

lab_mech1to8a / №1-05
.pdfЛабораторная работа № 1- 05 МАТЕМАТИЧЕСКИЙ МАЯТНИК
Т.М.Ахметчина
1. Цель работы
Изучить гармонические колебания на примере движения математического маятника. Определить ускорение свободного падения при помощи математического маятника.
2. Теоретическое введение
Колебания – движения или процессы, обладающие той или иной степенью повторяемости во времени. Колебания представляют собой один из наиболее распространенных видов движений в природе и технике.
2.1 Виды колебаний
Колебания могут быть разной природы: механические, электромагнитные, электромеханические и другие.
В зависимости от характера воздействия на колеблющуюся систему различают: свободные (или собственные), затухающие, вынужденные, а также автоколебания и параметрические колебания.
∙Свободными или собственными называются такие колебания, которые происходят в системе, предоставленной самой себе после того, как она была выведена из положения равновесия.
∙Вынужденными называются такие колебания, в процессе которых колеблющаяся система подвергается воздействию внешней периодически изменяющейся силы.
∙Автоколебания, как и вынужденные колебания, сопровождаются воздействием на колеблющуюся систему внешней силы; однако моменты времени, когда
2
осуществляются эти воздействия, задаются самой колеблющейся системой –
система сама управляет внешним воздействием.
∙При параметрических колебаниях за счет внешнего воздействия происходит периодическое изменение какого-либо параметра системы.
Простейшим видом колебаний являются гармонические колебания. Это такие колебания, при которых колеблющаяся величина изменяется по закону синуса (или косинуса). Этот вид колебаний особенно важен, так как многие колебания часто имеют характер, очень близкий к гармоническим колебаниям. Периодические процессы иной формы (с другой зависимостью от времени) могут быть представлены как наложение нескольких гармонических колебаний.
2.2 Гармонические колебания
Гармонические колебания представляют собой периодический процесс, в котором изменение величины ξ происходит по закону косинуса (или синуса):
ξ = Acos(ω0t +α) или ξ = Asin(ω0t +α) .
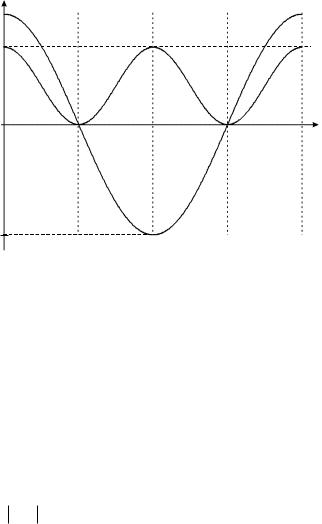
На рис.1 представлены графики зависимости смещения ξ и потенциальной энергии
U (U ~ ξ 2 ) от времени для материальной точки, колеблющейся по гармоническому
закону: ξ( t ) = ξm cos ω0t = Acos ω0t (при условии, когда начальная фаза колебаний α = 0).
Колебания совершаются около положения равновесия, отвечающего значению ξ =0.
3
ξ |
U |
А |
ξ(t) |
Um |
U(t) |
0 |
T0 t |
-А
Рис.1. Зависимости смещения ξ и потенциальной энергии U от времени при гармонических колебаниях.
Поскольку косинус изменяется в пределах от -1 до +1, значения ξ лежат в пределах от - А до +А. Наибольшая величина отклонения от положения равновесия А называется амплитудой колебаний. Амплитуда А – постоянная положительная величина
A = ξmax .
Аргумент косинуса - величина φ = ω0 t + α, называется фазой колебаний.
Постоянная величина α представляет собой значение фазы в момент времени t = 0 и называется начальной фазой колебаний. С изменением начала отсчета времени изменяется и α. Следовательно, значение начальной фазы определяется выбором начала отсчета времени. Так как значение ξ не изменяется при добавлении или вычитании из фазы целого числа 2π , всегда можно добиться того, чтобы начальная фаза была по модулю меньше π . Поэтому обычно рассматриваются только значения α , лежащие в пределах от −π до +π .
Поскольку косинус (синус) – периодическая функция с периодом 2π, различные состояния системы, совершающей гармонические колебания, повторяются через такой

4
промежуток времени, за который фаза колебаний получает приращение, равное 2π (см. рис.1).
ϕ = ω0 ( t2 − t1 ) = ω0 t , если ϕ = 2π , то t = T .
Период гармонического колебания T это такой промежуток времени, за который фаза колебаний получает приращение, равное 2π, т.е. совершается одно полное колебание. По истечении времени Т, соответствующего периоду колебания, движущаяся точка занимает своё прежнее положение (рис.1). Следовательно, период колебания Т определяется из условия:
[ω0 (t+T) + α]- (ω0 t + α) = 2π ,
откуда:
T = 2π . ω0
Величина
|
|
|
|
||
ω0 |
= |
2π рад. |
|
||
|
|
|
|
||
|
|
||||
|
|
Tс |
|
||
- называется собственной циклической частотой гармонических колебаний; значение
ω0 равно числу колебаний за 2π секунд.
Величина ν0 , обратная периоду колебаний - называется частотой колебаний
ν0 = 1 = ω0 1 ,
T 2π c
ν0 - число колебаний в единицу времени.
За единицу частоты принимают частоту такого колебания, период которого равен 1 с; эту единицу называют Герцем (Гц)
1колебание 1
1 Герц =
1секунду с
5
В качестве примера колебательного движения, поясняющего физические условия, при которых совершаются гармонические колебания, может служить движение математического маятника.
2.3 Математический маятник
Математическим маятником называют идеализированную систему, состоящую из невесомой и нерастяжимой нити, на одном конце которой прикреплена масса, сосредоточенная в одной точке. Хорошим приближением математического маятника является небольшой тяжелый шарик, подвешенный на тонкой длинной нити, при условии, что радиус шарика много меньше длины нити l .
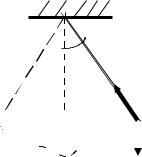
Если маятник отклонить от положения равновесия на небольшой угол φ (φ – угол, образованный нитью с вертикалью) и отпустить его, то маятник начнет совершать колебательное движение (рис. 2).
Mmgr








 l
l













mg
Рис.2. Движение математического маятника.
На маятник действуют две силы: m g – сила тяжести и T – сила натяжения нити. (сила сопротивления воздуха не учитывается). Радиус-вектор r проводится из точки O ,

6
относительно которой определяется момент действующих сил, к точке приложения этих
сил (векторов |
mg и T ). |
|
|
|
||
|
В соответствии с уравнением основного закона динамики вращательного |
|||||
движения твердого тела вокруг неподвижной оси можем написать: |
||||||
|
|
N |
|
|
|
(1) |
|
Iε = åM i , |
|
|
|||
|
|
i=1 |
|
|
|
|
где I |
- момент инерции маятника относительно оси, проходящей через точку подвеса |
|||||
|
|
|
N |
|
|
|
(точку О); ε =dω dt - угловое ускорение; åM i |
= M mg + M T - суммарный |
|||||
|
|
|
i=1 |
|
|
|
вращательный момент. |
|
|
|
|||
|
Вектор момента силы тяжести Mmgr относительно точки подвеса равен |
|||||
Mmgr |
= [ rmg] , поэтому момент силы тяжести Mmgr |
относительно точки подвеса приложен |
||||
в точке О и направлен перпендикулярно плоскости рисунка за чертеж, в соответствии с правилом построения векторного произведения. Момент силы натяжения нити MTr = 0,
т.к. угол между векторами T и r равен π .
С учетом сказанного, уравнение (1) принимает вид:
dω |
r |
r r |
] . |
(2) |
I |
= Mmgr |
= [ rmg |
||
dt |
|
|
|
|
Запишем полученное уравнение (2) основного закона динамики вращательного
движения в для математического маятника в проекции на ось, проходящую через точку подвеса перпендикулярно рисунку и направленную от чертежа к нам.
Обозначая угловое ускорение через |
ϕ |
и учитывая, что момент инерции |
||||
|
|
|
|
|
|
|
материальной точки равен ml2, а также то, что |
|
r |
|
= l, перепишем уравнение (2) в виде: |
||
|
|
|||||
ml |
ϕ = -mgl ×sin ϕ . |
|
(3) |
|||
|
2 |
|
|
|
|
|

7 Суммарный вращательный момент имеет такое направление, при котором маятник
стремится вернуться в положение равновесия, поэтому моменту Mmgr и угловому
смещению ϕ нужно приписывать противоположные знаки. Противоположность знаков момента Mmgr и углового смещения ϕ можно объяснить тем, что они направлены в
противоположные стороны.
Уравнение (3) можно привести к виду:
ϕ + |
g |
×sinϕ = 0 |
(4) |
|
l |
||||
|
|
|
При малых углах отклонения sinφ можно заменить углом φ (в рад.), тогда, обозначив
g
l
(5)
(6)
где
ω0 = |
|
g |
|
(7) |
|
l |
|||||
|
|
|
|
– собственная циклическая частота колебаний математического маятника.
(убедиться в справедливости решения (6) можно путем непосредственной подстановки его в уравнение (5)).
Из выражения (7) вытекает, что собственная циклическая частота колебаний математического маятника зависит только от длины маятника и ускорения свободного падения. Учитывая связь между собственной циклической частотой математического маятника и периодом колебаний, получим выражение для периода:

8
T = |
2π |
= 2π |
|
l |
|
. |
(8) |
ω |
|
||||||
|
|
|
g |
|
|||
|
0 |
|
|
|
|
|
|
3. Описание экспериментальной установки
9
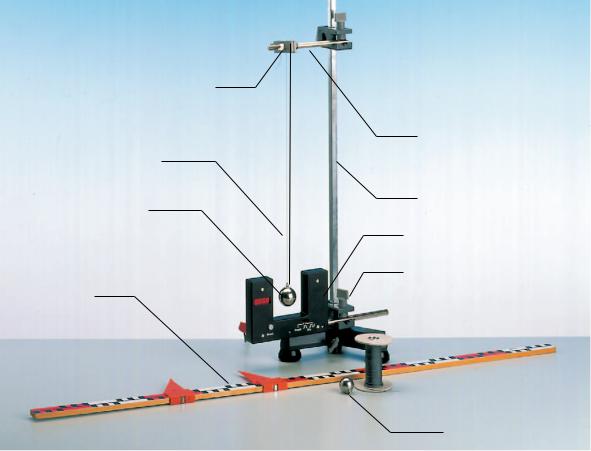
Общий вид экспериментальной установки показан на рис.3.
2
2
1
4
5
3
7
2
9
6
8

10
Рис.3. Экспериментальная установка для определения периода колебаний математического маятника:
1 - стальной шарик массой m1= 68 г (D=24,4 мм); 2 - стальной шарик массой m2 =135 г (D=32 мм); 3 - нить; 4 - регулятор длины нити; 5 - верхний кронштейн; 6 - нижний кронштейн; 7 - штатив; 8 – измерительная линейка с двумя передвижными указателями (L=1000 мм); 9 - счетчик колебаний.
Время в секундах, а также полное число колебаний маятника высвечивается на дисплее счетчика. Коммутация режимов работы счетчика осуществляется с помощью переключателя, имеющего четыре положения:
1)полное число колебаний маятника определяется, когда переключатель находится
вкрайнем левом положении (при этом на дисплее высвечивается одна светящаяся точка);
2)время, в течение которого происходит перекрытие маятником фотоэлемента, определяется, когда переключатель находится во втором слева положении (при этом на дисплее высвечиваются две светящиеся точки).
3)время полупериода определяется, когда переключатель находится в третьем слева положении с обозначением:
(при этом на дисплее высвечиваются три светящиеся точки).
4)полное время колебаний маятника определяется, когда переключатель находится в крайнем правом положении с обозначением:
(при этом на дисплее высвечиваются четыре светящиеся точки).