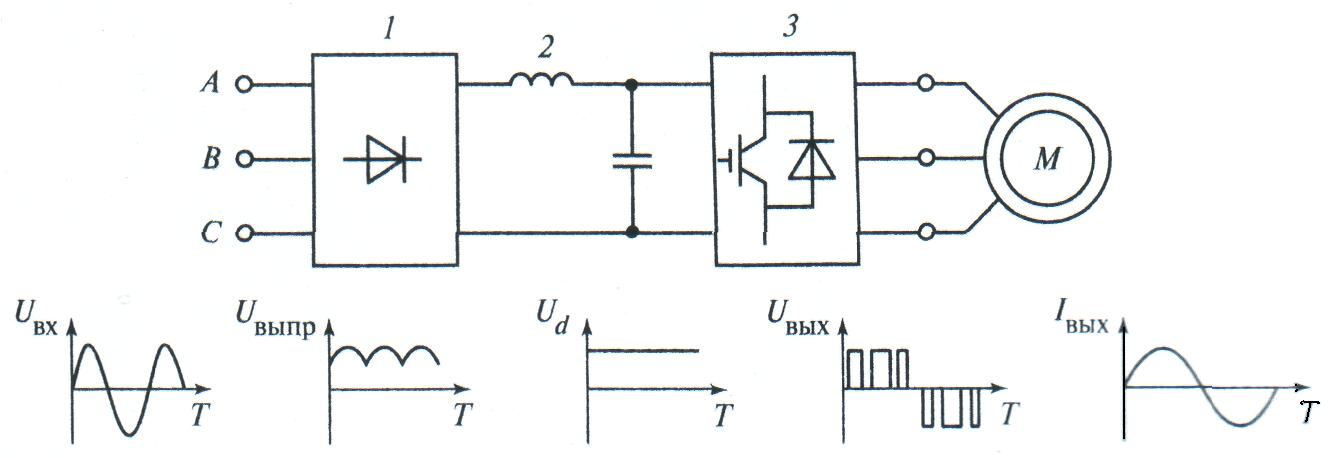
Рис. 2.4. Схема частотно-регулирующего преобразователя:
1 — выпрямитель; 2 — звено постоянного тока с LС-фильтром; 3 — автономный инвертор напряжения с широтно-импульсной модуляцией; М — потребитель (двигатель)
Наибольший экономический эффект от использования преобразователей частоты дает применение частотного регулирования на объектах, обеспечивающих подачу газов и жидкостей при изменении их потребления. Эффективность применения частотного регулирования по сравнению с дросселированием показана на рис. 2.5.
При дросселировании расход Q жидкости или газа снижается за счет уменьшения проходного сечения трубопровода, перекрываемого регулирующей арматурой. В этом случае энергия потока, сдерживаемого задвижкой или клапаном, теряется, не совершая полезной работы. Применение преобразователя частоты в составе насосного агрегата или вентилятора позволяет задать необходимое давление или расход, что обеспечивает не только экономию электроэнергии, но и снижение потерь подаваемого вещества вследствие уменьшения его утечек, связанных с повышением давления.

Рис. 2.5. Потребление мощности при различных способах регулирования
частоты вращения вала насосов:
1 — мощность, потребляемая при дросселировании; 2 — мощность, потребляемая при частотном регулировании; 3 — экономия потребляемой мощности
При использовании частотно-регулирующего преобразователя достигаются и другие технические преимущества: обеспечивается плавный разгон и торможение двигателя, ограничивается ток пуска на уровне номинального в рабочих и аварийных режимах, достигается увеличение срока службы механической и электрической частей оборудования, высвобождается часть коммутационного оборудования и автоматических устройств. Преобразователи обеспечивают защиту двигателя и самого преобразователя от короткого замыкания, обрыва и перекоса фаз на выходе, перегрева инвертора, недопустимого отклонения напряжения в сети.
В табл. 2.1 приведены характеристики применяемых в настоящее время автоматических регуляторов приводов переменного тока.
Таблица 2.1
Характеристики автоматических регуляторов приводов переменного тока «Универсал»
|
Номинальная мощность на валу, кВт |
Число фаз и напряжение на входе, В |
Частота тока сети, Гц |
Коэффициент мощности на входе, не менее |
КПД |
Число фаз и напряжение на выходе, В |
Частота на выходе, Гц |
Масса, кг, не более |
|
0,55—0,75 |
1x220 [3x380] |
50,6 |
0,8 (0,9) |
0,95 (0,96) |
3х(0—220) [3х(0—380)] |
0,5—1600 |
4 |
|
1,1—1,5 |
1x220 [3x380] |
50,6 |
0,8 (0,9) |
0,95 (0,96) |
3х(0— 380) |
0,5—1600 |
5 |
|
1,5—2,2 |
3x380 |
50,6 |
0,9 |
0,97 |
3х(0—380) |
0,5—1600 |
5 |
|
3,0—3,7 |
3x380 |
50,6 |
0,9 |
0,97 |
3х(0—380) |
0,5—1600 |
8 |
|
5,5—7,5 |
3x380 |
50,6 |
0,9 |
0,97 |
3х(0—380) |
0,5—1600 |
15 |
|
11—15 |
3x380 |
50,6 |
0,9 |
0,97 |
3х(0—380) |
0,5—1600 |
22 |
|
18,5—22 |
3x380 |
50,6 |
0,9 |
0,97 |
3х(0—380) |
0,5—1600 |
30 |
|
11—15 |
3x380 |
50,6 |
0,9 |
0,97 |
3х(0—380) |
0,5—400 |
22 |
|
18,5—22 |
3x380 |
50,6 |
0,9 |
0,97 |
3х(0—380) |
0,5—400 |
30 |
|
30 |
3x380 |
50,6 |
0,9 |
0,97 |
3х(0—380) |
0,5—400 |
40 |
|
37 |
3x380 |
50,6 |
0,9 |
0,97 |
3х(0—380) |
0,5—400 |
50 |
|
45 |
3x380 |
50,6 |
0,9 |
0,97 |
3х(0—380) |
0,5—400 |
61 |
|
55 |
3x380 |
50,6 |
0,9 |
0,97 |
3х(0—380) |
0,5—400 |
75 |
Примечание. Напряжение на входе может изменяться в пределах 15 %.
Преимущества применения частотно-регулируемого привода заключаются в том, что обеспечивается энергосбережение благодаря соответствию расхода и полезного потребления электроэнергии, сохраняется высокая надежность работы электропривода (наработка на отказ может достигать 25000 ч), открываются широкие возможности интеграции привода в системы автоматизированного управления (АСУ ТП), снижаются эксплуатационные затраты, так как увеличивается износостойкость оборудования. Поскольку при использовании частотно-регулируемого привода обеспечивается «мягкий» запуск, отсутствуют большие пусковые токи.
Пример. Электродвигатель мощностью 12 кВт используется для электропривода насоса с регулированием в одном случае дросселированием, а в другом — с помощью ЧРП. Общая загрузка насоса составляет 50 %. Необходимо определить, насколько снизится потребляемая мощность электродвигателя при использовании частотно-регулирующего преобразователя.
Решение. Воспользуемся расчетными зависимостями, представленными на рис. 2.5. Для обеспечения 50%-ной расчетной загрузки насоса, при его дросселировании задвижкой, требуется мощность электродвигателя 9 кВт, тогда как при использовании ЧРП — всего 1,6 кВт. Снижение потребляемой мощности равно 7,4 кВт.
Как уже отмечалось, производительность двигателя зависит от частоты вращения вала, поэтому применение частотно-регулируемого привода наилучшим образом сочетается с насосно-вентиляторной нагрузкой. Оценки показывают, что экономия электрической энергии при использовании частотно-регулируемого привода при переменной загрузке насосов, вентиляторов и компрессоров может составлять 25—50 %.
Следует отметить, что применение ЧРП приводит к ухудшению качества электрической энергии (возникает несинусоидальность кривой напряжения, которая может быть снижена применением фильтров высших гармонических составляющих напряжения на вход ЧРП) [6].