

Расчет и построение графиков сигналов в цифровой системе с наблюдателем и регулятором состояния
Вектор начальных условий:
![]()
![]()
![]()
![]()
_
x1(0)=0
_
x2(0)=0
_
x3(0)=0
Решение уравнений состояния
|
k |
x1(k) |
x1(k) |
x2(k) |
x2(k) |
x3(k) |
x3(k) |
u(k) |
|
0 |
0.0E+00 |
0.0E+00 |
6.3E+02 |
0.0E+00 |
5.0E-02 |
0.0E+00 |
0.0E+00 |
|
1 |
4.7E+00 |
0.0E+00 |
5.2E+02 |
9.3E-10 |
-2.3E-01 |
2.3E-13 |
-2.1E-10 |
|
2 |
8.2E+00 |
8.3E+00 |
3.8E+02 |
3.9E+02 |
-1.8E-01 |
-1.8E-01 |
-2.3E+02 |
|
3 |
6.9E+00 |
6.9E+00 |
-9.2E+02 |
-9.2E+02 |
-2.4E+00 |
-2.4E+00 |
1.5E+02 |
|
4 |
4.9E-01 |
4.9E-01 |
-3.0E+02 |
-3.0E+02 |
1.9E+00 |
1.9E+00 |
-5.7E+00 |
|
5 |
-4.5E-03 |
-4.5E-03 |
2.5E+00 |
2.5E+00 |
-1.5E-02 |
-1.5E-02 |
3.7E-02 |
|
6 |
5.2E-12 |
5.2E-12 |
-6.6E-10 |
-6.6E-10 |
-2.1E-12 |
-2.1E-12 |
1.2E-10 |
|
7 |
3.8E-13 |
3.8E-13 |
-2.3E-10 |
-2.3E-10 |
1.5E-12 |
1.5E-12 |
-4.5E-12 |
|
8 |
-3.6E-15 |
-3.6E-15 |
2.0E-12 |
2.0E-12 |
-1.2E-14 |
-1.2E-14 |
3.0E-14 |
|
9 |
4.3E-24 |
4.3E-24 |
-4.8E-22 |
-4.8E-22 |
-2.3E-24 |
-2.3E-24 |
1.0E-22 |
|
10 |
3.3E-25 |
3.3E-25 |
-2.0E-22 |
-2.0E-22 |
1.2E-24 |
1.2E-24 |
-3.7E-24 |
¦Umax¦ = 2.2779590432E+02
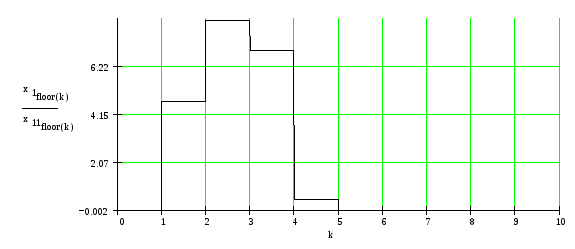
Графики сигналов в цифровой системе с наблюдателем



Приложение 1
Приложение 2
Приложение 3
Литература
-
Иванов Е.А., Сильченкова В.В. Линейные системы автоматического управления.- М.: МИЭТ,1980.
-
Иванов Е.А. Метод пространства состояний в теории линейных непрерывных и цифровых систем управления.- М.:МИЭТ,1990.
-
Изерман Р. Цифровые системы управления. – М.: Мир,1984.
-
Волков И.И., Миловзоров В.П. Электромашинные устройства автоматики. – М.: Высшая школа,1986.