

tmech_stat
.pdfСинуси кутів визначимо з рис.1.3. Очевидно, що кут дорівнює
DEF
куту між прямими (СО) та (ВО), тобто 45°. Для sinβ з рис.1.3. маємо:
sinβ = sin(180° − δ) = sinδ.
З трикутника АВО :
sinδ AB |
|
AB |
. |
OA |
|
AB2 OB2 |
|
Оскільки АС = СВ = ОВ, то
sinβ = sinδ |
|
2 CB |
|
2 |
. |
|
|
CB)2 CB2 |
|
5 |
|
||
(2 |
|
|
||||
Визначимо sinγ, враховуючи що для трикутника DEF виконується умова: β + γ + 45° = 180°. Одержимо:
sinγ = sin(180° − 45° − β) = sin(135°−β) = sin135°∙cosβ − sinβ∙cos135°.
Оскільки кут β тупий, то cosβ = 15 . Маємо
sinγ 22 15 22 25 0,1
 10 .
10 .
Таким чином, на підставі формули (2) шукані реакції дорівнюють
RA P sin 45 5 |
|
|
|
|
10 кН = 15,81 кН, |
||||
sin |
|
|
|
|
RB P sin |
5 |
|
|
|
2 кН = 7,07 кН. |
||||
sin |
|
|
|
|
11
2. ПРОСТОРОВА СИСТЕМА ЗБІЖНИХ СИЛ
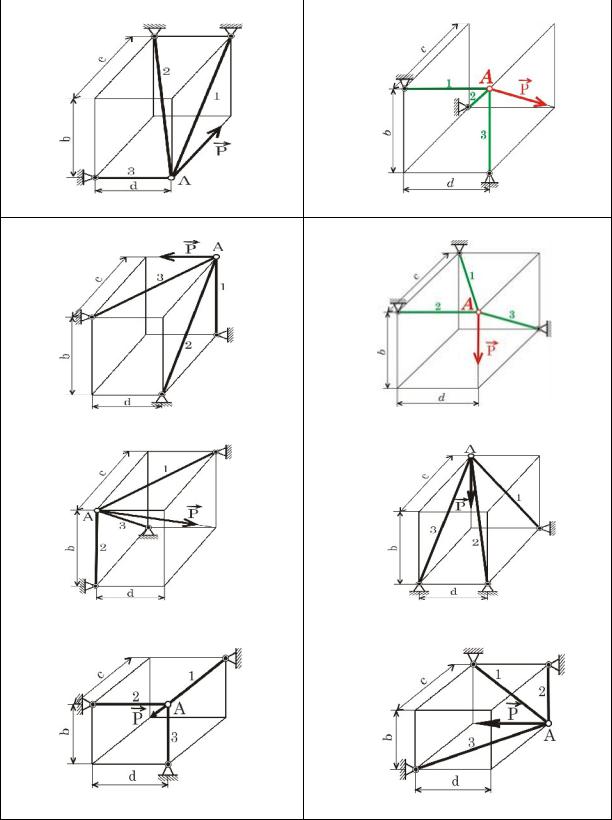
Визначити зусилля, що виникають у трьох невагомих абсолютно жорстких стержнях під дією сили Р (рис.2.1), і вказати який із них стиснутий, а який розтягнутий. Стержні прикріплені до основи та з’єднуються між собою за допомогою шарнірів. Дані потрібні для розв’язання задачі подано у таблиці 2.
Таблиця 2
Варіант |
Р, Н |
d, м |
b, м |
c, м |
Варіант |
Р, Н |
d, м |
b, м |
c, м |
1 |
10 |
3 |
4 |
4 |
16 |
16 |
1,5 |
1,5 |
2 |
2 |
4 |
6 |
8 |
8 |
17 |
10 |
4 |
4 |
7,5 |
3 |
2 |
1,5 |
2 |
2 |
18 |
24 |
2 |
2 |
3,75 |
4 |
24 |
7,5 |
4 |
4 |
19 |
10 |
15 |
8 |
6 |
5 |
16 |
6 |
8 |
8 |
20 |
10 |
7,5 |
4 |
3 |
6 |
4 |
6 |
8 |
8 |
21 |
12 |
15 |
8 |
6 |
7 |
2 |
3 |
3 |
4 |
22 |
12 |
7,5 |
4 |
3 |
8 |
16 |
6 |
6 |
8 |
23 |
20 |
3,75 |
2 |
1,5 |
9 |
4 |
3 |
3 |
4 |
24 |
24 |
15 |
8 |
6 |
10 |
12 |
1,5 |
1,5 |
2 |
25 |
10 |
8 |
6 |
6 |
11 |
20 |
3 |
3 |
4 |
26 |
10 |
15 |
8 |
8 |
12 |
10 |
8 |
8 |
15 |
27 |
16 |
7,5 |
4 |
3 |
13 |
12 |
4 |
4 |
7,5 |
28 |
16 |
8 |
6 |
6 |
14 |
24 |
3 |
3 |
4 |
29 |
30 |
4 |
3 |
3 |
15 |
2 |
8 |
8 |
15 |
30 |
10 |
7,5 |
4 |
4 |
Приклад 2. Три невагомих стержні AB , AC і AD з’єднані шарнірно в точці A і за допомогою шарнірів B , C , D прикріплені до горизонтальної підставки (рис. 2.2). Площини трикутників ABC і AOD вертикальні і взаємно перпендикулярні. На вузол A паралельно OD діє сила P 0,6 кН.
Знайти зусилля в стержнях, якщо ABO ACO 45 ; ADO 60 .
Розв’язання. 1. Виділимо тіло або точку, умови рівноваги якої дадуть можливість розв’язати задачу. Це – точка A , до якої збігаються всі стержні, зусилля в яких треба визначити. Отже, розглянемо рівновагу вузла A , користуючись аксіомою про звільнення від в’язей.
12
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
Рис.2.1,а
13

9 |
10 |
11 |
12 |
13 |
14 |
15 |
16 |
Рис.2.1,б
14

17 |
18 |
19 |
20 |
21 |
22 |
23 |
24 |
Рис.2.1,в
15

25 |
26 |
27 |
28 |
29 |
30 |
Рис.2.1,г
Приклад 2. Три невагомих стержні AB , AC і AD з’єднані шарнірно в точці A і за допомогою шарнірів B , C , D прикріплені до горизонтальної підставки (рис. 2.2). Площини трикутників ABC і AOD вертикальні і взаємно перпендикулярні. На вузол A паралельно OD діє сила P 0,6 кН.
Знайти зусилля в стержнях, якщо ABO ACO 45 ; ADO 60 .
Розв’язання. 1. Виділимо тіло або точку, умови рівноваги якої дадуть можливість розв’язати задачу. Це – точка A , до якої збігаються всі
16

стержні, зусилля в яких треба визначити. Отже, розглянемо рівновагу вузла A , користуючись аксіомою про звільнення від в’язей.
2. Аналізуємо сили, які прикладені до вузла А. На вузол А діє активна сила P , а також три реакції стержнів, які діють вздовж них, оскільки стержні ідеальні. Припустимо, що всі стержні розтягнуті, тому на рис. 2.2
їхні реакції напрямлені від вузла А. В задачі три невідомі RB , RD , RC , для відшукання яких можна скласти три рівняння рівноваги. Таким чином, задача статично визначена.
Рис.2.2
Початок системи координат виберемо в точці О, додатні напрями осей позначено на рис. 2.2.
3. Складаємо рівняння рівноваги:
n |
Xi RB cos45 RC cos45 0; |
i 1 |
|
n |
Yi P RD cos60 0; |
i 1 |
|
n |
Zi RB cos45 RC cos45 RD cos30 0. |
i 1 |
|
На підставі першого рівняння робимо висновок, що RB RC , з другого рівняння знаходимо RD :
17

RD cos60P 2P .
Від’ємний знак свідчить, що цей стержень стиснутий, оскільки спочатку припускали, що він розтягнутий. Нарешті, з третього рівняння знайдемо
|
R cos30 |
|
|
P cos30 |
|
|
|
R R |
; |
R R |
P |
3 |
. |
||
D |
|
|
|||||
B C |
2cos45 |
|
B C |
cos45 |
|
2 |
|
|
|
|
|
|
Додатний знак цих реакцій вказує, що стержні АВ і АС розтягнуті.
18
3. ДОВІЛЬНА ПЛОСКА СИСТЕМА СИЛ. ВИЗНАЧЕННЯ РЕАКЦІЙ ОПОР ТВЕРДОГО ТІЛА
Визначити реакції опор невагомої балки, зображеної на рисунку 3.1. До балки прикладається зосереджена сила Р, рівномірно розподілене навантаження інтенсивністю q та пара сил з моментом М. У варіантах 3, 8, 13, 18, 23, 28 до балки за допомогою невагомого нерозтяжного троса, перекинутого через блок, прикріплено вантаж ваги G, яку треба визначити. Вагу вантажа G у варіантах 14, 19 вважати відомою і рівною 10 кН. Стержні, які утримують балку у варіантах 2, 7, 12, 22, 27 вважати невагомими абсолютно жорсткими.
Дані потрібні для розв’язання задачі подано у таблиці 3.
Таблиця 3.
Варіант |
АВ, м |
ВС, м |
CD, м |
α, град |
β, град |
P, кН |
q, кН/м |
M, кН∙м |
1 |
1,5 |
2 |
1,5 |
30 |
60 |
3 |
1,5 |
5 |
2 |
2 |
1,5 |
2 |
60 |
60 |
4 |
2,5 |
3 |
3 |
3 |
2 |
1 |
30 |
45 |
2 |
1,5 |
4 |
4 |
2 |
3 |
2 |
60 |
- |
5 |
0,5 |
4 |
5 |
2 |
1 |
2 |
30 |
- |
3 |
2,5 |
3 |
6 |
1 |
1,5 |
1 |
30 |
60 |
5 |
2 |
2 |
7 |
3 |
2 |
1,5 |
45 |
30 |
4 |
3 |
5 |
8 |
2 |
3 |
1 |
60 |
30 |
2 |
0,5 |
2 |
9 |
2 |
2,5 |
3 |
30 |
- |
6 |
3 |
8 |
10 |
3 |
3 |
2 |
45 |
60 |
7 |
3 |
3 |
11 |
3 |
2 |
3 |
45 |
30 |
10 |
3,5 |
7 |
12 |
2 |
4 |
2 |
60 |
30 |
8 |
3 |
6 |
13 |
3 |
2 |
2 |
60 |
45 |
12 |
2,5 |
2 |
14 |
2 |
1 |
2,5 |
30 |
- |
9 |
1,5 |
4 |
15 |
2 |
3 |
3 |
60 |
- |
6 |
2,5 |
3 |
16 |
3 |
2 |
2 |
30 |
45 |
11 |
0,5 |
9 |
17 |
2,5 |
2 |
2,5 |
60 |
30 |
10 |
3 |
5 |
18 |
1,5 |
3 |
1,5 |
30 |
60 |
4 |
4 |
2 |
19 |
2 |
3 |
2,5 |
60 |
45 |
9 |
4 |
6 |
20 |
2,5 |
4 |
2 |
30 |
30 |
10 |
6 |
4 |
21 |
4 |
3 |
4 |
60 |
30 |
5 |
3 |
10 |
22 |
3 |
4 |
3 |
45 |
60 |
7 |
1,5 |
4 |
23 |
4 |
3 |
2 |
45 |
75 |
6 |
3 |
2 |
24 |
4 |
2 |
3 |
30 |
- |
9 |
5 |
7 |
25 |
3 |
3 |
3 |
30 |
- |
4 |
4 |
8 |
26 |
4 |
1,5 |
2,5 |
45 |
30 |
8 |
1,5 |
4 |
27 |
3 |
1 |
3 |
30 |
60 |
6 |
2,5 |
5 |
28 |
2 |
4 |
3 |
30 |
45 |
3 |
5 |
2 |
29 |
3 |
2,5 |
2 |
60 |
30 |
7 |
4 |
9 |
30 |
4 |
3 |
3 |
60 |
- |
4 |
2,5 |
2 |
19

1 |
|
|
q |
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
M |
|
|
|
|
|
E |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
А |
|
|
|
|
D |
|
|
|
|
M α |
|
|
|
β |
В |
C |
|
|
|
α |
А |
|
В |
C |
D |
|
|
|
P |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
β |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
q |
||
|
|
|
|
|
|
|
|
|
|
P |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|
|
M |
D |
|
|
|
|
q |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
q |
C |
|
|
|
|
А |
|
|
|
|
D |
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
В |
β |
|
|
G |
|
|
|
В |
C |
|
α |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
А |
α |
P |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
6 |
|
|
|
|
P |
β |
|
|
|
|
|
|
q |
|
|
|
|
M |
||
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
M |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
q |
|
|
D |
|
|
А |
В |
|
|
|
D |
|
|
C |
|
|||
|
|
|
|
|
|
|
|
|
|||||
P |
|
|
|
|
C |
|
|
|
|
В |
|
|
|
α |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
α |
|
|
|
|
|
|
|
|
|
|
|
|
А |
|
|
|
|
|
7 |
|
|
q |
|
|
β |
8 |
|
|
|
|
|
|
|
M |
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
P |
|
|
|
|
|
|
||
А |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
β |
|
|
|
||
|
|
В |
C |
|
α |
D |
|
|
|
G |
M |
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
А |
В |
|
C |
|
D |
|
|
|
|
|
|
|
|
|
|
|
α |
|
|
|
|
|
|
|
|
|
|
|
q |
|
P |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
9 |
|
|
|
|
|
|
10 |
|
|
|
|
|
|
|
|
|
|
|
|
α |
|
|
|
|
M |
|
|
|
|
|
M |
|
|
P |
|
|
P |
|
|
D |
|
|
|
|
|
|
|
|
|
|
|
||||
|
А |
В |
|
|
|
|
|
C |
α |
|
|||
|
C |
|
|
|
|
|
q |
β |
|
||||
|
|
|
|
|
|
D |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
q |
|
|
|
|
|
|
|
В |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A |
|
|
|
|
|
|
|
|
|
|
|
|
Рис.3.1,а |
|
|
|
|
|
|
|
|
|
|
|
|
|
20 |
|
|
|
|
|
|